移动式机动车现场标准测速仪溯源技术的研究
2015-10-25白银,孙桥,杜磊,于梅,白杰,曹进
白 银,孙 桥,杜 磊,于 梅,白 杰,曹 进
(1.中国计量科学研究院,北京 100029;2.重庆市计量质量检测研究院,重庆 401120)
移动式机动车现场标准测速仪溯源技术的研究
白 银1,孙 桥1,杜 磊1,于 梅1,白 杰1,曹 进2
(1.中国计量科学研究院,北京100029;2.重庆市计量质量检测研究院,重庆401120)
介绍了当前广泛使用的两种基于光电和GPS原理的非接触移动式机动车现场标准测速仪的溯源技术,对光电式机动车速度仪和高精度机动车GPS测速仪进行了实验室模拟测速误差的检测和机动车道路速度实测值的对比试验。在10~180 km/h范围内特定速度点,采用同步齿形带式台架校准装置对光电式机动车速度仪进行校准;采用机动车GPS信号模拟器对高精度机动车GPS测速仪在相同速度点进行模拟测速误差检测。使用机动车道路速度实测方法对两类测速仪器在20~150 km/h速度范围内的测速性能进行对比,结果表明,两类测速仪器在速度波动较小时,不同速度点的测速偏差在±0.3%范围内;速度变化较快时,高精度机动车GPS测速仪的速度测量值响应速度较快,而光电式机动车速度仪的速度响应与之相比有一定的延时滞后,两者的最大测速偏差在±8%范围内。因此,在能够搜到6颗以上卫星信号时,使用高精度机动车GPS测速仪具有更好的测速性能。
计量学;机动车测速;高精度机动车GPS测速仪;光电式机动车速度仪;溯源技术
1 引言
