狭窄安装环境下大行程升降机构的设计
2015-10-22陈麟曾显智耿爱农李辛沫王大承陈振杰
陈麟,曾显智,,耿爱农,李辛沫,王大承,陈振杰
狭窄安装环境下大行程升降机构的设计
陈麟1,曾显智1,2,耿爱农1,李辛沫1,王大承1,陈振杰2
(1. 五邑大学 机电工程学院,广东 江门 529020;2. 江门市汇霖电子科技有限公司,广东 江门 529085)
为满足狭窄安装环境下大行程升降机构的需求,本文设计了一种适配电动桌的紧凑型大行程升降机构,在传统螺杆/螺母升降副的基础上借助钢丝拉索机构实现了大行程两级升降,并借助分析软件ANSYS对该升降机构进行了稳定性分析. 样机运行实验表明:新型升降机构能在狭窄的筒柱状桌腿内进行配装并稳定运行,其升降比接近2.5:1,是同类采用传统螺杆/螺母升降机构的1.5倍;基于该新型升降机构的电动桌,其桌面可在至的高度区间内任意调节,其承重载荷可达,能满足该类产品的使用要求.
升降机构;紧凑型;大行程;电动桌
升降机构是能按要求沿指定方向升高或降低的装置[1-5],主要应用于升降平台、起重机构等机械装置中. 升降机构主要利用螺旋机构、液压装置、气动装置、折叠式收纳结构等来实现伸长或缩短,但传统的螺旋副升降机构升幅行程较小,液压装置则因携带液态油一般被禁止在室内使用,气动装置由于产生气源的压缩机存在噪声和振动而受到使用限制,折叠式收纳结构则需要较大安装空间,因此,对于一些需要安装在狭窄空间同时又需要较大行程的物件上,传统的升降机构难以满足要求. 鉴于此,本文以应用于电动桌的升降机构为例提出一种采用两级升降的紧凑型大行程升降机构,通过结构创新实现目标电动桌的大幅值升降.
1 升降机构的结构及工作原理
1.1 总体结构
该升降机构安装在桌腿内部的狭窄空间,实现桌子的自动升降(见图1). 其中桌腿由地脚、大筒、中筒和小筒组成,大筒与地脚相连、小筒与桌面相连. 升降机构的驱动有2种方案:方案1采用一个驱动电机(如图1-a),该电机被安装在桌板底面并通过同步带同时驱动两条桌腿内的升降机构,这种方案依靠机械精度保证两桌腿的同步升降,可靠性较好且成本相对低廉;方案2采用双电机驱动(如图1-b),即在每一条桌腿内均设置一个电机,每个电机单独驱动所配升降机构,这种方案依赖控制设计来确保两桌腿的同步升降,其特点是对电控部分要求较高,但是由于每条桌腿及其升降机构为独立部件,在生产、运输、装配等方面均具有较大优势,是目前国外电动升降桌采用的主流方案.

a.单电机同步带方案 b.双电机方案
该升降机构结构如图2所示,其组成部分有螺杆、螺母、滑块、钢丝拉索、滚轮、U型槽板、上导块、下导块、锁紧块、背板和底板等. 螺杆与螺母转动配合并构成传统的升降单元,其中螺母支撑在U型槽板的一端,螺杆的下端连接有滑块,螺杆转动时滑块跟随移动并受U型槽板的直线约束. 在U型槽板的两端各配装有一对滚轮,钢丝拉索紧绷地套装在滚轮的环形凹槽内并形成周长不变的环形回路,钢丝拉索的某个部位被紧定连接在滑块上并跟随滑块一起运动,钢丝拉索的另一部位紧固连接在锁紧块上而成为不动端,所述锁紧块与背板的上端紧固连接. 由滑块、钢丝拉索、滚轮、U型槽板、背板和锁紧块构成第二级升降单元. 上述升降机构被配装在大筒、中筒和小筒内. 其中大筒与底板紧固连接,中筒内嵌在大筒之内,中筒的外壁面与大筒的内壁面组成滑动导向升降副,中筒与下导块连接并跟随该导块一起运动;小筒内嵌在中筒内,小筒的外壁面与中筒的内壁面组成滑动导向升降副,小筒与螺杆一起运动.

