三维激光扫描技术在竣工测量中的应用研究
2015-11-16王建营谭智
□王建营 谭智
(天津市测绘院,天津 西青 300381)
三维激光扫描技术在竣工测量中的应用研究
□王建营 谭智
(天津市测绘院,天津 西青 300381)
三维激光扫描技术作为近年来才发展起来的新兴测量技术,以其快速、精确、无接触测量等优势在众多领域发挥着越来越重要的作用。近几年,随着经济发展和社会进步,建筑设计施工水平日臻成熟完善,各种造型独特的建筑也开始涌现,传统的竣工测量作业方式难以实现对此类建筑物的平面位置和高程的精确表达。本文利用三维激光扫描技术对某建筑进行竣工测量,并与常规竣工测量结果进行对比,证实了三维激光扫描技术可作为复杂建筑竣工测量的一种有效手段。
三维坐标;激光扫描;竣工测量;点云数据
0.引言
建筑工程规划竣工测量指在建筑新建、扩建、改建过程后,对建筑物进行相关位置、实际面积进行的相关测量[1]。根据规划管理的需要,将实际尺寸数据和建设工程规划许可证及附图进行比对后绘制建筑面积图和汇总面积报表,以便确定项目是否按照许可的内容进行建设。传统的竣工测量作业方式包括全站仪数字测图、GPS-RTK测量、手持测距仪和钢尺直接测量法等[2]。传统竣工作业方式能在野外获取有限个特征点数据,利用特征点数据绘制数字地形图和建筑物形状得到竣工测量成果,这种作业方式简单有效,适用于形状简单的建筑工程竣工测量。
随着经济和社会的不断发展和进步,建筑设计施工技术水平的日臻成熟完善,各种新式各异的建筑也开始涌现。对于剧院、博物馆、图书馆、大型购物商城等复杂异型建筑而言,传统竣工测量作业方式获取的有限个特征点数据难以精确表达建筑物的平面形状和高程信息。为此,寻找一种新的作业方式开展此类建筑的竣工测量显得尤为必要。
三维激光扫描技术作为一种非接触式主动测量系统,能大量快速地获取被测目标的线、面、体、空间等三维坐标数据,通过计算机重构其三维数据模型,反映客观世界的真实形态,能深入各种复杂场景进行作业,并具有点位精度高、采集的空间点密度大、速度快等特点[3]。目前,三维激光扫描技术已被广泛应用于考古测量和文物保护重建、建筑物三维重建、变形监测、工业制造等诸多领域[4-7]。
三维激光扫描技术的出现,为复杂建筑物竣工测量提供了新的解决思路。利用三维激光扫描技术可以快速高效获取大量建筑物表面的点云数据绘制竣工测量图,精准反应建筑物外形和高度信息。本文利用三维激光扫描技术对某建筑进行竣工测量实验,并与常规竣工测量结果进行对比,证实了三维激光扫描技术可作为复杂建筑竣工测量的一种有效手段。
1.实验设计
选定异形建筑物一栋,经过现场踏勘确定控制点网,利用三维激光扫描仪对竣工建筑物外形开展三维点云数据扫描,作业模式可采用测站配定向点的点云扫描模式,获取实验建筑物完整的点云数据信息。
利用专业的数据处理软件对点云数据进行数据处理,包括点云数据配准、点云数据滤波、点云数据压缩,获取异形建筑物任意部位的建筑尺寸数据。依据建筑标高,对点云数据进行切片,获取建筑物每一层的横截面数据,拟合成建筑物每一层轮廓,标注拟合轮廓线长度与常规竣工测量结果进行对比分析。
实验中三维激光扫描仪为奥地利Riegl激光测量系统公司生产的Riegl Vz-1000三维激光扫描仪。该扫描仪每秒能发射30万个非接触激光脉冲信号,百米单次测量精度达到8mm,重复测量精度提升到5mm,最大测量距离能够达到1400m(反射率>90%)和700m(反射率>20%),扫描角度垂直方向达到100°(+60°至-40°),水平方向达到360°(0°至360°)。
常规竣工测量采用全站仪数字测图作业方式。实验中全站仪采用日本拓普康公司生产的ES-101电子全站仪。该全站仪测角精度达到1″,测距精度为3+2ppm×D mm(无棱角模式)和3+2ppm×D mm(棱镜模式)。
2.实验与结果分析
2.1 数据采集
选定某异形建筑物(如图1所示)作为实验建筑物。该建筑造型独特,主体为棱台异形建筑,由底部至顶部逐渐变小,采用常规的作业模式难以实现对各项规划要素的精确表达。

