基于小波包+FFT的FMCW雷达测距算法研究
2015-10-22孙春光刘斯邓敏唐立军刘文唐付桥任桂香周志
孙春光 刘斯 邓敏 唐立军 刘文 唐付桥 任桂香 周志

摘 要: 针对在货运火车对接过程中对距离测量的精确性和实时性的要求,提出小波包+FFT的FMCW雷达测距算法,实现了火车对接系统的高精度实时测距。首先在Matlab上进行仿真实验,对应距离段选取合适的小波包函数和节点,利用运算能力强大的DSP芯片实现小波包的分解与重构,然后使用4 096点的FFT算出目标对应的距离信息。在火车对接雷达测距系统的实验平台上进行多次重复实验,实验结果表明,在0.5~10 m范围内,测距精度达到0.2 m,在10~50 m范围内,测距精度达到0.3 m。
关键词: 小波包+FFT; FMCW雷达; 测距; 火车对接
中图分类号: TN911?34 文献标识码: A 文章编号: 1004?373X(2015)19?0008?04
Abstract: For the accuracy and real?time performance requirements of distance measurement in connection process of the freight trains, the range?finding algorithm of FMCW radar based on wavelet packet+FFT is proposed to achieve high precision and real?time range?finding of train connection system. This simulation experiments was were proceeded with Matlab. The appropriate wavelet packet functions and nodes corresponding to the distance sections were selected. The decomposition and reconstruction of wavelet packet were achieved by adopting DSP chip with powerful calculation ability. Then the distance information corresponding to the target was calculated by using FFT with 4096?point. Several The repeated experiments were conducted on the experiment platform of radar range?finding system for train connection, and the experimental results show that the range?finding accuracy can reach 0.2 m within the range of 0.5~10 m, and the range?finding accuracy can achieve 0.3 m within the range of 10~50 m.
