极紫外相机电控单元的设计与实现
2015-10-22王永成
刘 冰,王永成
(1.长春工业大学计算机科学与工程学院,吉林长春130012;
2.中国科学院长春光学精密机械与物理研究所,吉林长春130033)
极紫外相机电控单元的设计与实现
刘 冰1,王永成2∗
(1.长春工业大学计算机科学与工程学院,吉林长春130012;
2.中国科学院长春光学精密机械与物理研究所,吉林长春130033)
为了实现对极紫外相机控制及管理功能,设计并实现了一种基于FPGA的电控单元.该系统以FPGA为核心,经过RS-422接口与信号处理子系统进行通讯,通过LVDS接口接收信号处理子系统发送的科学数据,与CPU之间通过数据总线进行通讯.为了提高电控单元的可靠性,在设计过程中采用了抗辐照设计和交叉备份的冗余设计.通过极紫外相机电控单元的测试和试验验证表明:极紫外相机电控单元的功能和性能满足指标要求,为极紫外相机在轨取得圆满成功的结果起到了重要作用.
极紫外相机;电控单元;FPGA
1 引 言
极紫外相机是安装于嫦娥三号着陆器上的一个重要有效载荷,主要负责对地球周围等离子体层产生的波长为30.4 nm的辐射进行全范围、长期的观测研究[1-2],它对于地球大气和空间天气研究具有非常重要的意义.
极紫外相机需要对地球等离子体层的整个轮廓成像,并监测其空间分布和变化,为此极紫外相机实设计了较大的视场和较高的角分辨率;同时,极紫外相机设计了方位和俯仰转动机构以实现对地球的对准和跟踪功能;嫦娥三号着陆器在月球表面着陆后会产生大量的月尘,为了避免月尘对相机的光学系统造成污染,设计了镜头盖防护机构,镜头盖机构采用双绕阻步进电机进行驱动[3-4].
月球环境具有强辐射、高温差的特点,其中月昼的最高温度达到127℃,而月夜的最低温度则低至-183℃,同时着陆器着陆时会受到较大的冲击[5-7],加之探测器总体对载荷重量和功耗的严格限制使得月基极紫外相机的设计难度大大提升.上述的种种约束条件使得极紫外相机电控单元与低轨卫星有效载荷的电控单元相比设计时在满足其常规的功能和性能指标的基础上,还需要在抗辐照、EMC、轻量化、低功耗、高可靠等方面进行设计.受制于火箭及卫星运载能力的限制以及卫星能源的约束,探月载荷与常规卫星载荷相比,对其轻量化和低功耗的要求更高,这就要求极紫外相机电控单元在满足高可靠的条件下尽可能采用高集成的设计手段来减轻重量和降低功耗,极紫外相机电控单元与低轨卫星相同规模的有效载荷电控单元相比,其重量降低约50%,功耗下降约30%.本文结合极紫外相机电控单元的研制过程,详细阐述其结构框架及工作原理、系统的实现和在工程中的验证结果.
2 电控单元构成及工作原理
为了实现轻量化和低功耗的设计目标,有效载荷分系统将各载荷的公用单元进行了集成化设计,通过公用单元实现对各载荷电子学单元的供电及任务调度功能,各载荷电子学单元根据公用单元的综合调度实现对各自载荷的任务安排及控制功能.有效载荷公用单元和各载荷的电子学单元集成后安装在载荷电控箱中,该设计较以往的各载荷单独使用供电和控制的设计相比重量减轻了70%,功耗降低了50%.
极紫外相机电控单元的原理框图如图1所示,除了开关机控制电路、主备切换控制电路、俯仰电机和方位电机驱动电路之外的其余电路都采用了冷备份设计,电控单元和有效载荷公用单元的CPU接口之间采用交叉备份的设计.电控单元以FPGA为核心,根据有效载荷公用单元的调度完成对极紫外相机的控制和综合管理功能,接收并执行有效载荷公用单元发送的扩展指令使其开机/关机或者处于主份/备份状态;极紫外相机的电源由有效载荷公用单元提供再经电控单元二次稳压后为其它电路供电,电控单元将采集到的7路模拟量遥测信号和6路开关量遥测信号发送给有效载荷公用单元,由其处理后通过1553B通讯总线下行,用户可以通过这些遥测量判断极紫外相机的工作状态是否正常.极紫外相机电控单元通过RS-422接口与成像单元进行通讯,波特率为62.5 kbps;电控单元通过LVDS接口接收成像单元发送的科学数据,其时钟频率为5 MHz.