图1 异形建筑物外形
通过现场实地踏勘,依据建筑物外围轮廓,在建筑物外围布设11个控制点,为保证建筑物第二、三层的退台式建筑的扫描,在该建筑物顶部还布设了7个控制点,共布设18个控制点构成扫描控制网。(如图2所示)每个控制点至少有一个与之通视的点,通视点距离控制在200至400米,特殊情况下在100米内。控制点至扫描目标距离控制在160以内。扫描控制网包括平面控制网和高程控制网。平面控制采用全站仪及配套棱镜在控制点之间按二级边角测量的技术要求执行,测角中误差小于10″,测距中误差小于16 mm,测距相对中误差小于1/30000,最弱边边长相对中误差小于1/10000。高程控制在各控制点间开展四等水准测量,构成闭合水准网,闭合差小于

图2 控制网示意图
利用Riegl Vz-1000三维激光扫描仪,采用测站配定向点的点云扫描作业模式对该建筑开展三维激光扫描,采集点云数据。本建筑共设站18站,采集数据量达到3GB。
2.2 数据处理
采用配套的RiScan Pro软件,对外业采集的点云数据进行点云数据配准,配准精度评定,数据裁剪和滤波,数据压缩,得到实验建筑物预处理的点云数据,见图3。本次实验点云数据配准后,两测站间数据标准差均小于0.05 m,满足竣工测量精度要求。数据压缩时,为保留足够的物标细节特征,距离分辨率设置为0.10 m。
预处理的点云进行特征数据提取。提取的数据包括:竣工建筑的±零高、制高点、顶高,以及竣工建筑物外轮廓角点坐标等建筑物特征信息。(如图4所示)
依据建筑物设计层高信息,对建筑物点云数据进行切片处理,提取建筑物对应标高位置的建筑物横截面,作为对应层数的竣工面积。由于本建筑主体为异形结构,根据相关规范的要求,需要确定每层净高0米、1.20米和净高2.10米的具体位置,以便确定计算全面积、半面积和不计算面积的范围线。在该实例中,共计作出9个横截面(主体结构共计3层,每层的0、+1.20、+2.10位置处)。

图3 预处理点云数据
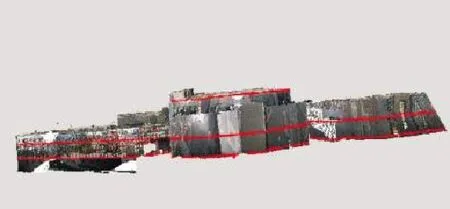
图4 切片时点云
将切片后的点云,输出至AutoCAD中,分段线性拟合成建筑轮廓线。扣除其抹灰层和装饰层后,标注拟合轮廓线长度,得到该建筑的各边边长,用于绘制建筑物的竣工测量图。(如图5所示)