移动式机动车现场标准测速仪作为机动车速度标准器,其溯源技术的研究对于机动车测速仪的计量检定具有重要意义。目前广泛使用的主流移动式机动车现场标准测速仪包括光电式机动车速度仪和高精度GPS测速仪,其中,国内外对于高精度机动车GPS测速仪的测速性能和溯源方法研究相对较少。英国研究者利用非接触式测速仪对两款高精度机动车GPS测速仪(VBOX II和Microsat R20)的检测结果表明,两款GPS测速仪均能够满足机动车测速需求[1]。Racelogic公司的研究者使用非接触式测速仪和高精度机动车GPS测速仪同时对机动车的加速及刹车过程进行检测,同步记录的速度-时间曲线比对结果表明,高精度机动车GPS测速仪准确性与非接触测速仪相近,而在响应速度、信噪比和可靠性方面都优于非接触式测速仪[2]。国内对于高精度机动车GPS测速仪的研究大多集中在测速方法研究以及标准器研制上[3~5]。孙桥等提出了一种基于现场GPS信号定标的实验室校准方法,实现了速度量值溯源至长度和时间计量基本单位[6]。对于高精度机动车GPS测速仪的溯源方法仍然有待进一步研究,为此,本文介绍了光电式机动车速度仪和高精度机动车GPS测速仪的工作原理和溯源技术,并进行了两类测速仪道路实测性能的对比分析。
2 移动式机动车现场测速仪工作原理
2.1光电式机动车速度仪
光电式机动车速度仪结构示意图如图1所示[7]。照明灯光在光学镜头下方的地面上形成光斑,反射光通过透镜成像到光电传感器(梳状电极)上,如图2所示,当光电式机动车速度仪与地面有相对运动时,成像经过光电转换和滤波输出窄带单频信号,该信号频率与车速成正比[8],经过信号处理电路计算并输出机动车的行进速度。
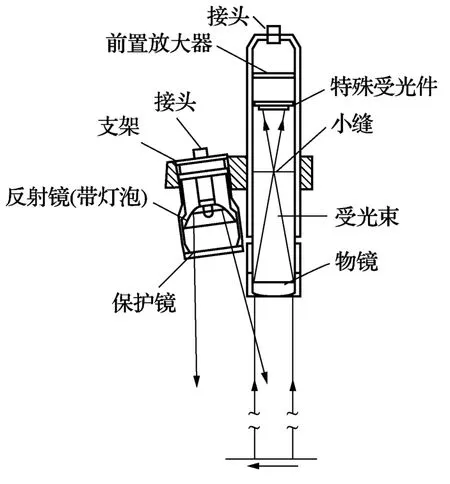
图1 非接触式速度计结构图
2.2高精度机动车GPS测速仪