FPGA作为电控单元的核心,主要完成与有效载荷公用单元CPU之间的信息交互功能,内部各功能单元的地址分配及译码功能,对镜头盖电机、俯仰电机和方位电机的控制功能,6路霍尔传感器的状态采集及相关控制功能,与成像单元之间的RS-422通讯和数传功能,图像数据的缓存及图像坐标的计算功能,为CPU产生中断状态寄存器及外部中断功能,产生表征FPGA工作状态的心跳信号功能.
3 电控单元的设计与实现
极紫外相机电控单元原理框图如图1所示,极紫外相机电控单元接收到载荷电控箱所发送的主备切换指令和开关机控制指令后进行相应的主备切换和开关机控制功能.当极紫外相机电控单元上电后,FPGA开始进行程序加载,加载成功后对其各单元进行初始化操作,运行在载荷电控箱CPU上的极紫外主控软件部件根据地面注入的指令对FPGA进行访问,以控制极紫外相机完成各类探测任务并读取极紫外相机的各类遥测状态和工程参数,以此判断极紫外相机的工作状态.
极紫外相机电控单元FPGA接收到极紫外主控软件部件所发送的指令后,分别控制打开镜头盖,方位机构和俯仰机构转动到预定位置,与成像单元进行通讯发送测量命令和测量时间以及高压电源的控制参数.当极紫外相机通过数传总线接收到成像单元所发送的科学数据后,对其进行数据缓存和坐标计算,并将计算结果发送给极紫外主控软件部件,由其实现坐标计数功能.
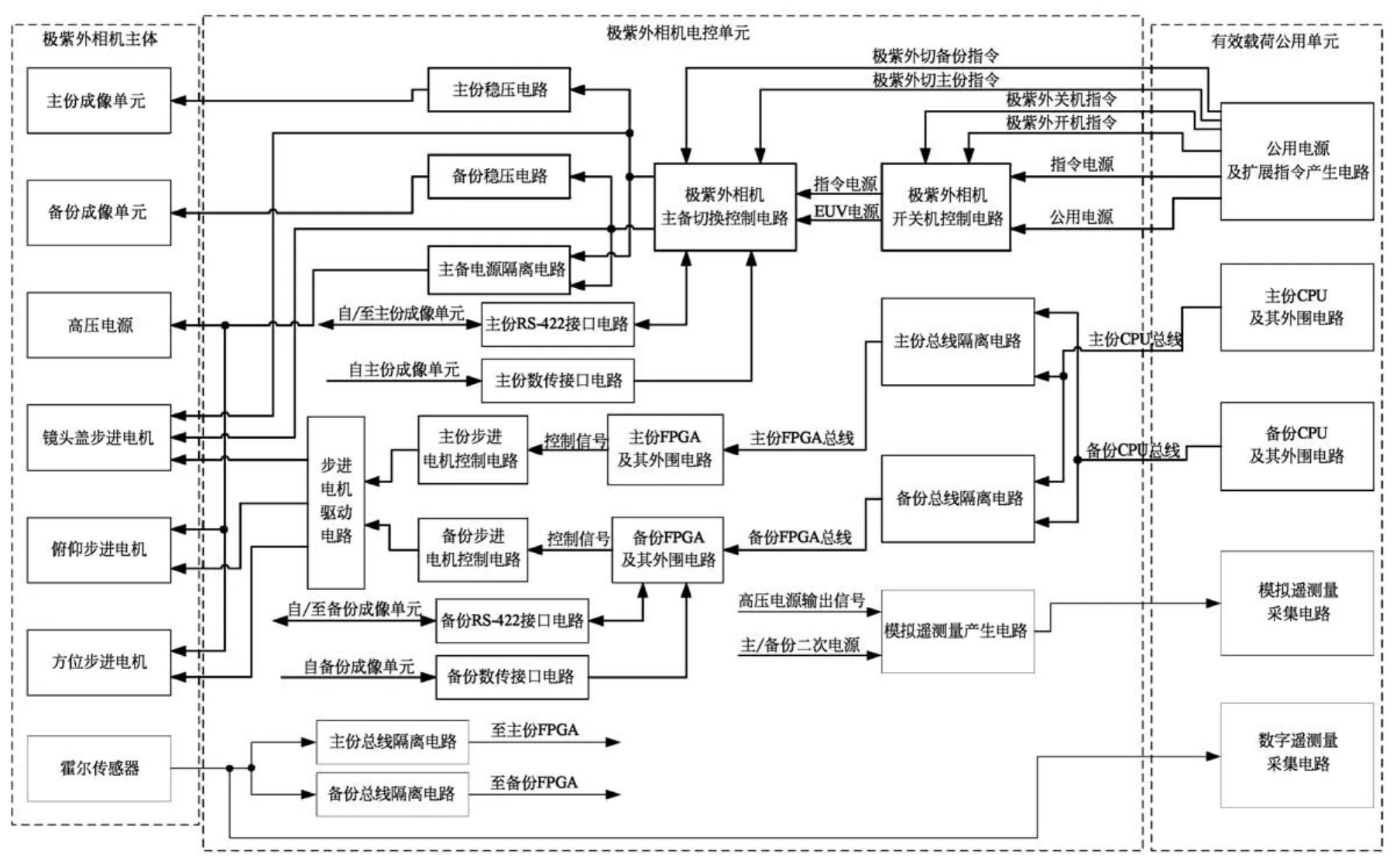
图1 电控单元原理框图Fig.1 Schematic diagram of control unit
3.1硬件系统的设计与实现
极紫外相机电控单元的FPGA采用了XILINX公司生产的型号为XQR2V3000-4CG717V的抗辐照产品,其内部具有3 000 000个逻辑门,14 336个Slices,1 728 Kb的RAM,12个DCM,8个I/O块,516个用户I/O,这些丰富的资源为本系统的实现提供了基础.