户外高压隔离开关操动机构现场安装设备发展综述
2015-11-18张志富金甲杰洪云凤王嗣常白天宇
张志富 金甲杰 洪云凤 王嗣常 白天宇
(芜湖供电公司,芜湖 241000)
近年来,电网建设迅速发展,电压等级为110kV及以上计划扩建与改造的老变电站与新建变电站工程日渐增多,工程涉及大批新隔离开关的安装作业。
作为电力系统一次主要分断设备,隔离开关运行状况的好坏直接影响电能的传输、分配以及系统的安全可靠运行。业内相关统计结果指出,隔离开关机械部分故障大约占隔离开关全部故障的70%,而其操动机构的安装质量与其机械性能直接相关。
1 操动机构安装工艺及主要问题
1.1 操动机构的安装工艺
隔离开关操动机构安装示意图如图1所示。隔离开关本体安装完毕后,用铅垂法定位操动机构输出主轴和隔离开关输入主轴,使之同心。操动机构背面安装板通过适当长槽钢与基础立柱上安装板焊接固定,检查操动机构垂直度:±2~3mm/1m、水平度:±2~3mm/1m、同心度:±0.2mm[1]。确认合格后,准确测量操动机构输出主轴和隔离开关输入主轴的间距,以此加工相应垂直连杆使输入、输出主轴垂直对接。垂直连杆内径与输入、输出主轴直径配合,两者间隙不应大于1mm[2]。
传统安装工艺及机械尺寸调整不符合要求,易造成隔离开关分、合闸不到位,机构卡涩,进而导致触头过热,甚至瓷瓶断裂等事故。
1.2 操动机构安装的主要问题
由于目前隔离开关生产厂家不提供针对现场的专用安装设备,且操动机构的安装过程较为复杂,在实际的安装过程中,同心度很难保证,因此造成反复焊接,返工多次仍不合格的困难局面。

图1 隔离开关操动机构安装示意图
操动机构整体重量约 45~100kg,安装时通常需要4~5协同配合,安装过程必须保证操动机构的水平度、垂直度和同心度,还要防止电焊火花对人体的灼伤。因此,隔离开关操动机构在安装时存在费时费力、无法精确定位安装、难以保证安装质量且存在较大安全隐患等一系列问题。
2 操动机构传统安装方法
传统叠桩法、肩抬法、吊装法安装主要依赖以往安装经验,费时费力,无法实现精确定位安装,难以保证安装质量,并且存在较大安全隐患。
2.1 叠桩法
运用木块等材料人工叠桩搭建基础平台,为操动机构的定位安装提供支撑,进而实现操动机构安装的方法叫做叠桩法。叠桩法安装操动机构现场实景如图2所示。

图2 操动机构现场安装实景
叠桩法所使用的木块等材料易于获取,重复利用率高,但该法受地面基础状况影响较大。操动机构的安装必然伴随电缆沟的开挖、电缆管的敷设,此时地面基础状况复杂。人工叠桩法搭建基础平台,不仅费时费力,稳定性也很难保证。搭建的平台给操动机构提供定位支撑过程中,操动机构的三维调节繁琐困难,无法精确定位,安装质量难于保证。
2.2 肩抬法
肩抬法是指4名作业人员将操动机构整体抬起一定高度并保持平稳状态,其他作业人员对操动机构与隔离开关基础立柱间距进行测量,进而截取适当槽钢予以焊接固定的方法。
该法参与安装作业的人员较多,不仅耗费大量人力,对作业人员的安装经验也要求较高。由于作业人员高度不一,轻微晃动在所难免,同心度很难保证,往往点焊以后发现安装不合格,需要敲下来重新焊,反复多次才能勉强合格[3]。肩抬法安装操动机构现场实景如图3所示[4]。

图3 操动机构现场安装实景
2.3 吊装法
吊装法是指在隔离开关本体上选取一基准起吊点,运用小型吊装葫芦将操动机构平稳起吊就位,作业人员根据以往安装经验对操动机构进行三维调节,最终完成操动机构定位安装的方法。
吊装法受地面基础状况影响较小,但基准起吊点的选取是该法的难点,需要安装经验丰富的作业人员确定。该法可由一人起吊,其他作业人员进行定位安装作业,参与人员相对较少,但若基准起吊点选取不当,将严重影响操动机构的精确定位安装。该法应用相对较少。
2.4 操动机构传统安装方法总结
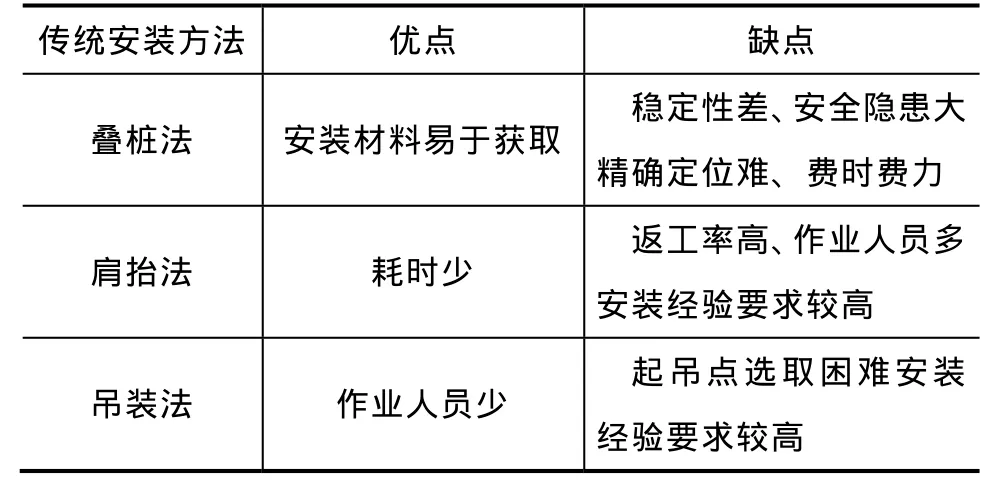
表1 传统安装方法总结
3 操动机构现场安装设备发展现状
近几年,对操动机构的安装研究取得了一定的成果。文献[4]研制的液压调节型升降平台仅需2人即可开展安装作业,每台操动机构安装耗时也大幅缩短。该平台具备较好的上下调节以及水平度和垂直度的微调节能力,但左右以及前后调节能力较差,平台样机如图4所示。