GPS测速仪通过安装在运动载体上的接收器获取GPS信号,从而得到运动载体的速度[9]。本文研究的高精度GPS测速仪采用基于原始多普勒频移解算法测速,该算法基本不受载体运动状态的影响。多普勒频移是观测者接收到的GPS卫星载波频率fr与GPS卫星发射的载波频率fs之间的频率差fd,有:
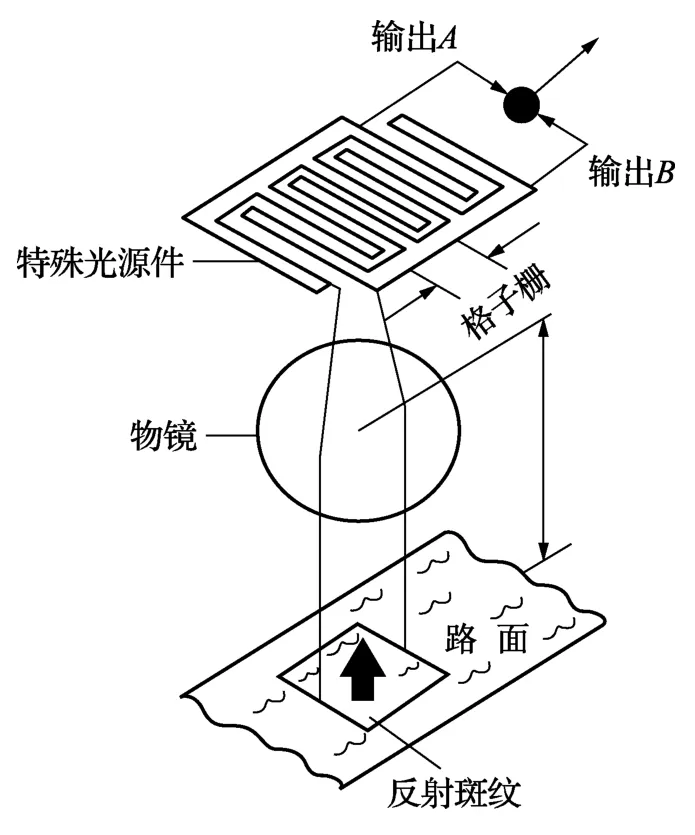
图2 非接触式速度计检测原理

式中:c为真空中光速,VR为卫星相对用户接收机的径向速度。根据GPS单点定位的数学模型,对站星伪距进行微分后,得到单点测速的数学模型:
3 移动式机动车现场标准测速仪溯源
3.1光电式机动车速度仪溯源
光电式机动车速度仪的测速、测距计量性能进行校准的方法已有校准规范[10]。其中,道路试验由于对试验场地和车辆行驶要求较高[11],计量机构多采用台架式校准装置,包括转鼓式和同步齿形带式。转鼓式校准装置见图3,该装置溯源到转速标准装置[12]。
同步齿形带式校准装置的基本原理与转鼓式校准装置相同,不同点是使用同步齿形带来模拟移动路面,见图4。
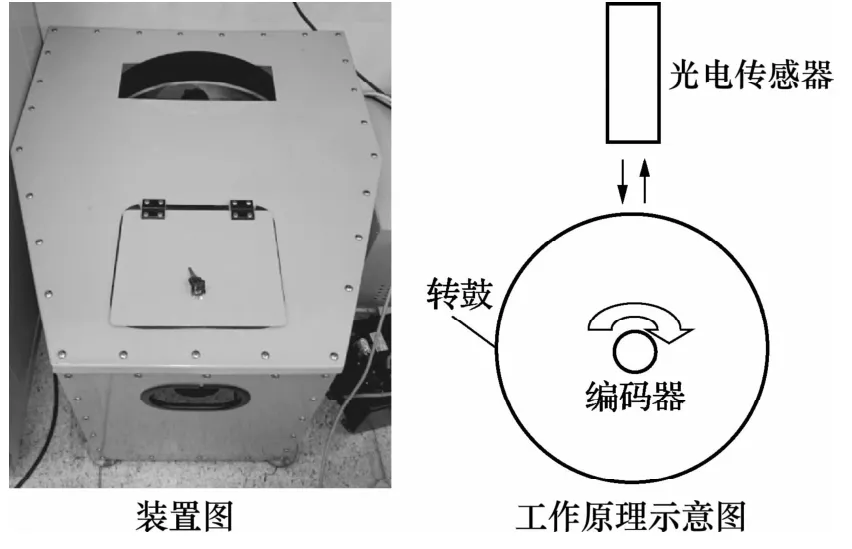
图3 转鼓式校准装置校准非接触式汽车速度计
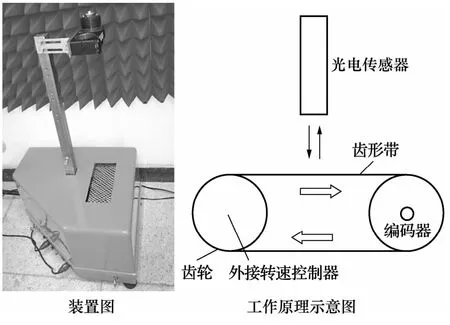
图4 同步齿形带式校准装置校准非接触式汽车速度计
3.2高精度机动车GPS测速仪溯源