同时还具有不低于200 krad(Si)的抗辐照总剂量能力和160 Me V-cm2/mg的抗单粒子锁定能力,确保其在月面强辐照环境下的生存能力[9].FPGA的配置芯片也采用了XILINX公司生产的型号为XQR17V16CC44V的抗辐照级PROM,可以存储16 Mbits的配置位流.FPGA的配置电路如图2所示,由于该款FPGA抗单粒子翻转的能力较弱,为了降低FPGA发生单粒子翻转事件的概率,采用了三模冗余和定时重加载的策略,所谓定时重加载,即每当主控软件部件对镜头盖步进电机、俯仰步进电机或方位步进电机进行控制前,对FPGA发送重加载命令,FPGA收到重加载命令后从其配置芯片读取程序进行重加载操作,以此避免FPGA由于发生单粒子翻转事件而造成的控制错误.
为了提高系统的可靠性,极紫外相机电控单元的FPGA电路和载荷电控箱的CPU之间采用了交叉备份的设计方案,如图1所示,即载荷电控箱的主份CPU既可以和极紫外电控单元的主份FPGA进行通讯,也能与其备份FPGA进行通讯.为了实现该功能,需要对载荷电控箱的CPU和电控单元的FPGA之间的数据总线、地址总线及控制总线进行隔离设计以避免相互之间的潜通路.CPU总线隔离电路如图3所示,采用型号为SNV54LVTH162245WD的总线收发芯片作为隔离芯片使用,该芯片在其输出使能(OE)引脚为高电平时,其输出总线与输入总线隔离,且输出总线为高阻态;同时当芯片处于上电或下电状态时,其输出总线也处于高阻态从而确保不发生总线冲突.基于该芯片的上述特点,可以将其作为总线隔离芯片应用于冷备份电路,如图3所示,代号为D20和D24的芯片由主份+3.3 V电源供电,其B总线皆与极紫外电控单元的主份FPGA连接,D20的A总线与载荷电控箱的主份CPU数据总线连接,D24的A总线与载荷电控箱的备份CPU的数据总线连接,D20的输出使能端(OE)与方向控制端(DIR)皆由主份CPU控制,D24的输出使能端(OE)与方向控制端(DIR)皆由备份CPU控制,当极紫外电控单元的主份电路上电时,若载荷电控箱主份CPU工作,则D20的输出使能端和方向控制端有效从而实现与主份FPGA的信息交互,此时D24的输出使能端为高电平,其A总线和B总线相互隔离,从而实现了主份CPU与主/备份FPGA之间的交叉备份.