a.正面 b.背面
1.2 工作原理
新型升降机构采用电机驱动. 电机的输出端经过减速装置后或直接与螺杆上端连接、或通过同步带间接与螺杆上端连接. 螺杆与螺母螺旋配合,当螺杆转动上升时,螺杆会相对于螺母产生轴向位移,从而形成第一级伸长;与此同时,螺杆的下端带动滑块一起移动,进而由滑块带动钢丝拉索移动;当钢丝拉索移动时,由于其被紧固在锁紧块上,此时安装在U型槽板下端的滚轮成为动滑轮并被钢丝拉索拉抬,从而将U型槽板向上抬升,于是U型槽板相对于背板产生升降位移,由此形成第二级伸长,于是桌面在上述两级伸长的驱动作用下被逐步抬高. 同理,当电机反转时螺杆亦反转,此时螺杆、U型槽板和背板处在收缩状态,桌面随之下降. 注意到螺母与U型槽板一起运动,因此是螺杆、U型槽板和背板的长度构成了本机构的升降空间,其中小筒跟随螺杆一起运动、中筒跟随U型槽板一起运动、而大筒则与背板固定不动,升降机构工作时小筒相对于中筒、中筒相对于大筒均有升降动作,同时这三大筒件还起到装饰的作用. 图3是螺杆外伸时螺杆、U型槽板、背板形成相对升降的状态图. 可以看到,除去必要的安装和导向空间,本文设计的升降机构的升降比接近2.5:1,几乎是同类采用传统螺杆/螺母升降机构的1.5倍.

升降最短 升降最长
1.3 设计要求
为了保证升降机构在运转过程中达到平稳静音的效果,本设计考虑了下面几点细节:1)导块采用塑料制作,并在不影响机构升降行程的前提下尽可能增加其导向长度;2)在钢丝与滑块接触点以及钢丝与锁紧块连接点处设置有调整铜片,铜片的良好延展性可在受压力情况下产生一定范围的形变,不仅可以增大零件间的接触面积和摩擦力,也减轻了受力部件的应力,从而可以很好地削减应力集中;3)机构的大筒与中筒、中筒与小筒之间的间隙采用环状塑料片填充,该设计可减小运转过程中产生的晃动,同时也具有除噪功能.
1.4 主要设计参数
针对目标产品的特定要求给定设计参数如下:1)电动桌上极限高度为,下极限高度为,桌板厚度为;2)桌面承载荷:单边最大载荷;3)升降速度:;4)同步控制:两桌腿同步升降,当高差超过时自动修正;5)桌面水平度:桌面最大倾角小于;6)高度显示:升降同时显示当前高度;7)位置记忆:至少2个常用高度记忆;8)过载保护:当加载过大时能自动断电保护;9)极限位置通断保护功能:运行到上、低下极限高度时,自行通断;10)复位功能:遇突然断电,启动后能续点运动;11)遥控操作.
需要说明的是,升降系统采用霍尔传感器作为极限位置通断元件以,其原理为:在升降机构的开始和终止极限位置分别安装小型永久磁铁,在相对升降机构静止的外筒内壁布置霍尔传感器. 当机构运动到指定位置时,霍尔传感器在磁场作用下产生霍尔电压,经集成电路中的放大器放大形成较强的输出信号并把该信号传送到控制系统,再由控制系统驱动实现电源的断开,从而保护机构与电源,同时在极限位置的时候对高度显示进行清零处理以消除两桌腿在运行当中产生的累积误差.
2 新型升降机构稳定性分析
在运行过程中,各组成件的变形及振动对机构的运动稳定性影响较大. 为分析升降机构的稳定性,本文借助工程仿真软件ANSYS[7]对其进行有限元仿真计算. 在SOLIDWORKS软件中建好模型,转化成.X_T文件导入ANSYS中[8]. 升降机构的稳定性主要由螺杆、U型槽板和背板等3大主要受力部件决定. 为了简化分析过程以提高处理效率,在前处理中对U型槽板等3个部件直接采用危险截面建模. 零件材料均为45号钢,在常温状态下其弹性模量为,密度为,强度极限为,泊松比是0.269. 定义完单元属性后,采用SOLID285单元划分网格自动产生有限元模型,其中螺杆共划分个节点和个单元,U型槽板共划分个节点和个单元,背板共划分个节点和个单元. 螺杆与螺母螺旋配合,受到轴向最大载荷. 螺母与U型槽板连接,由于力的传递性,U型槽板主要受到钢丝拉索的预紧力以及桌面载荷作用,其轴向载荷约为,背板主要受桌面承载荷作用,其轴向载荷约为. 将各零件所受载荷及约束施加到有限元模型当中后用求解器求解模型,得出螺杆、U型槽板和背板模型中最大应力依旧远远小于材料的许用应力,即该升降机构满足强度条件. 与上述设计过程中得出的结果相符,该升降机构强度足够.
设置Analysis Type为Modal. 采用SOLID285单元划分网格自动产生有限元模型,利用ANSYS软件提供的分块Lancados法(缺省提取法)对升降机构中螺杆、U型槽板和背板模型进行模态计算,则各零件模型的五阶固有频率如表1所示.