使用GPS信号模拟器以及卫星信号场模拟装置对GPS测速仪进行模拟测速误差的检测。GPS卫星信号模拟器由GPS数据仿真软件、GPS卫星射频信号产生器和计算机组成。GPS卫星信号模拟器主要包括两部分,一部分是仿真数据生成和控制单元,另一部分是射频信号仿真单元。仿真控制软件是模拟器的核心,模拟器需要的控制参数由该软件计算得到。根据用户设置的试验环境,分别计算目标接收机接收的GPS卫星信号状态,控制12通道模拟器产生相应的GPS射频信号,利用软件产生GPS差分数据,将射频信号和差分数据同时送GPS接收机,进行系统测试。数据仿真阶段,各种对卫星导航有影响的系统和环境因素都已经完成建模,数学仿真利用这些模型计算出伪距、伪距率、多径延迟等参数,这些参数已经包含了GPS射频信号仿真所需的全部信息,如大气传播效应已经折合在伪距之中,目标的运动速度体现在多普勒频率中。
Racelogic公司生产的Labsat GPS信号模拟器具有GPS信号模拟、记录和回放功能,如图5所示。通常的使用方法只适用于对高精度机动车GPS测速仪的主机和显示输出部分进行模拟检测,不能对包括GPS天线的高精度机动车GPS测速仪进行整机检测。卫星场模拟器是根据卫星信号分布研制出的四棱锥形暗场,外部为金属材质,内部为吸波材料。射频模拟信号从顶端接入,GPS接收天线放置于暗场底部中央位置。本文利用GPS信号模拟器运行自行编制的测速场景模拟程序,结合卫星信号场模拟装置构建的检测系统如图6所示。
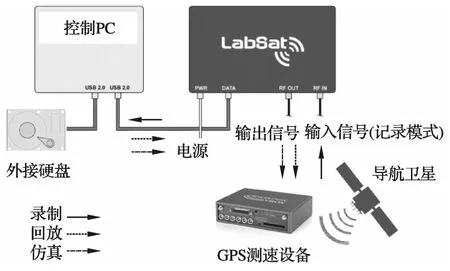
图5 高精度机动车GPS测速仪回放示意图
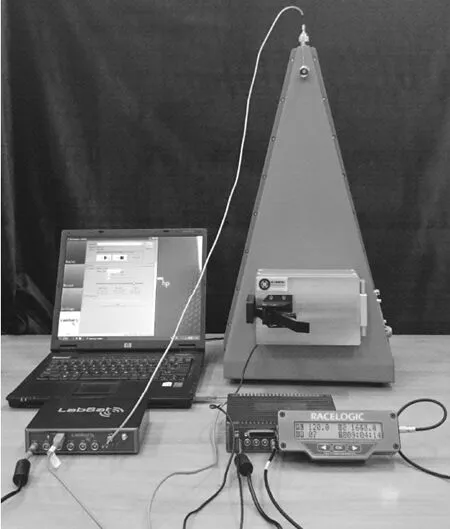
图6 高精度机动车GPS测速仪模拟检测系统图
3.3实验室模拟测速对比实验