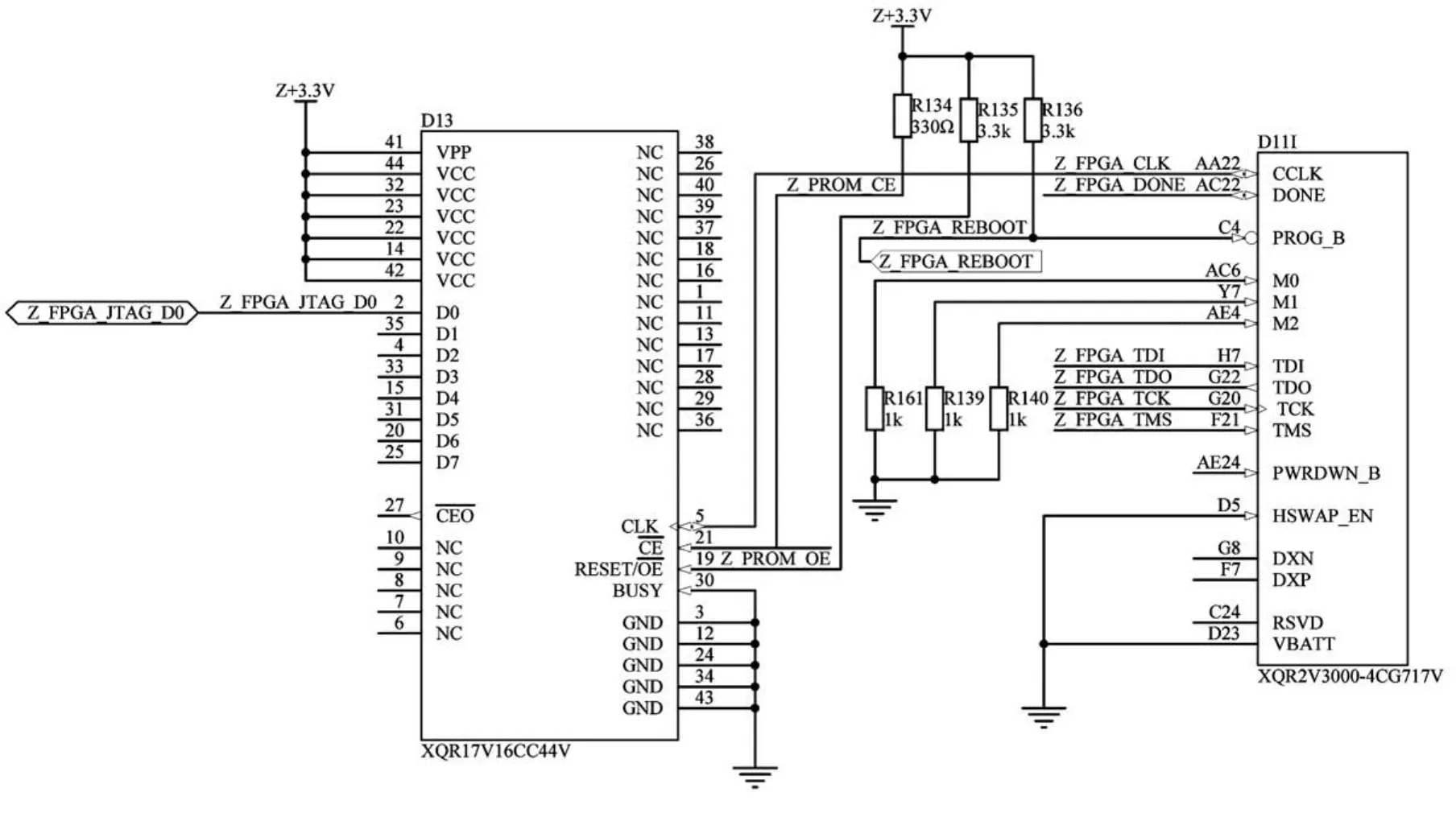
图2 FPGA配置电路图Fig.2 Configuration diagram of FPGA
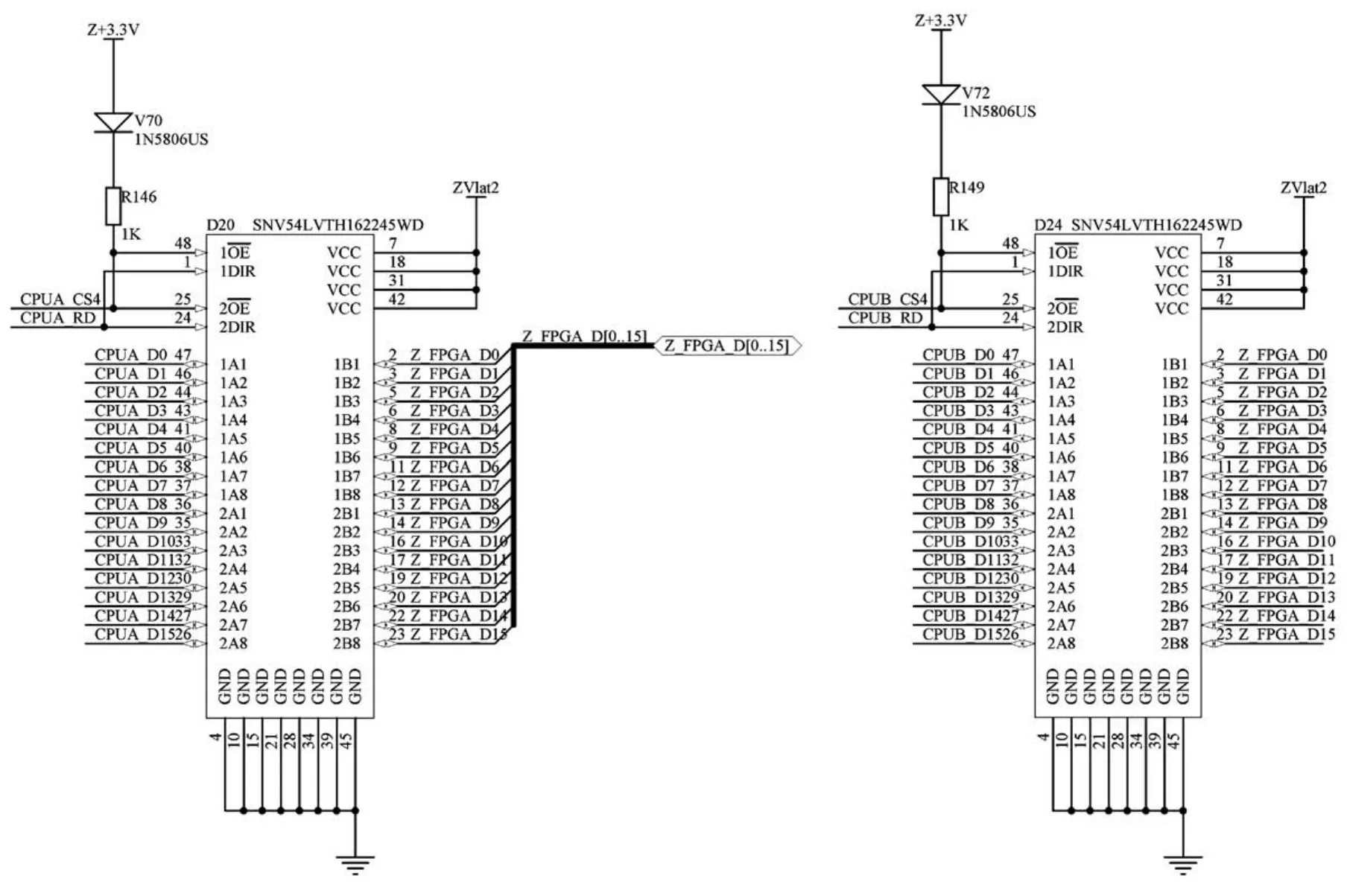
图3 CPU总线隔离电路图Fig.3 Diagram of CPU bus
3.2软件系统的设计与实现
极紫外相机电控单元的软件由主控FPGA软件和极紫外主控软件部件构成.主控FPGA软件的功能框图如图4所示,图中时钟管理模块负责接收外部晶振所提供的时钟信号,并对其进行处理后向其他模块提供时钟信号和全局复位信号,同时还向遥测电路提供周期为3 s的FPGA心跳信号作为模拟遥测量表征FPGA的工作状态.地址分配模块负责接收载荷电控箱提供的地址信号,对其进行地址译码,产生各功能单元的地址译码信号.中断状态寄存器表征各类中断源的状态,当CPU接收到外部中断时,通过读取中断状态寄存器的值以确定中断源.步进电机控制模块接收CPU发送的步进电机控制数据,然后产生相应的脉冲信号控制镜头盖步进电机、方位步进电机和俯仰步进电机运行.