Keywords: wavelet packet+FFT; FMCW radar; range?finding; train connection
0 引 言
在货运火车对接时,对测距系统有实时性和准确性的要求,为此,人们探索了很多算法来提高测距精度。有些算法虽然在提高测距精度上有很好的效果,但限于芯片运算速度和实时性要求,在应用上有一定的限制,用于测距系统的主要算法有FFT[1?3]、Chirp?Z变换[4?5]、ZOOM?FFT以及小波分析[6]等。本文主要是针对货运火车对接的FMCW雷达测距系统的测距精度问题,研究小波包+FFT算法(即采用FFT算法并增加FFT的点数来提高频率分辨率,采用小波包算法将噪声与信号分离),探索高精度火车对接FMCW雷达实时测距系统。
1 FMCW雷达测距主要算法分析
FMCW雷达测距算法主要是对雷达回波信号进行频谱分析,得到信号中包含的距离、速度等信息。快速傅里叶变换(FFT)是最基础、最常用的频谱分析方法,此算法简单、易实现,但在测距精度要求较高的系统中,必须增加FFT的点数才能提高频率分辨率,过多增加FFT的点数会引起较大的计算量从而减慢运算速度,与实时性有一定的冲突;Chirp?Z变换和ZOOM?FFT等算法都是通过细化频谱来提高频率分辨率,从而提高测距精度,这些算法在灵活性和处理速度上有很大优势,且研究较成熟,Chirp?Z变换在较低的信噪比下,测距精度会有所下降,尤其在较低的信噪比环境下,效果会有所下降[7]。因此,本文综合以前算法的优点,开发利用现有DSP强大的数据处理能力,研究小波包+FFT算法在提高货运火车对接测距系统精度的同时确保实时性。
2 小波包+FFT算法
2.1 FFT算法
FFT是离散傅里叶变换(DFT)的快速、高效算法,即把原有的[N]点序列分成较短的序列进行运算,再将这些序列的DFT组合起来得到原序列的DFT。FFT算法对信号进行频谱分析时,分析精度主要受制于泄漏效应与栅栏效应,而提高频谱的频率分辨率可以削弱泄漏效应和栅栏效应的影响。如何提高频率分辨率成为一个重要的任务。模拟信号必须经过A/D采集变成数字信号,而信号的采样率[fs](每秒采集的数据量)是由A/D采集时决定的。FFT频率分辨率的计算公式为[Δf=Nfs,]为了得到较高的频率分辨率,只能通过降低采样率或增加FFT的点数[N]达到。奈奎斯特采样定律规定,采样率不能无限降低,必须大于信号最大频率的2倍,否则会造成频谱混叠。因此本文采用增加FFT的点数[N]来提高频率分辨率。FFT测距算法中把信号[s(m)]的时间?幅值信息经过傅里叶变换转换成频率?幅值信息,根据频率信息算出距离。endprint
2.2 小波包算法
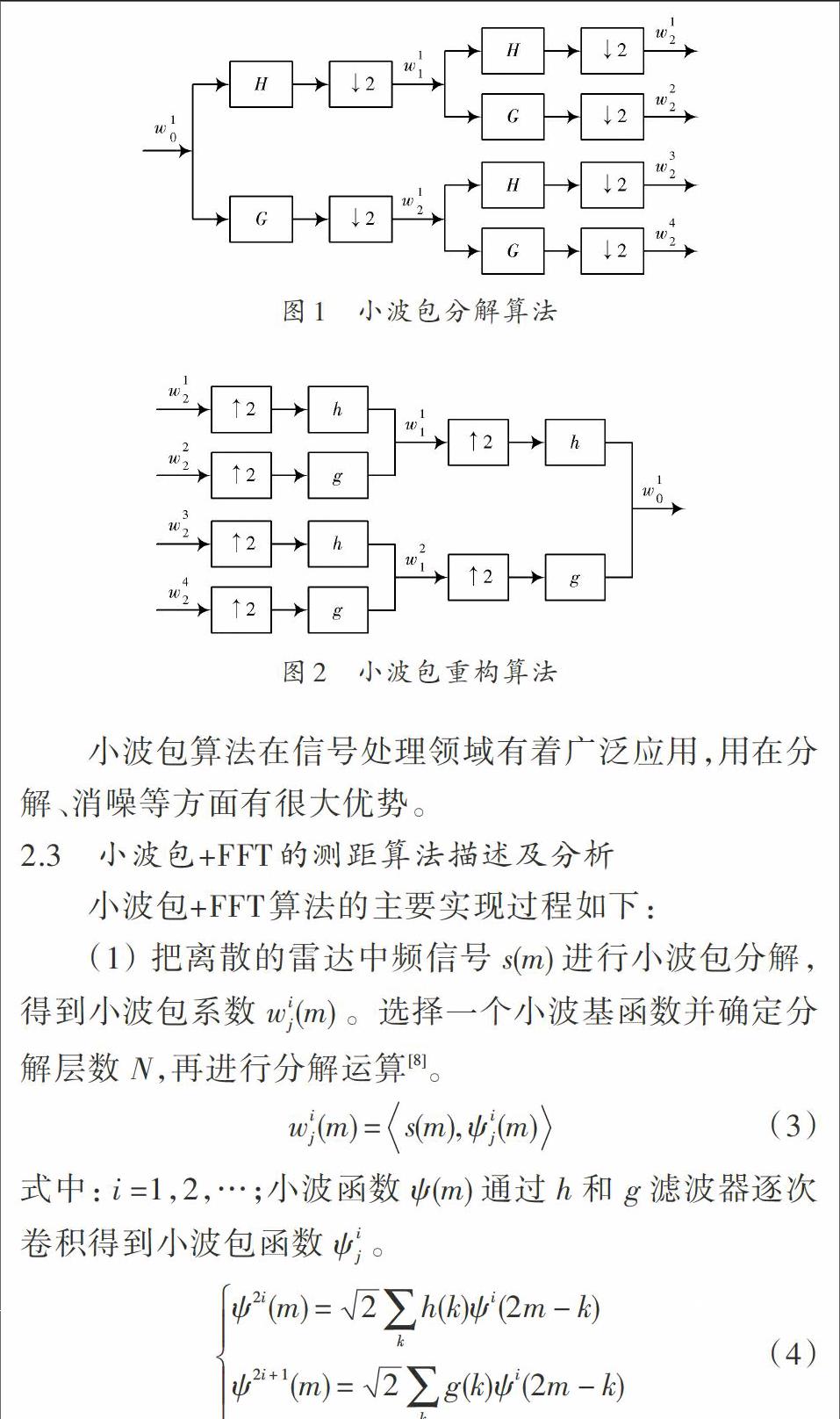
小波包算法在信号处理领域有着广泛应用,用在分解、消噪等方面有很大优势。
2.3 小波包+FFT的测距算法描述及分析
选取合适的小波函数是很重要的,不同的小波基函数得到的结果有很大差异。经过Matlab软件仿真及多次反复试验发现二阶的Daubechies小波函数(DB2)的计算结果比较准确。DB2小波函数不仅近似对称、正交,还具有紧支撑集[9]。确定分解层数,在不同的尺度下,信号和噪声呈现的特性是相反的,当尺度增大时,信号对应的小波系数是增大的,而噪声对应的系数却是减小的。在本算法中,确定做3层小波包分解。