图5 某建筑C区第二层点云横截面
2.3 结果分析
利用拓普康ES-101电子全站仪,采用全站仪数字测图作业方式对实验建筑物部分轮廓线进行常规竣工测量,获取这些轮廓线的边长,与三维激光扫描结果的拟合轮廓线长度进行对比,对比结果参见表1:
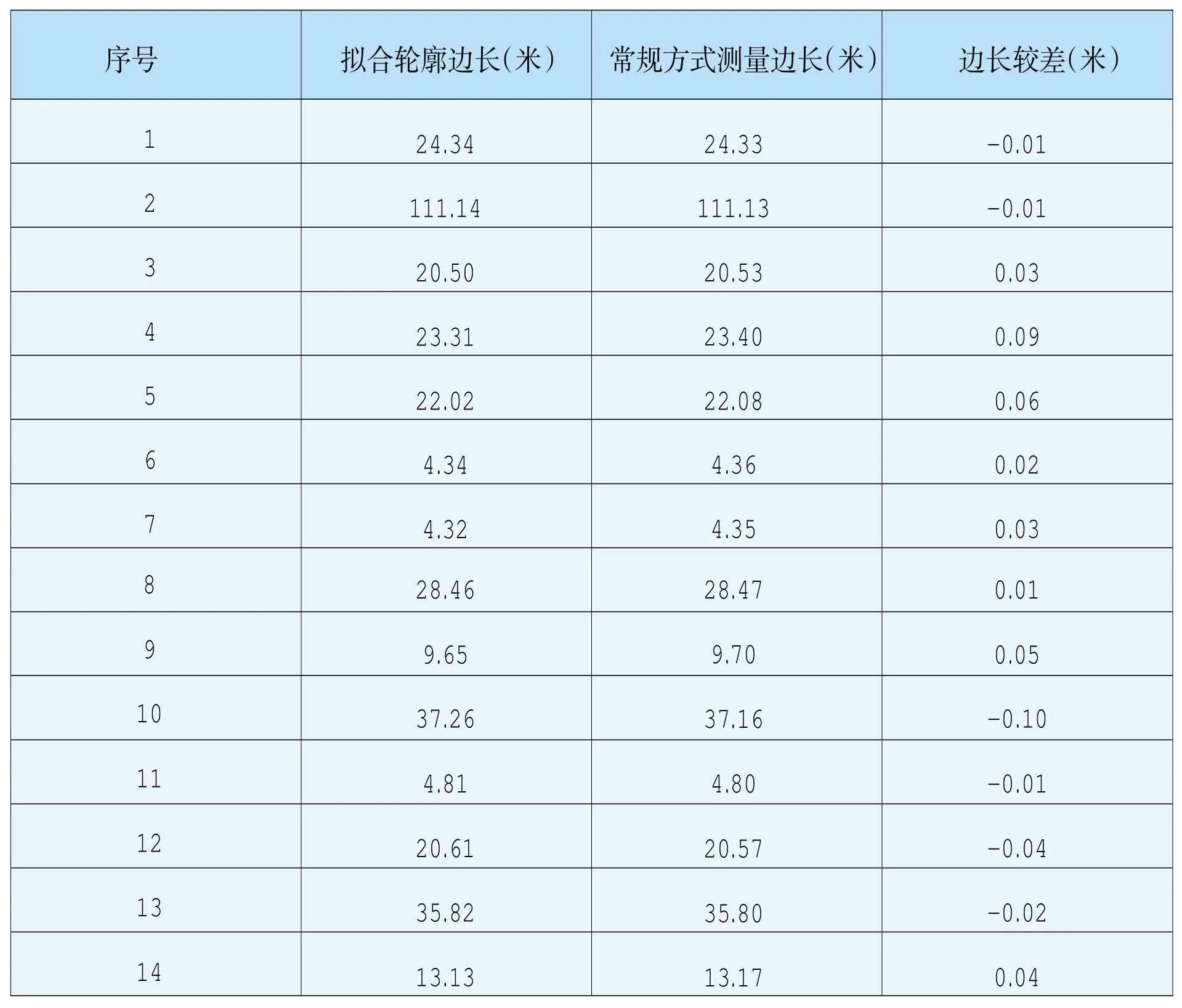
表1 边长比较表
表中结果显示,最大的差值为0.10米,最小的差值为0.01米,大部分差值控制在5cm以下,能满足建筑面积测量的要求。
实验结果表明,三维激光扫描技术可作为复杂建筑竣工测量的一种备选手段。
3.结论
三维激光扫描技术作为一种快速获取目标地物线、面、体、空间等三维坐标数据的高精度立体扫描技术,已被广泛应用于考古测量和文物保护重建、建筑物三维重建、工业制造等方面。本文利用三维激光扫描技术扫描异形建筑物,基于扫描结果获取了建筑物竣工测量成果,并与常规竣工测量结果进行对比,取得了较好的实验结果。实验结果表明三维激光扫描技术能够作为一种特定的竣工测量手段,用于异形建筑物的竣工验收测量。
【1】宁津生,陈俊勇,李德仁等.测绘学概论[M].第二版.武汉:武汉大学出版社,2014.
【2】李和气.房屋建筑面积测量[M].北京:中国计量出版社,2001.
【3】尹婷.三维激光扫描数据处理技术的研究[D].武汉:武汉理工大学,2010.
【4】尤红建,苏林,李树楷.基于扫描激光测距数据的建筑物三维重建[J].遥感技术与应用,2005,20(4):381-384.
【5】王潇潇.地面三维激光扫描建模及其在建筑物测绘中的应用[D].长沙:中南大学,2010.
【6】党晓斌.三维激光扫描计算在建筑物形变监测中的应用研究[D].西安:长安大学,2011.
【7】白成军.三维激光扫描技术在古建筑测绘中的应用及相关问题研究[D].天津:天津大学,2007.

P226+.3
B
2095-7319(2015)02-0022-05
王建营(1981—),男,双学士,工程师,天津市测绘院,现在主要从事GNSS应用研究。