高压电源控制模块接收到CPU发送的控制指令后产生脉冲宽度为(80±10)ms的正脉冲信号,以此控制高压电源的输出和禁止.数传通讯模块负责接收信号处理子系统所提供的数传通讯时钟信号、数据信号和使能信号,然后产生数据有效信号发送至摄像模式选择模块.RS-422通讯模块负责与信号处理子系统之间的RS-422通讯,向信号处理子系统发送各类命令和参数,同时接收信号处理子系统返回的工程参数.摄像模式选择模块接收CPU发送的命令,并对命令进行解析确定所采取的摄像模式,然后产生相应的使能信号和数据有效信号发送给原始数据存储模块和坐标值存储模块.原始数据存储模块包含两块1k×12 bits的FIFO,采用乒乓控制方式将摄像模式选择模块输出的原始数据进行存储,当其中的1块FIFO存满时产生原始数据中断信号输出给中断状态寄存器.坐标值计算模块接收摄像模式选择模块提供的原始数据,根据坐标值计算公式计算出坐标值X、Y并同时产生坐标值有效信号输出给坐标值存储模块.坐标值存储模块功能与原始数据存储模块功能相同,区别只在于坐标值存储的数据是通过坐标值计算模块得到的坐标值而非原始数据.状态参数模块将主控FPGA的状态参数和信息处理子系统所产生的工程参数打包后发送给载荷电控箱CPU.
