舵机三维尺寸公差设计关键技术研究
2015-11-15李海泓段丽华
李海泓,段丽华,王 勃
(1.中国空空导弹研究院,河南 洛阳 471009;2.北京航空航天大学,北京 100191)
0 引 言
舵机是空空导弹的重要组件,具有体积小巧、零部件数量多、结构复杂的特点,对研制过程中的零件加工精度、部件装配精度等都有非常高的要求。因此,在舵机设计阶段及工艺设计阶段对舵机的精度进行计算、预测、验证和优化,合理选择舵机零部件的制造精度等级,是确保舵机研制质量,缩短研制周期和降低制造成本的有效途径之一。然而空空导弹舵机这种具有复杂三维空间尺寸关系的机械产品,传统的基于尺寸链的公差设计方法理论比较复杂,效率低下,其三维空间尺寸链的构造和公差方程(组)的求解非常困难,有些情况下甚至无法实现公差方程(组)的精确求解,且对设计人员的专业技术水平要求过高[1],这已不能满足舵机三维公差设计实际应用的需求。若舵机的公差设计不能得到全面的验证,则很容易在生产中某个环节出现尺寸超差的问题,从而导致产品质量的改变,降低了零部件的互换性和整体产品的可靠性,同时会增加研制成本和时间。
本文通过对舵机三维尺寸公差设计关键技术的研究,提供具备三维空间复杂尺寸链的公差分析新方法,用来保障空空导弹舵机的研制精度及实现精益制造。
1 舵机三维尺寸与公差新概念体系
综合分析舵机制造及装配的全过程,结合三维数字化环境下舵机的工艺特点,提出舵机三维尺寸与公差新概念体系。在该体系中,尺寸与公差被认为是用于计量零件和装配件中某些重要的几何元素及其之间关系。其中尺寸是计量几何元素间数值关系的量值,用于对几何元素间的约束关系进行定量描述。尺寸公差是面向加工的量值,用来控制特定重要几何元素间的尺寸不超过给定量。无论是尺寸还是公差,都是对舵机中几何元素量值的描述,可以将传统的尺寸与公差定义还原为对几何元素及其之间关系的计量[2]。
(1)尺素
在舵机三维数字化模型中,用于定义和表示尺寸及其公差的几何元素(点、直线等)称为尺素,用g 表示。这些几何元素是舵机三维数字化模型上的形状特征,或者是其结构中相互定位的基准。
(2)显尺寸和隐尺寸
对于一个零件模型m,其上明确标注公差的尺寸和形位公差,称为m 的显式尺寸,简称显尺寸,记为dn;而无法通过加工工艺直接保证精度的尺寸称为m 的隐式尺寸,简称隐尺寸,记为dr。
(3)显域与隐域
对于一个零件模型m,其所有显尺寸的集合,称为m 的显尺寸域,简称显域,记为Dn;而m 中所有隐尺寸的集合,称为m 的隐尺寸域,简称隐域,记为Dr。
(4)主尺寸和定尺寸
对于一个零件模型m,其显域和隐域分别为Dn和Dr,k 为一个隐尺寸,即k∈Dr;d 为一个显尺寸,即d∈Dn。若k 对零件模型m 加工后的性能、质量和外在功能等具有重要影响,但在制造中却又难以直接保证的,则称k 为m 的一个关键尺寸,简称主尺寸。若d 决定k,则称d 为k 的决定尺寸,简称定尺寸,表示为d→k;反之,若d 不决定k,则称d 为k 的非决定尺寸,简称非定尺寸,表示为d|→k。
(5)主域和定域
一个模型m 上的所有主尺寸的集合称为此模型的主尺寸域,简称主域,表示为Dk。给定一个主尺寸k,则k 的所有定尺寸的集合称为k 的定尺寸集,简称定集,表示为Sk。一个模型m 上的所有主尺寸的定集的并集称为m 的定尺寸域,简称定域,表示为Dd。
从以上定义可知,主尺寸都是隐域的元素,主域是隐域的子集,定尺寸都是显域的元素,定域是显域的子集。从生产实际出发,隐域中的非主尺寸是指在制造中不能直接保证的,但是对产品的功能、性能和质量没有影响的非重要尺寸。显域中的非定尺寸是指影响到产品的功能、性能和质量,但是能在制造过程中直接保证精度的重要尺寸。
2 尺寸与公差的尺素表示模型
2.1 尺寸公差模型
根据不同类型尺寸的定义及其与舵机三维数字化模型上几何元素间的关系,尺寸公差信息包括尺寸类别、名义尺寸值、尺寸的相关定义尺素、上下偏差以及公差分布规律等其他尺寸公差信息。建立尺寸公差的尺素表示模型为

