基于GPS技术的飞行器安全控制系统设计
2015-10-08张伟姜娜张朝阳
张伟 姜娜 张朝阳
【摘 要】为保证地面重要军事设施在飞行试验中的安全,确保飞行器飞行在预定区域,在飞行器上安装高可靠性的“安全控制设备”势在必行。介绍了一种运用GPS技术确保飞行器始终飞行于预定安全区域的自动控制系统。本设计利用硬件和软件功能相互结合,做了全面的可靠性设计,大大提高了使用安全性。
【关键词】飞行器;安全控制系统;设计
0 引言
飞行器在飞行试验中,不仅要考虑设计穿越飞行中的预定航路,还要为性能下降或失效等突发状况做尽可能多的防范。随着经济的迅速发展,在试验航区内的保护目标也逐渐增多,对安全控制的范围和可靠性要求也不断提高,以确保飞行器在预定的区域内飞行[1-2]。
本文提出一种安装于飞行器上用于提供安全保障的嵌入式安全控制系统,主要监控飞行器是否按预定安全区域飞行,实时监测飞行器的飞行工作状态和运行轨迹。当判定飞行器偏差较大或严重失控时,及时发出修偏校正或自毁操控等指令,保证试验航路中设施免受飞行器威胁。
1 总体设计方案
本系统由安控计算机、GPS接收机组成,实现如下功能。
1.1 全程双通道冗余测判
GPS定位正常时,所有安控决策均由主通道即定位测判通道作出;一旦GPS异常,系统自动切换至热备份的偏航角积分测判通道;若GPS恢复正常,系统尚可反向切换。
1.2 预防性修偏
GPS定位正常时,若测判飞行器触及容差线,安控计算机将发出“左修偏/右修偏”指令且持续时间与容差值成正比。驾驶仪接此指令后将即刻纠偏,可提前预防越界事件。
1.3 可预定的爬升规避
若射前装订爬升标识符为有效时,安控计算机将依据预定的定距侧避点或理论终点时间向驾驶仪发送爬升规避指令;若装订爬升标识符为无效时则表示不选择爬升规避。
1.4 超程/超时自毁
依据预定的超程距离或飞行超时时间,安控计算机将定距/定时发送超程自毁指令。
2 硬件设计
2.1 安控计算机
安控主机模块采用DSP处理器,外扩512K FLSAH存储程序和数据。该主机带有与GPS、遥测、综控机、安控辅机等通信的四个RS-442端口,带有多个与外部进行信息交换的AD、I/O端口。
2.1.1 主控器
主控器采用TI公司的TMS320C6726B[3]。系统外扩FLASH存储器选用SST39VF040,通过EMIF总线与DSP连接,系统上电后DSP的引导装载软件将SST39VF040中的飞控程序加载到TMS320C6726B的内部RAM中运行。
2.1.2 输入/输出指令接口
输入/输出指令接口由CPLD器件EPM1270实现扩展,通过CPLD编程实现管脚特性定义和地址分配。
输入指令通过光电耦合器MOCD-213隔离后接至CPLD的I/O口,由DSP读取输入指令对应地址的数据,判读输入指令状态。
输出指令由DSP通过数据线向指定地址写数据,由CPLD的管脚输出,经总线收发器SN74LVC4245A完成电平转换后驱动固态继电器输出指令。
2.1.3 通讯接口
安控计算机共两路UART串行接口,接收端隔离。串口芯片选用TI公司的TL16C754BPN,包含4路独立串口。RS-422电平转换选用MAX490ESA,接收端选用Hp公司的双通道高速光电耦合器HCPL063N实现隔离。
2.1.4 AD接口
安控计算机的A/D转换器选用AD7656BST,输入模拟信号的地经过100欧姆电阻实现与A/D芯片模拟地的隔离,然后经滤波电路后输入AD7656BST。
2.2 GPS模块