(2) 单节点重构小波包的系数。小波滤波器决定了小波单节点的频带,而单节点小波滤波器的频域对应各节点小波包函数的频域。将雷达的有效作用距离划分为几段,计算出每段所对应的频带范围,选择对应的小波包系数,即选择合适的节点。假设信号的采样率为[fs,]通过[j]层小波包分解后被划分为[2j]个频段范围,第[k]个频段范围(即[(j,k)]节点)包含的频率范围是 [fs2j+1?k, fs2j+1?(k+1),]原始离散信号经过一次分解后,它的数据量点数就会减半,采样间隔扩大两倍,采样率降为原来的一半。这样,分解后,各个频带的序列长度会大大减少,仅仅保留该频带下的频率信息。
(3) 根据选择的小波系数重构该信号,得到单节点的重构信号[sij(m)],并进行4 096点的FFT。
3 小波包+FFT算法应用实现
小波包+FFT算法涉及的数据量大、运算量大,但火车对接时又不允许耗时太久,一般在火车对接过程中,要求完成一次运算的时间小于80 ms,因此必须选用处理速度快的处理器。经反复调研,选用TMS320VC5509A芯片实现小波包+FFT算法,其能够完成复杂的数字信号处理运算,该芯片处理速度快、运算能力强,其最大工作时钟为200 MHz(一个时钟周期为5 ns),选择增加4倍FFT点数+小波包的算法,需要2 225 779个时钟周期,约为12 ms。
本文选用的小波包+FFT算法所应用的系统为货运火车对接的FMCW雷达测距系统,采样频率[fs=125] kHz,时钟周期为5 ns,离散信号[s(m)]先经过小波包分解,分解为3层,根据频段信息分别选择[1,0],[3,0],[3,1]节点重构信号,再把重构信号经点数[N]为4 096的FFT得到频谱,再计算距离信息。小波包+FFT算法流程图见图3。
4 实验验证
4.1 火车对接雷达测距系统
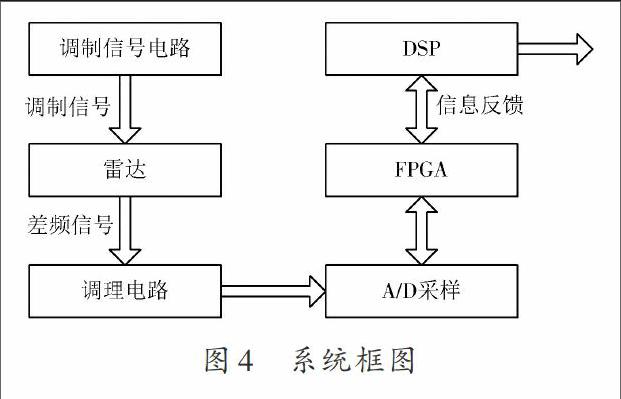
本文针对的货运火车对接过程中的雷达测距系统原理框图如图4所示,包括雷达传感器模块、调制信号产生电路、雷达信号调理电路、A/D采样电路等部分[10]。其要求测距范围是0.5~50 m,测距精度≤0.5 m,一个周期小于80 ms。在火车对接系统启动前,行驶速度小于10 km/h,火车会根据距离的减少而减速。
本文主要对FPGA输出的信号通过DSP处理,采用小波包+FFT算法测量距离信息。
4.2 实验过程
利用雷达传感器在实验室对固定目标进行检测。系统的作用距离是0.5~50 m,对应差频信号的频率为100 Hz~10 kHz。本文主要将有效作用距离分为3段,近距离(0.5~20 m),较远距离(20~37 m),远距离段(37~50 m)。近距离时,采用一层的小波包分解,较远距离和远距离采用三层小波包分解,根据小波包函数的频域特性,选择[w01,][w03,][w13]作为三段的小波包系数,即选择节点[1,0],[3,0],[3,1]。
图5是距离为15.65 m时未经处理的雷达差频信号,图6是经过一层小波分解后,用[1,0]节点重构的信号。雷达信号的噪声多集中在高频部分,用[1,0]节点重构的信号就滤除了高频成分,见图6。去噪后的信号经FFT处理后的频谱图见图7。由图7可知,差频信号的频率为3 165 Hz,算出的距离为15.88 m,绝对误差为0.23 m。
4.3 实验结果