式中:t 为尺寸类别;gi(i =1,2,…,m)为尺寸的定义尺素;v 为名义尺寸值;u1和u2分别为尺寸的上下偏差;I 表示其他的尺寸公差信息。这样传统的尺寸及其公差的数值定义即可转换为用舵机数字化模型上几何特征表示。
2.2 形位公差模型
2.2.1 实尺素模型
根据前面的定义,尺素是由舵机三维几何模型上的边界组成,或者是该模型的定义基准等。将用来定义形位公差的尺素称为实尺素。
形位公差的实尺素模型利用实尺素定义和表示,对形位公差信息进行完整的描述,包括形位公差类型、理想几何元素、基准系、公差值、理想几何要素涉及的装配约束集合,以及其他形位公差信息。
根据不同类型形位公差的几何意义,定义形位公差的实尺素模型为

式中:t 为形位公差类型;g 为形位公差所描述的理想几何元素,即实尺素;B 为形位公差的基准系集合;e 为公差值;I 表示其他形位公差信息。基准系集合B=[b1,b2,… ,bm]的组成元素bi(i =1,2,…,m)的结构为),其中:为基准几何要素;di为实尺素g 与间的尺寸模型。
2.2.2 虚尺素模型
为了表达实际生产中的计量元素,解决在后续计算中对模型变动修改的需求,在实尺素的基础上,定义了与之对应且类型相同的一系列几何元素,将这些几何元素称为虚尺素。
在实尺素模型的基础上,利用虚尺素定义和表示形位公差的虚尺素模型,在产品模型中对与实尺素有关的约束关系进行搜索,构建原装配约束集合,然后生成虚尺素并构建其替代约束关系集,最后对虚实尺素变动关系进行定义。定义形位公差的虚尺素模型为

其中:f 为形位公差的实尺素模型;s 为原装配约束关系集合;g'为虚尺素;s'为替代约束关系集合;r为虚尺素变动方法。如图1 所示。

图1 虚尺素模型
虚尺素模型生成了虚尺素g',用于表示实际测量元素的位置和方向,并通过设立虚尺素变动方法r 使虚尺素的驱动成为可能。
2.2.3 虚尺素变动方法
具有相同公差带类型的形位误差对配合尺素方位的影响方式是相同的,因此可以采用相同的方法建立虚尺素。将形位公差按照公差带形状进行分类,并研究具有各类形位公差的几何元素虚尺素的构建方法[3-4]。
两平面间的公差带是常见的公差带。公差带为两平面间区域的形位公差,包括直线度、平面度、平行度、垂直度、倾斜度、对称度等。所限定的实尺素类型包括直线、平面等类型。考虑到三维建模的可行性,仅选取平面尺素上平面公差带的虚尺素进行构建。
直线公差带的实尺素为直线,公差类型主要包括直线度、平行度、垂直度等,虚尺素可以在圆柱面内自由变动,从虚尺素变动对配合尺素的影响来看,可定义虚尺素为公差带内的一条直线。
点公差带仅用于点的位置度公差,虚尺素的变动区域是以公差值为直径的球内区域。球形公差带的中心点的位置由相对于基准的理论正确尺寸确定。因此具有球形公差带的尺素,可定义其虚尺素为公差带内的点,并将位置度公差转换为虚尺素到基准的尺寸公差。
2.3 工程尺寸驱动理论与技术
工程尺寸是指传统意义上的尺寸,在工程制图上对图纸的数值标注。尺寸标注往往要考虑加工顺序、基准选取、可加工性和加工成本等多方面的问题。尺寸标注首先要满足设计要求,零件不是孤立存在的,它总要与其他零件装配在一起,构成一个装配体。因此,从构形上看,零件的形状和大小必须满足零件间的装配关系。
建模过程参数是指设计人员利用UG 系统提供的特征、草图、布尔运算等设计工具,对建模过程进行输入控制,并可修改的参数。建模是为了得到最终设计模型,对设计过程无严格的要求,且UG 系统提供的设计工具种类丰富,对于同一模型往往可以有多种建模方法来实现,这些原因造成了建模过程参数具有多样性和不确定性。
因此,工程尺寸和建模过程参数在同一产品模型中往往不一致,二者之间存在差异,为了实现几何元素的变动,需要建立工程尺寸驱动方法。通过对工程尺寸和建模过程参数间的关系进行分析和研究,建立工程尺寸和建模过程参数间的映射关系,将工程尺寸信息转换为等效的建模过程参数信息,并向系统提交建模过程参数的驱动要求,从而实现工程尺寸对产品数字模型的间接驱动。
工程尺寸驱动原理的实现有两个难点:一是工程尺寸与建模过程参数间的映射原理的研究,包括映射模型的建立与分析,映射函数的推导等;二是映射关系求解方法的研究,以及相应的工程尺寸驱动算法的建立[5-6]。
2.4 公差的主尺寸分析方法
用几何变动思想和工程尺寸驱动技术,可建立基于几何求解的主尺寸公差分析方法。这里利用工程尺寸驱动技术,提出基于几何求解的公差分析方法,然后建立相应的几何计算分析模型。
主尺寸公差分析方法主要包括定尺寸搜索、主尺寸分析以及显、隐域的预处理三个部分,分析原理与流程如图2 所示。
该方法建立在显尺寸、隐尺寸、定尺寸、主尺寸及其相应域模型、定尺寸自动搜索和主尺寸自动分析的基础上。通过对相关域的构造方法研究,根据运算流程和功能需要,运用误差传递系数计算、定集搜索和主尺寸分析方法实现产品公差的主尺寸分析。
主尺寸是这种方法的核心内容、分析对象和结论载体。主尺寸公差分析方法的主体流程包括主域构建、定集搜索和主尺寸分析。

