一种基于D S P的机电作动器的设计
2015-11-05供稿孙信星SUNXinxing
供稿|孙信星 / SUN Xin-xing
飞行器中常用的作动系统有液压作动系统、电静液作动系统和机电作动系统[1]。机电作动系统,即机电作动器(Electromechanical Actuator, EMA),具有结构简单、工艺性好、使用维护方便等优点,近年来得到越来越广泛的应用[2]。机电作动器的工作原理是将电机的旋转运动通过减速器和丝杠螺母副转化为承载部件的直线往复运动。目前,机电作动器中越来越多地使用无刷直流电机作为动力源。与普通直流电机相比,无刷直流电机电机具有寿命长、转矩响应快、驱动能力强、控制方便简单等优点,在需要高可靠性和高效率的场合中受到人们的青睐。数字信号处理器( DSP)具有强大的数据处理能力和丰富的外设接口,大大简化了电动伺服系统的控制器设计。TI公司的DSP芯片TMS320LF2407A价格便宜、功能强大,其时钟频率可达40 MHz,具有两个事件管理器和多达14路的PWM信号输出,仿真调试方便[3]。本文应用TMS320LF2407A设计了一套全数字电动伺服系统,实现了机电作动器的三闭环控制,并给出了实验结果。
机电作动器的机械结构
机电作动器主要由无刷直流电机、齿轮减速器、丝杠螺母副以及承载部件等组成,如图1所示。丝杠螺母副采取丝杠旋转、螺母直线运动的正传动方式[4]。电机通过减速器将动力传递给丝杠,丝杠转动时螺母带动与之固连的承载部件一起作直线运动,并同时推动负载运动。
控制系统设计
整个控制系统由DSP控制电路、驱动电路、电流检测、转速检测和位置检测构成,机电作动器的三闭环控制系统如图2所示。