该系统在实验室环境下进行测试,以精度为1 mm的华盛昌的激光测距仪(LDM?70)的测量结果为实际距离。在实验室环境下的测距结果如表1所示。在0.5~10 m范围内测距精度小于0.2 m;在10~50 m范围内,测距精度小于0.3 m,多次重复,最大误差都不超过0.3 m。
由表1可知,1 024点FFT算法测距误差大,并且目标小距离移动不能分辨,4 096点FFT算法比1 024点的FFT测距误差小,对距离变化较敏感。而小波包+4 096点FFT的算法既具备4 096点FFT的优点,又在其基础上减小了测量误差,提高了测距精度。
在现场测量时,会受环境干扰的影响,在0.5~10 m范围内,通常会增加0.1 m的误差(精度为0.3 m),在10~50 m范围内,现场通常会增加0.2 m的误差(精度为0.5 m)[11]。
因此,小波包+FFT的算法,应用于火车对接雷达测距系统中,测距精度高,实时性好。
5 结 论
本文针对火车对接过程中对距离测量的高精度和实时性的要求,设计实现了小波包+FFT算法,应用于火车对接雷达测距系统,并利用实验室已有的火车对接FMCW雷达测距系统验证,在确保实时性的同时,测距精度也有了较大提高。
注:本文通讯作者为唐立军。
参考文献
[1] 岳文豹.FMCW雷达测距系统的研究与实现[D].太原:中北大学,2013.
[2] 朱恺,秦轶炜,许建中,等.四种提高FMCW测距精度的方案及性能分析[J].无线电工程,2015,45(1):20?25.
[3] 侯盼卫,杨录,岳文豹.应用FFT的高精度FMCW雷达频率测量算法[J].自动化仪表,2014(3):17?19.
[4] 钟鹏.FMCW雷达近程测距系统的设计与研究[D].武汉:武汉科技大学,2014.
[5] YANG S Y, LI H, WU C, et al. 2?D harmonic retrieval in multiplicative and additive noise based on chirp Z?transform [J]. Signal Processing, 2012, 28(2): 33?37.
[6] 李华,高玉春,柳云雷.基于小波分析的低信噪比天气雷达回波弱信号提取[J].成都信息工程学院学报,2012(6):574?579.
[7] SCHERR S, AYHAN S, FISCHBACH B, et al. An efficient frequency and phase estimation algorithm with CRB performance for FMCW radar applications [J]. IEEE Transactions on Instrumentation and Measurement, 2015, 64(7): 1868?1875.
[8] 谭晓衡,周帅,黄振林.基于小波包的24 GHz LFMCW雷达测距方法[J].系统工程与电子技术,2013(3):522?526.
[9] 翟彦.小波分析理论在信号处理中的研究及应用[D].昆明:昆明理工大学,2010.
[10] 刘文.基于雷达测距的火车精确对接控制研究[D].长沙:长沙理工大学,2014.
[11] 刘文,刘斯,唐立军,等.火车对接测距系统中ZOOM?FFT应用研究[J].电子科技,2014(12):9?12.endprint