极紫外主控软件部件主要完成通过1553B通道所数据注入的接收和处理,对镜头盖电机、俯仰电机和方位电机的控制,科学数据的采集和处理,并通过RS-422通道向信号处理子系统发送高压电源的设定值、探测器阈值以及图像校正参数,同时还负责工程参数的采集、存储和打包功能.
3.3可靠性设计
由于月球表面恶劣的空间辐射环境,需要重点考虑单粒子防护设计,避免SEU和SEL现象的发生,或者尽量降低可能发生的SEU和SEL带来的危害程度,保护系统,极紫外相机电控单元抗辐射设计方面的具体措施如下:
(a)依靠箱体材料的选取、箱体厚度和箱体的密封性实现整机总剂量防护;
(b)选用抗辐射性能强或对辐射不敏感的元器件;
(c)对CMOS芯片电源端串联限流电阻的措施来提高芯片的抗闩锁能力;
(d)对FPGA进行三模冗余设计和定时重加载设计,以此避免FPGA发生SEU事件;
(e)采取容错设计和EDAC设计手段,提高系统的安全性.
极紫外相机单机分配给极紫外相机电控单元的可靠度是0.994(在1年寿命期内),根据前述极紫外相机电控单元的功能框图,构建其可靠性框图和可靠性模型,可靠性框图如图5所示,可靠性模型为:

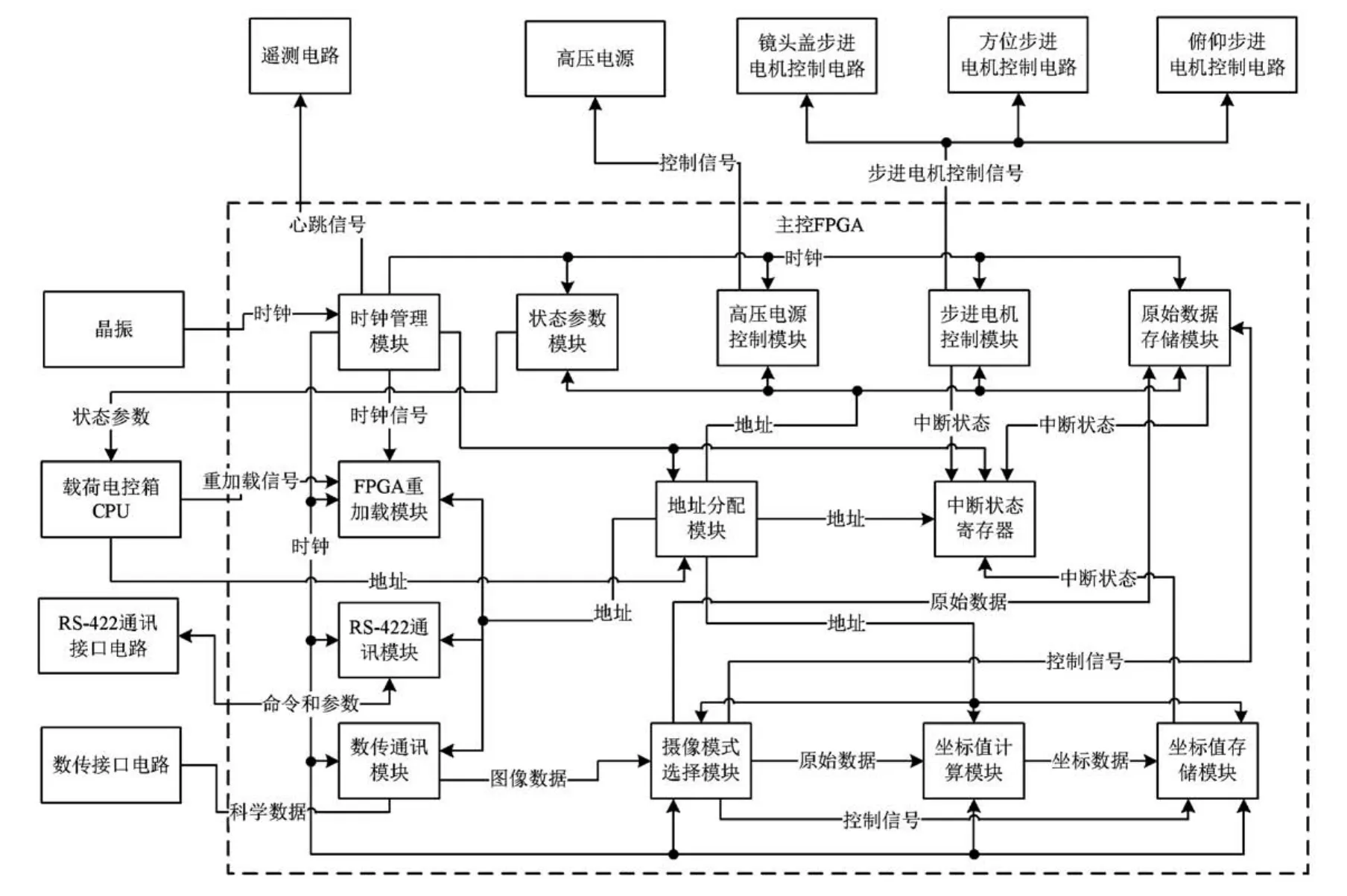
图4 FPGA功能框图Fig.4 Function diagram of FPGA
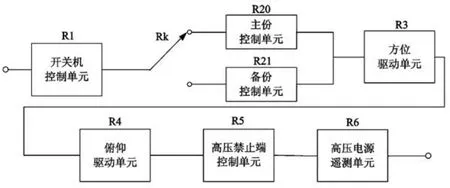