图4 液压调节型升降平台
文献[5]研制的大型隔离开关操作机构安装平台,设计带刹车的万向轮可将操作机构运输至指定位置,利用千斤顶通过X型升降机构快速调节操动机构的上下位置,通过十字交叉蜗杆实现操动机构水平度、上下、前后以及左右的微调。该平台样机如图5所示。

图5 千斤顶调节型升降平台
文献[4-5]所研平台,操作时要依托于平整地面,是典型的地基平台。操动机构的安装必然伴随电缆沟的开挖、电缆管的敷设,此时地面基础状况复杂,所研平台将无法展开有效工作。因此,该类平台对现场施工环境的适应性较差,只能附加条件的展开实际应用。
国网芜湖供电公司研制的户外高压隔离开关操动机构定位安装系统如图6所示。

图6 系统现场应用实景
系统依托隔离开关基础立柱、与地面基础非接触方式实现操动机构的安装。应用该系统开展操动机构的安装作业,三维定位精确高效,作业过程不受施工现场地面基础条件的影响,作业人员投入少且对人员安装经验不设门槛。
该系统相较于文献[4-5]所研平台,可全天候适应作业现场的复杂环境,作业过程安全高效,实际应用效果良好。
文献[6]与文献[4-5]方法一致,研制的设备在结构方式上有变化调整,但在现场只能有条件应用。
另外,文献[7]研制的对中工具,有效解决了操动机构垂直连杆安装时易产生中心点偏差的现象。
4 操动机构现场安装设备研制思路
4.1 受力基点分析
操动机构现场安装设备的受力基点有地面基础受力、隔离开关本体受力、隔离开关基础立柱受力3种方式,对应的安装方法及主要难点见表2。

表2 操动机构安装设备受力基点分析
叠桩法与肩抬法适合在地面基础状况良好、多人协同默契有序的前提下开展安装作业,但施工现场地面基础状况复杂多变,多人协同难以控制,此类方法应用上存有较大局限。
基准起吊点的选取是吊装法的难点,该法对安装经验有较高门槛,不适合推广为隔离开关操动机构的标准化安装作业,一般很少应用。
柱基法是指安装设备固定在隔离开关的基础立柱上,设备整体悬空与地面非接触。该法不受地面基础状况的影响,对安装现场环境适应性强,但安装设备与基础立柱固定连接的稳定性问题应给予重视。
4.2 安装设备研制的指导思路
研制的操动机构现场安装设备应具备三维调节定位以及水平度和垂直度的微调节功能。
目前,调节的动力主要有液压、电动、千斤顶以及螺杆调节。安装设备的研制应以便于推广为标准化安装作业为指导,且遵循小型化、轻量化、一体化的思路。
5 结论
目前,户外高压隔离开关操动机构现场安装设备的发展滞后于电网建设。针对现场安装操动机构的实际需求,研制实用高效的操动机构安装设备,已然成为迫切所需。根据文中的研制思路,利用柱基法原理研制相关安装设备应给予充分重视。
[1] Q/CSG 11105.2—2008. 南方电网工程施工工艺控制规范[S].
[2] GBJ 147—1990. 电气装置安装工程高压电器施工及验收规范[S].
[3] 盛明学, 王志清. 户外高压隔离开关常见故障的原因分析与处理[J]. 高压电器, 2010, 46(10): 93-96.
[4] 孙宁. 户外高压隔离开关电动机构箱安装专用工具研制[J]. 高压电器, 2011, 47(7): 76-79.
[5] 陈显辉, 雷欢. 大型隔离开关操作机构安装平台的研制[J]. 机电信息, 2013(27): 132-133.
[6] 魏忠明, 尹志. 隔离开关操作平台找正的施工方法比较[J]. 云南电力技术, 2006, 34(2): 50-51.
[7] 李晓武. GW 系列隔离开关垂直连杆安装工艺改进[J]. 湖南电力, 2005, 25(2): 49-50.