图2 主尺寸公差分析原理与流程
主尺寸的构建面向设计需求,从隐域挑选出对产品功能产生影响的重要隐尺寸;定集搜索基于几何变动,根据误差传递系数,在定域中将与主尺寸相关的定尺寸组成该主尺寸的定集;主尺寸分析根据定集信息,采用极值法或仿真法对主尺寸进行公差分析,得到主尺寸的误差分布情况。
主尺寸分析方法按照分析手段的不同,可以分为基于误差传递系数矩阵的方法和基于仿真的方法。按照公差分析方法的不同,基于误差传递系数矩阵的方法可以分为极值法、统计法等,基于仿真的方法可以分为极值仿真与蒙特卡洛仿真。
基于误差传递系数矩阵的方法计算速度快,但是由于忽略了二阶小量,不能达到非常精确,但可用于大多数的场合。基于仿真的方法直接模仿了极限状态,故其精度高,但要驱动产品模型进行尺寸变动或几何变动时,需要进行约束求解,其计算速度慢,而蒙特卡洛仿真是以大量实验次数为条件的(大于10 万次),以致蒙特卡洛仿真很难在可接受时间内达到可靠次数[7]。
3 舵机三维尺寸公差自动分析系统
基于以上理论研究,利用UG 系统,采用其二次开发工具UG Open 进行编程,开发舵机三维尺寸公差自动分析系统。该系统适用于各种复杂零部件的公差自动分析,其功能包括公差自动分析、误差累积过程模拟、工程尺寸集建立等。图3 所示为舵机三维尺寸公差自动分析系统的交互界面。
利用其对舵机三维模型尺寸定义,确定主尺寸集,通过自动公差分析求解出各公差对主尺寸的影响因子,如图4。根据影响因子大小调整尺寸公差,对影响因子大的尺寸公差进行控制,影响因子小的尺寸公差适当放宽,从而降低零件加工难度与加工成本,提高零件加工合格率,实现舵机数字化制造精度控制,提高舵机设计质量。
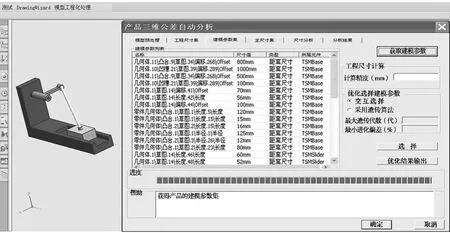
图3 舵机三维尺寸公差自动分析系统

图4 三维尺寸公差分析结果
4 结 论
本文构建了舵机三维尺寸与公差新概念体系,研究了尺寸与公差的尺素表示模型,开发了舵机三维尺寸公差自动分析系统。仿真结果表明,所设计系统可对舵机三维数字化制造精度进行控制,提高设计质量,降低制造成本,实现精益制造。
[1]Bourdet P,Mathieu L,Lartigue C,et al. The Concept of the Small Displacement Torsor in Metrology[M]. Series on Advances in Mathematics for Applied Sciences,1996,40:110-122.
[2]芮执元,梁建华,王鹏. 基于尺寸容差的虚拟装配公差优化设计[J]. 机械制造与自动化,2006,35(4):43-47.
[3]Wang Bo,Zheng Guolei,Duan Lihua. The Virtual Constraint Model and its Application to Tolerance Analysis[J]. Applied Mechanics&Materials,2013,10:925-927.
[4]许本胜,黄美发,苏庆勇,等. 基于特征几何变动的三维公差综合建模方法研究[J]. 制造业自动化,2014,36 (3):74-77.
[5]张开富,李原,邵毅,等. 基于关键特征和图的零件公差建模方法[J]. 西北工业大学学报,2005,23(5):648-650.
[6]王勃,郑国磊,段丽华. 轴类零件三维尺寸自动标注算法[J]. 北京航空航天大学学报,2013,39(6):829-834.
[7]杜比,胡卫军. 蒙特卡洛方法在系统工程中的应用[M]. 西安:西安交通大学出版社,2007.