使用同步齿形带式校准装置对光电式机动车速度仪(型号SG-820,出厂编号SG-0907820032)进行校准,每个速度点重复6次测量,结果如表1所示。其中,速度不大于50km/h时,计算绝对误差,km/h;大于50 km/h时,计算相对误差,%[10]。表2、3同。
从表1所列数据分析,光电式机动车速度仪校准过程中不调整光电系数情况下,在10~180 km/h范围内测量误差呈现非线性,最大测量误差为-0.78%,重复性小于0.1%。
检测高精度机动车GPS测速仪(型号Racelogic VBOX III,出厂编号031183,刷新率100 Hz)在10 ~180 km/h范围内的模拟测速性能指标,记录高精度机动车GPS测速仪的输出数据,并与模拟场景中的标准值进行对比。模拟检测过程中卫星数量9颗。结果如表2所示,为了与光电式机动车速度仪校准结果进行有效对比,测量误差的计算同表1。对表2的数据进行分析,高精度机动车GPS测速仪在10~180 km/h速度范围内模拟测速误差均为零,3次测量的重复性误差为零。
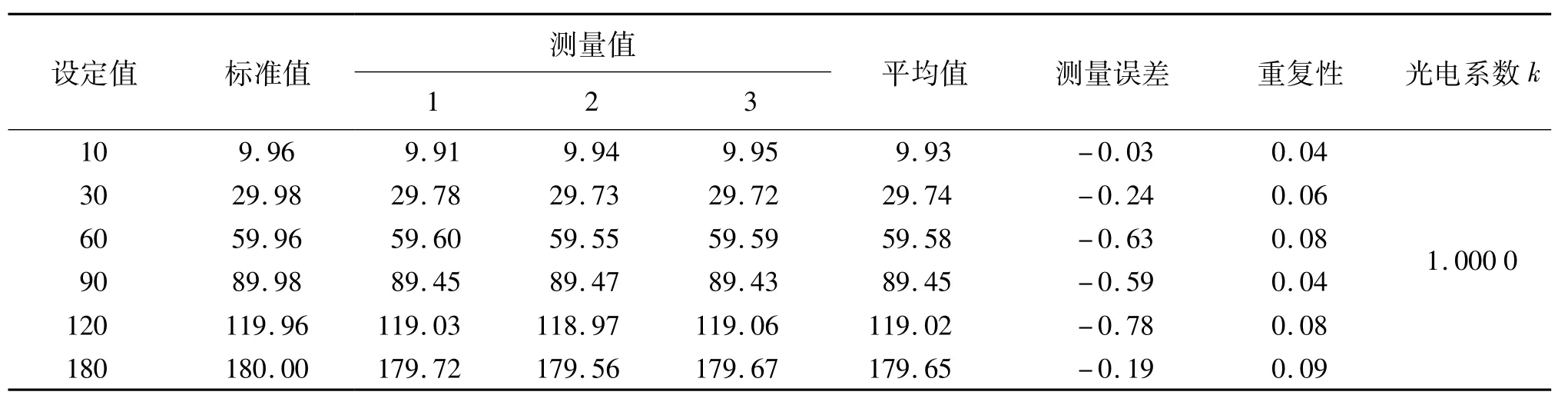
表1 使用同步齿形带式校准装置对光电式机动车速度仪的校准数据km·h-1
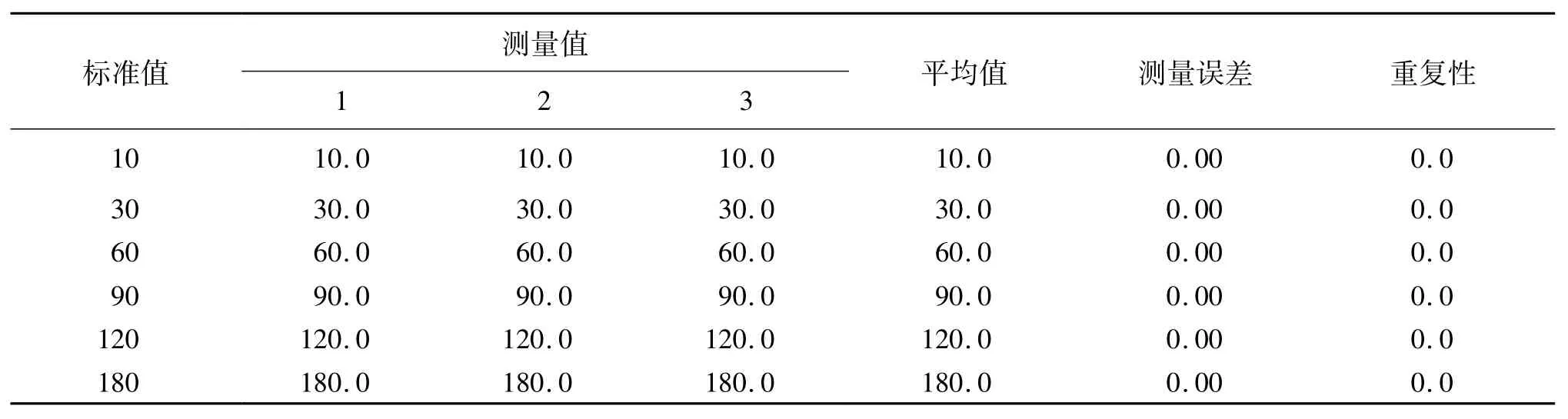
表2 使用机动车GPS测速仪模拟检测系统对高精度机动车GPS测速仪的检测数据km·h-1
对比光电式机动车速度仪和高精度机动车GPS测速仪的模拟测速误差检测结果,光电式机动车速度仪由于使用光电传感器作为核心器件,校准过程中同步齿形带不可避免的抖动导致其重复性比高精度机动车GPS测速仪差。光电式机动车速度仪在10~180 km/h范围内的测速误差呈非线性,修正较难;而高精度机动车GPS测速仪在10~180 km/h范围内的测速误差均为零,无需修正。因此,高精度机动车GPS测速仪的模拟测速性能整体优于光电式机动车速度仪。