图5 可靠性框图Fig.5 Reliability diagram
4 验证与实验
极紫外相机电控单元经过硬件系统的设计和软件系统的设计后形成了图6所示的线路板,并对其功能和性能进行了充分的测试,在地面测试阶段先后进行了单板调试、子系统测试、系统级联试、高温存储试验、热真空试验、力学试验、老练试验等各类环境试验和可靠性验证试验.在这些测设和试验过程中,极紫外相机电控单元的各项功能和性能得到了充分的验证,同时也确保了其在轨运行的可靠性.
2013年12月2日嫦娥三号探测器成功发射升空,2013年12月15日着陆器和巡视器成功分离后,极紫外相机也正式开启了其月球之旅,在随后的各类测试中,极紫外相机取得了大量的科学探测成果,极紫外相机电控单元作为其重要组成部分,也成功的完成了各项功能,取得了圆满成功.
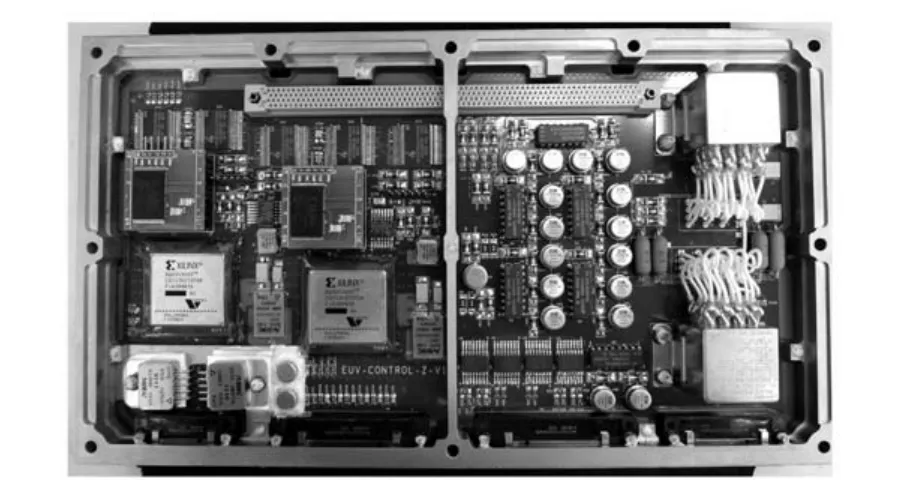
图6 线路板实物照片Fig.6 Photo of printed circuit board
5 结 论
本文介绍了极紫外相机电控单元的构成和工作原理,对其进行了硬件系统的设计和软件系统的设计,并对其地面测试和试验验证以及在轨验证的情况进行了介绍.极紫外相机作为世界上首台在月面对地球等离子体层进行观测的科学仪器已取得了圆满成功,极紫外相机电控单元作为其重要组成部分,在轨工作期间圆满完成了其各项功能,性能指标达到设计要求,充分证明了其设计的合理性和高可靠性.