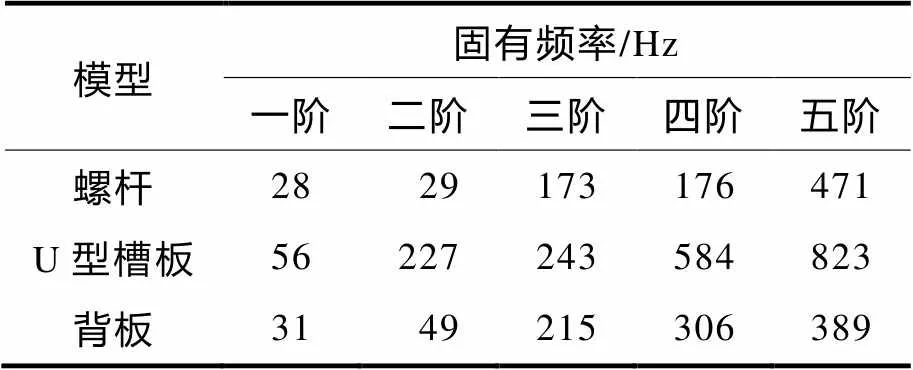
表1 升降机构关键零部件固有频率
3 结束语
本文设计了一种新型大行程升降机构,在传统螺旋升降机构的基础上,借助绳索拉伸装置使机构的升降幅度得以大幅拓展,其升降比几乎达到传统螺旋升降比的1.5倍,实现了电动桌大升降比的升降幅值要求. 该升降机构方案合理,结构紧凑,尤能适配一些安装环境狭窄的产品上,应用范围较广. 该新型升降机构已经做出样机,实际应用情况表明,该机构能够达到预期的升降幅度,并能可靠稳定地运行. 与设计初设想基本符合,由此证实了该机构方案的可行性.
[1] 吴义成. 伸缩机构的研究与设计[J]. 机电工程技术,2013, 42(9): 115-117.
[2] 石勇,殷国富. 多层螺旋伸缩机构原理及其动态仿真技术的研究[J]. 计算机应用技术,2005, 32(05): 25-27.
[3] 郑红,吴国锐. 起重臂伸缩机构原理的研究[J]. 煤矿机械,2010, 31(6): 69-71.
[4] 胡静,薛艳敏. 家居产品的改良设计研究[J]. 机电产品开发与创新,2011, 24(3): 71-72.
[5] 黄银才,杨秋鸽. 螺栓安装器可伸缩机构设计与使用[J]. 机电产品开发与创新,2010, 23(1): 58-59.
[6] 机械设计手册编委会. 机械设计手册新版(第2卷)[M]. 北京:机械工业出版社,2004.
[7] 康国政. 大型有限元程序的原理、结构与使用[M]. 成都:西南交通大学出版社,2004.
[8] 王富耻,张朝辉. ANSYS10.0有限元分析理论与工程应用[M]. 北京:电子工业出版社,2006.
[责任编辑:韦 韬]
Design of Large Travel Lifting Mechanism to Be Installed in a Narrow Environment
CHENLin1, ZENGXian-zhi1,2, GENGAi-nong1, LIXin-mo1, WANGDa-cheng1, CHENZhen-jie2
(1. School of Mechanical and Electrical Engineering, Wuyi University, Jiangmen 529020, China;2. Jiangmen Hui Lin Electronic Technology Co. Ltd., Jiangmen 529085, China)
In order to meet the requirements of large stroke lifting mechanisms to be installed in a narrow space, this study designs a compact large stroke lifting mechanism suitable for electric tables. On the basis of conventional screw / nut lifting pair, large travel two-stage lifting is achieved using a wire cable mechanism. An analysis of the stability of the lifting mechanism is made using the software ANSYS. The prototype running testing shows the new lifting mechanism can be installed in the narrow cylinder-shaped table legs and runs stably. The lifting ratio is close to 2.5:1 and is 1.5 times of the conventional screw / nut lifting mechanism; the tabletop of the electric table fitted with the lifting mechanism can be adjusted at random between the height of 700 mm and 1700 mm, and its bearing load can be up to 1500 N and can meet the requirements for such products.
lifting mechanisms; compact types; large stroke; electric tables
1006-7302(2015)01-0054-05
TG502.3
A
2014-09-28
2014年广东省本科高校教学质量与教学改革工程—大学生实践教学基地项目【粤教高函[2014]97】;五邑大学本科“3+1”培养模式综合实验班毕业设计课题.
陈麟(1990—),男,江西吉安人,在读硕士生,研究方向为机械设计;耿爱农,教授,硕士,硕士生导师,通信作者,研究方向为发动机节能减排技术、发动机中气体流动数值计算分析以及压缩机减摩技术与密封结构.