4 道路实测比对试验
将前文中经过模拟校准的光电式机动车速度仪和高精度机动车GPS测速仪按要求安装在试验车上。试验过程中卫星数量9颗。对两种移动式机动车标准测速仪在试验车速度变化较快时的速度测量值进行同步采样,测量结果如表3所示。在试验车行驶速度波动较小时,检测两类移动式机动车标准测速仪的速度测量值,计算测量结果的偏差以及重复性列于表4。偏差的计算同表1。
使用两种移动式机动车现场标准测速仪在试验车加速到减速过程中进行测速并同时记录测速数据,将记录的数据绘制速度-时间曲线,如图7所示。
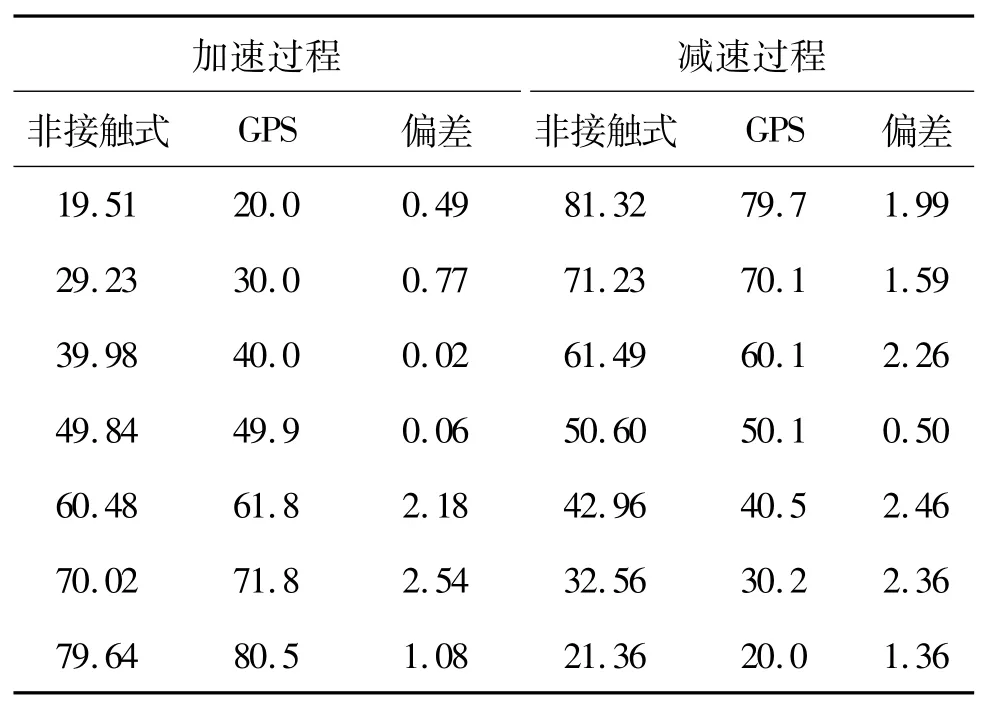
表3 速度变化较快时测速性能对比km·h-1
结合分析图7和表3、表4的数据,光电式机动车速度仪与高精度机动车GPS测速仪在机动车行驶速度波动较小时,测速准确度相近:在试验车不同速度点的相对偏差均小于0.3%;在相同速度点的测速稳定性、重复性性能也相近,3次测量的相对标准偏差均小于0.2%。在机动车加速和减速测量试验中,两类测速仪的测速结果偏差较大,其中9个速度点的测量偏差为1.0~2.5%;且在加速过程中,高精度机动车GPS测速仪测速值大于光电式机动车速度仪,减速过程中,高精度机动车GPS测速仪测速值小于光电式机动车速度仪。结合图7中2条曲线进行分析,这一偏差主要是由于光电式机动车速度仪测速数据的延时滞后造成。因此,在对行驶速度变化较快的机动车速度进行测量时,GPS测速仪由于响应快、稳定性好而占有较大优势。