[1] 何飞,张效信,陈波,等.地球等离子层极紫外波段辐射特性计算[J].中国科学,2010,40(1):71-76.
He F,Zhang X X,Cheng B,et al.Calculation of the extreme ultraviolet radiation of the earth's plasmasphere[J]. Sci.China Tech.Sci.,2010,40(1):71-76.
[2] 王智.基于碳纤维复合材料的月基极紫外相机照准架结构设计[J].中国光学,2012,5(6):590-595.
Wang Z.Design of collimation frame structure for lunar-based extreme ultraviolet camera on carbon fiber reinforced plastics[J].Chinese Optics,2012,5(6):590-595.
[3] 李朝辉.月基对地观测极紫外相机光机结构设计[J].仪器仪表学报,2010,31(10):2352-2356.
Li Z H.Opto-mechanical design of lunar based EUV camera for imaging the earth[J].Chinese Journal of Scientific Instrument,2010,31(10):2352-2356.
[4] 王智,李朝辉.月基极紫外相机光机结构设计[J].光学精密工程,2011,19(10):2427-2433.
Wang Z,li Z H.Design of optical-mechanical structure for lunar-based extreme ultraviolet camera[J].Optics and Precision Engineering,2011,19(10):2427-2433.
[5] 欧阳自远,李春来,邹永廖,等.我国月球探测一期工程的科学目标[J].航天器工程,2005,14(1):1-5.
Ouyang Z Y,Li C L,Zou Y L,et al.The scientific object of the first phase project of Chinese lunar exploration[J]. Spacecraft Engineering,2005,14(1):1-5.
[6] 叶培建,孙泽洲,饶炜.嫦娥一号月球探测卫星研制综述[J].航天器工程,2007,16(6):9-15.
Ye P J,Sun Z Z,Rao W.Research and development of change-1[J].Spacecraft Engineering,2007,16(6):9-15.[7] 卜彦龙,唐歌实,王美.面向探月卫星景象导航的局部基准图制备[J].光学精密工程,2012,20(8):1838-1845.
Bu Y L,Tang G SH,Wang M.Preparation of local base map for lunar orbiter scene matching navigation[J].Optics and Precision Engineering,2012,20(8):1838-1845.
[8] 陈莹,朱明.多子直方图均衡微光图像增强及FPGA实现[J].中国光学,2014,7(2):,225-233.
Chen Y,Zhu M.Multiple sub-histogram equalization low light level image enhancement and realization on FPGA[J].Chinese Optics,2014,7(2):225-233.
Design and implement of extreme ultraviolet camera electronic control unit
LIU Bing1,WANG Yong-cheng2∗(1.School of Computer Science and Engineering,Changchun University of Technology,Changchun 130012,China;2.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China)
In order to control and manage extreme ultraviolet camera,the electronic control unit based on FPGA is designed.This system adopts FPGA as processing and control core.It communicates with signal processing subsystem through RS-422 and receives science data with LVDS.It communicates with CPU through data bus.The radiation-hardened and cross backup redundancy design is adopted in order to improve the reliability of the system.The electronic control unit tests for extreme ultraviolet camera show that the function and performance of extreme ultraviolet camera are qualified. It plays an important role for extreme ultraviolet camera in-orbit operation.
extreme ultraviolet camera;electronic control unit;FPGA
TN919.5
A doi:10.3788/YJYXS20153006.0972
1007-2780(2015)06-0972-07
刘冰(1978-),男,吉林长春人,硕士,讲师,2001年毕业于长春工业大学获得学士学位,2008年毕业于长春工业大学获得硕士学位,从事数据挖掘、数据分析方向的研究,以及本科数据结构课程教学工作. E-mail:39352307@qq.com
王永成(1980-),男,甘肃嘉峪关人,博士,副研究员,硕士生导师,2003年毕业于吉林大学获得学士学位,2010年毕业于中国科学院研究生院,获得博士学位,主要从事嵌入式系统设计和可靠性工程方面的工作. E-mail:wyc_dyy@sina.com.
2015-05-08;
2015-06-15.
探月工程二期
Supported by Chinese Lunar Exploration Project
∗通信联系人,E-mail:wyc_dyy@sina.com