图1 机电作动器结构
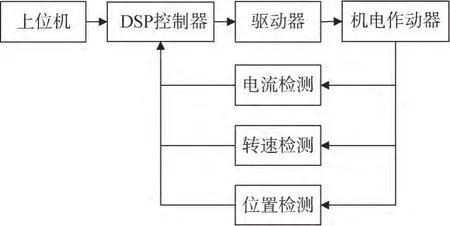
图2 机电作动器控制系统结构
控制系统的工作原理是:上位机通过串口给定机电作动器的位置指令,DSP控制器根据位置指令以及位置检测、转速检测和电流检测得到的反馈信号形成控制信号,并通过PWM输出给驱动器,由驱动器驱动机电作动器运转。在控制器内部,由位置指令和位置反馈形成位置误差,通过位置调节器产生转速指令,转速指令和转速反馈形成转速误差,通过转速调节器产生电流指令,电流指令和电流反馈形成电流误差,通过电流调节器产生控制信号,调节PWM输出的占空比,形成系统的三闭环控制。
硬件设计
◆ RS422串口通信
上位机与DSP控制器之间通过RS422串口通信实现指令下达和反馈上传。通信模块采用AD公司的ADM2582E芯片,该芯片具有隔离功能,最高隔离电压15KV,数据速率可达16Mbps,并带隔离式DC-DC转换器,兼容5 V和3.3 V逻辑电平,可以直接与TMS320LF2407A的SCI端口相连。
◆ PWM输出电路
TMS320LF2407A内部具有功能强大的PWM生成模块,使用时只需进行相关的设置便可输出PWM波。为了减小高频信号对系统的干扰,采用TI公司的隔离芯片ISO7240对PWM信号进行隔离,该芯片可以隔离峰值4 kV的电压,传输速率达25 Mbps。
◆ 驱动电路
系统的驱动电路采用智能驱动模块。该驱动模块的控制输入只有一路PWM信号和方向控制信号,通过内部电路将PWM信号分为六路,实现电机的速度和正反向控制。驱动器模块具有体积小、功率大、抗干扰性好、转换效率高、响应速度快、使用方便等特点,可以使控制电路的设计变得简单,并能降低成本、提高系统可靠性。
◆ 位置、转速和电流信号采集
反馈信号是形成闭环控制的关键,其检测精度直接影响系统的控制精度。本系统的位置传感器采用电阻式线位移传感器,将承载部件的直线位移转换为电压信号由TMS320LF2407A的AD端口进行采集。转速信号的采集是通过电机上的霍尔信号间接得到。TMS320LF2407A具有6路捕获单元,可方便地对霍尔信号进行采集。对于两对磁极的无刷直流电机,其霍尔信号的上升沿间隔固定为180o机械角度,只要测得两次上升沿的时间差,便能通过计算得到两次时间间隔内的平均转速。电流信号通过电流传感器得到,所用的采集芯片为ACS758,该芯片是一款采用霍尔原理的电流传感器,内部采用了光耦隔离,有效的防止了干扰。电流传感器的输出为电压信号,通过合适的转换电路可以由TMS320LF2407A的AD端口进行采集,并由内部计算转换为电流信号。
软件设计
在系统的三闭环控制中,电流环和转速环作为系统的内环,都采用PI调节器以提高响应速度,位置环采用滑模变结构控制保证系统的稳态精度,并使系统具有较好的鲁棒性。电流环采用PI调节器,使电流尽快地跟踪电流指令的变化,加快系统的响应,并在电机电流过大时,限制电流的幅值,起到保护作用[5]。转速环的作用是对电机转速进行规划,使电机保持较大的恒定转速,进一步提高响应速度。位置环采用滑模变结构控制,使系统在保持较快响应速度和较高稳态精度的同时,对参数变化和外部干扰具有较强的鲁棒性。
主程序中,首先进行软件的初始化,包括系统时钟的设置、通用I/O口的选择和各功能模块的初始化。软件初始化后再给控制系统发出初始化指令,使机电作动器的位置归零。接着启动SCI中断和AD中断。SCI中断在上位机传输指令时响应,响应后执行中断程序读取指令内容并上传反馈数据。AD采集通过定时器设定采样频率,在每一次的中断中,系统读取所需的采样数据,包括位置指令、位置反馈、转速反馈和电流反馈,然后进行相应的算法计算,并通过PWM输出控制量。系统的软件流程如图3所示。

图3 程序流程图
实验结果
根据上述设计进行了实验,系统的阶跃响应情况如图4所示。
阶跃特性是控制系统输入最为剧烈的情况,如果阶跃特性良好,则说明系统具有较好的动态性能。由实验结果可知,系统超调量不超过10%,上升时间约为55 ms,过渡过程时间不超过100 ms,达到了较为满意的结果。
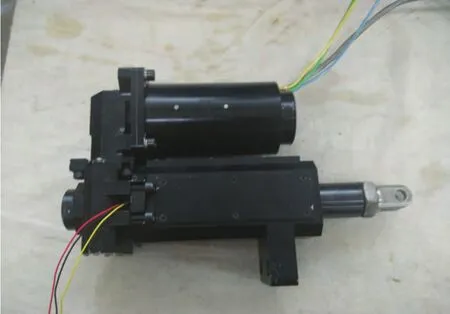


图4 系统阶跃响应图
[1] 薛龙献, 黄佑, 胡林, 等.飞行器作动系统驱动能源对比分析.机床与液压, 2008, 36(10): 176-178.
[2] 汪军林, 解付强, 刘玉浩.导弹电动舵机的研究现状及发展趋势.制导与控制, 2008(3): 42-46.
[3] 夏长亮.无刷直流电机控制系统.北京: 科学出版社, 2009.
[4] 沈引中.大功率电动舵机设计研究[学位论文].南京:南京航空航天大学, 2012.
[5] 梁磊.基于DSP的电动舵机控制系统的研究[学位论文].北京:北京理工大学, 2009.