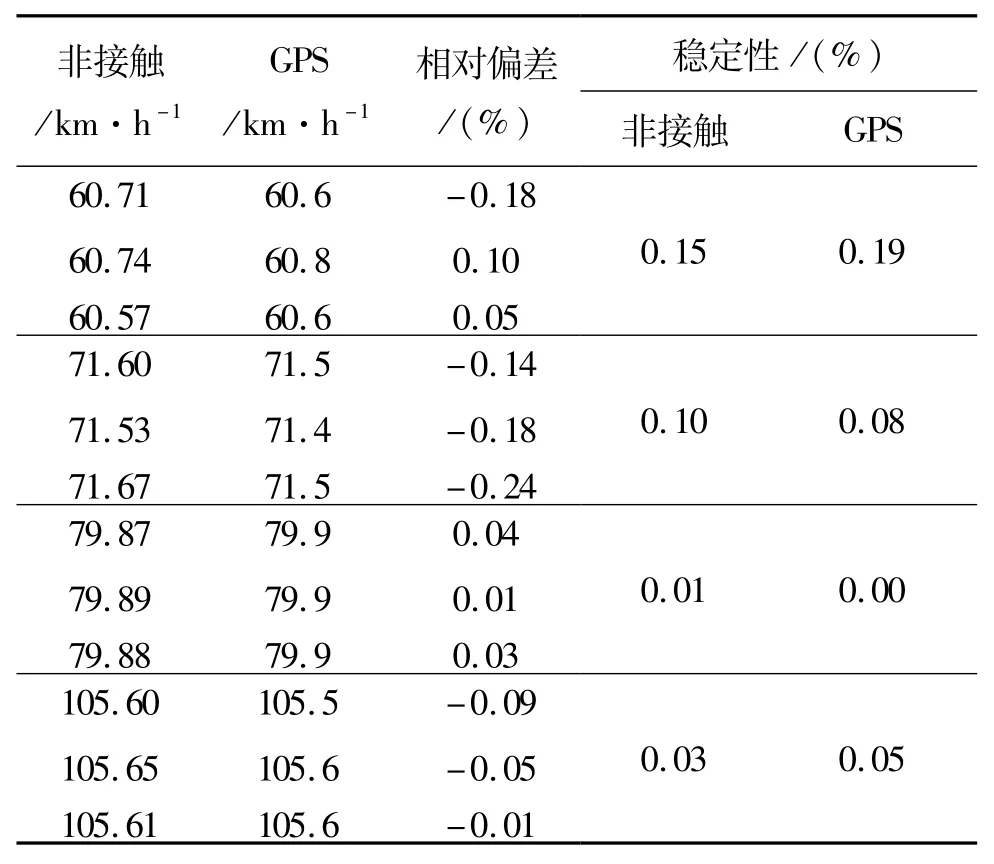
表4 速度波动较小时性能对比
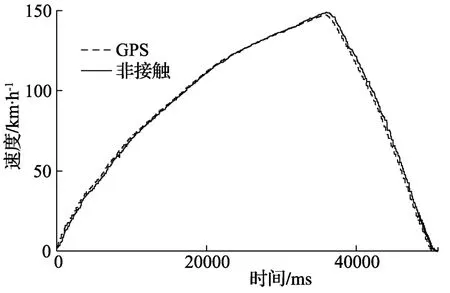
图7 采样的速度-时间曲线
5 结束语
本文介绍了移动式机动车现场标准测速仪的溯源技术研究。对光电式机动车速度仪进行校准的数据显示,光电式机动车速度仪在10~180 km/h范围内测量误差呈非线性,且部分速度计需要通过调整光电系数来保证测量误差在规定范围内。对高精度机动车GPS测速仪的模拟测速误差检测技术进行了研究,使用GPS信号模拟器与卫星场信号器组成的GPS模拟测速误差检测装置,对高精度机动车GPS测速仪进行模拟测速误差的检测,结果显示该装置能够对高精度机动车GPS测速仪在10~180 km/h范围内的模拟测速误差进行有效检测。通过道路实测试验,考察了两类测速仪在速度变化较快时的测速准确性对比并分析测量结果出现偏差的原因。试验结果表明高精度机动车GPS测速仪在机动车行驶速度变化较快时由于响应更快而具有更好的准确性,并且准确性和可靠性在机动车行驶速度波动较小时与光电式机动车速度仪相当。因此高精度机动车GPS测速仪在保证能够搜索到6颗以上恒定的卫星时,能够作为移动式机动车现场标准测速仪使用,在机动车测速法制计量技术领域具有较广阔的应用前景[13]。
[1]D Summers&S Lewis,HOSDB.Guidance for test houses on the use of satellite speed measurement equipment for Home Office type approval tests[S].2006.
[2]Racelogic Corporation.A Comparison of non-contact speed sensors[EB/OL].http://www.racelogic.co.uk/_ downloads/vbox/Application_Notes/Comparison%20of% 20Non-contact%20Speed%20Sensors.pdf.2013-07-04.
[3]赵军,刘美生,杨春生,等.基于GPS技术的速度标准装置研究[J].微计算机信息,2008,24(25):245-246.
[4]靳力.基于高速GPS的道路测速设备计量校准系统[J].计算机光盘软件与应用,2013,(4):180-182.
[5]张宝峰,耿丽红.GPS单点测速误差分析与数据处理[J].天津理工大学学报,2010,26(3):13-15.
[6]孙桥,蔡常青,张跃,等.基于多普勒频移观测值的机动车GPS测速仪校准技术的研究[J].计量学报,2010,31(5):456-459.
[7]尹建文,陆俊,蔡旭平,等.非接触式汽车速度计校准的研究与应用[J].中国科技成果,2010,11(19):36-38.
[8]戴金洲,彭铁军.非接触式机动车速度计检测方法浅析[J].中国计量,2010,(4):110-111.
[9]叶芳.基于GPS技术的车速传感器的研制与应用[D].重庆:重庆大学,2009.
[10]国家质量技术监督局.JJF 1193-2008,非接触式汽车速度计校准规范[S].2008.
[11]GB/T 12534-90,汽车道路试验方法通则[S].1990.
[12]陆俊,全付付,余挺,尹晓艺,非接触式汽车速度计校准装置校准方法探讨[J],工业计量,2012,(1).122-125
[13]杜磊,孙桥,蔡常青,等.侧装机动车雷达测速仪天线计量关键技术指标研究[J].计量学报,2013,34 (1):36-40.
Study on Tracing Technique for
Field Test Mobile Reference Vehicle Speed Meter
BAI Yin1,SUN Qiao1,DU Lei1,YU Mei1,BAI Jie1,CAO Jin2
(1.National Institute of Metrology,Beijing 100029,China;2.Chongqing Academy of Metrology and Quality Inspection,Chongqing 401120,China)
To study the tracing technology of field test mobile reference vehicle speed meters based on optical sensor and GPS receiver respectively,simulated and field test of speed measurement experiments for both non-contact vehicle speed meter and GPS vehicle speed meter were performed and the results were compared.The calibration of non-contact automotive speed meter was performed with synchronous belt simulator.The calibration was performed on several speed values in the range of 10~180 km/h.A GPS signal simulator system was used in simulated speed measurement error test for GPS automotive speed meter.The same speed values as that in the calibration of non-contact speed meters were tested.The field test performance of both
peed meters was compared.The relative deviations in uniform motion fell in the range of±0.3%.The relative deviations in acceleration and deceleration were much larger.The largest relative deviation fell in the range of±8%,which was caused by the lagging effect of non-contact automotive speed meter.It is inferred that the performance of GPS automotive speed meter is better than that of non-contact automotive speed meter,when at least 6 satellites can be found by GPS automotive speed meter.
Metrology;Vehicle speed-measuring device;High accuracy GPS speed meter for automotives;Noncontact automotive speedmeter;Tracing technology
TB934
A
1000-1158(2015)01-0072-05
10.3969/j.issn.1000-1158.2015.01.16
2013-12-24;
2014-04-14
国家重大科学仪器设备开发专项(2012YQ090208)
白银(1986-),女,内蒙古呼和浩特人,中国计量科学研究院博士后,主要从事力学运动学计量领域的研究。baiyin@nim.ac.cn