GPS信息是飞行器安全测判的主要信息源,GPS模块由GPS模块主机、接收天线和高频馈线组成,配置两路RS-422串口,一路至飞行器遥测设备,传输原始信息,其中包括伪距帧、电文帧和定位帧;另一路至安控计算机,传输飞行器遥测站用事后差分信息和飞行器实时定位信息,数据周期性刷新。
3 软件设计
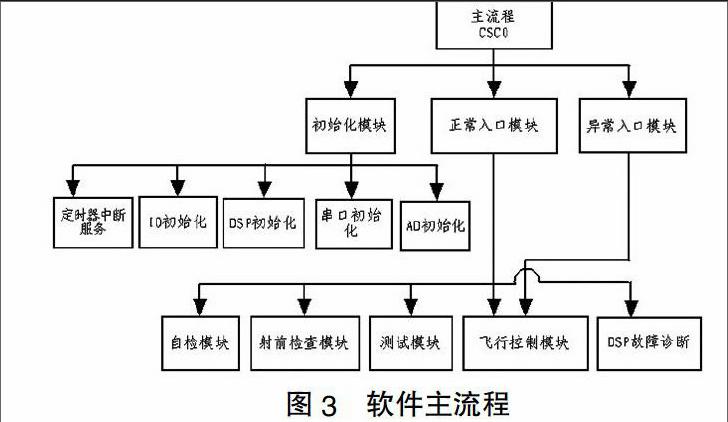
3.1 软件结构
安控软件主流程示意图如图3所示。
3.1.1 自检模块
自检模块完成安控计算机的自检,包括Flash检查、RAM检查、输入/输出指令初始状态检查。
3.1.2 射前检查模块
射前检查首先读串口信息,检测射前检查命令,如果命令到来则依次进行GPS性能检查、遥测接口检查、串口检查。
3.1.3 飞行控制模块
飞行控制模块是安控计算机软件的核心部件,飞行器收到飞行零秒后进入飞控循环并周期性的进行解算,是飞试过程中必须执行的安全控制任务。进入飞控循环后,依次执行时序指令、GPS状态测判、位置测判、偏航测判,发送遥测数据。
1)定时模块
进入飞行零点后,在相应起控时间点发出对应的控制指令。起控时间累加至某一时间,安控解锁并将偏航积分标志置为有效,记录当前的航向陀螺角。
2)GPS测判模块
GPS测判的目的是判断GPS接收机的工作状态是否正常,信息是否可用,以及信息如何处理。GPS测判模块包括:GPS定位状态测判、坐标转换、信息滤波、失捕处理。
进入GPS定位状态测判子模块后,安控计算机查询GPS串口信息并设置GPS判读标识来记录GPS状态。
当GPS定位正常,状态字全零且位置信息有效时,执行位置信息的坐标转换和滤波处理。坐标转换将GPS输出的以地心坐标系为参考的信息转换至发射坐标系。
滤波处理的目的是判断当前点是否为野值点,采用速度滤波的方法,以设定的相对误差限为判决条件。
飞行过程中,GPS允许失捕,设置其最长失捕时间,当GPS失捕时间不大于最长失捕时间时,由外推算法得到当前点的坐标值。
定位测判时,以基准坐标系为参考,将坐标信息从发射坐标系转换至基准坐标系。
3)位置测判模块
安控解锁后,安控计算机以GPS坐标信息为依据,每个解算周期都将对飞行器的位置进行测判,完成对理论终点时间时差修正、一次性修偏控制、超程判断、越界判断。
在飞行器发射前须完成对安控任务参数中理论飞行终点时刻T以及飞行器航向定距侧向规避点X的装订。当飞行器航向距离小于定距侧向规避点,且飞行器累计飞行时间不小于理论飞行终点时刻时,安全控制系统启动对理论终点时刻T的修正。
当飞行器GPS处于定位状态,飞行器在飞行过程中偏离航向的侧向宽度大于修偏起控标准时,安控计算机发出一次性修偏控制指令。
超程判断包括超时判断和超程判断。若飞行器GPS定位正常时,采用GPS位置信息判断飞行器的飞行距离是否超过射前装订的终点距离,当到达终点距离时安控发出超程告警;若GPS定位异常位置信息不可信时,飞行器依据射前装订的终点时间来判定飞行时间是否超时,并确定是否发出超程告警指令。
越界判断用于判断飞行器是否超出安全区域的侧向边界。当侧向宽度大于射前装订的越界预警变量时,安控计算机发出越界告警指令。
4)偏航测判模块
偏航积分测判以安控解锁为启动依据。安控解锁后启动偏航积分测判。偏航测判模块对航向陀螺信息动态偏差角进行积分得到飞行器侧向位移。
当GPS定位正常位置信息可用时,周期性的采用转换得到的基准横向坐标值对偏航积分侧向位移标定一次。GPS状态异常时,依据设定的安控管道计算出偏航预警变量值,并将偏航积分侧向位移与偏航预警变量值进行比较,若偏航积分侧向位移大于偏航预警变量值时,安控发出偏航告警指令。
4 结束语
本文介绍的是一种基于嵌入式的飞行器安全控制系统,确保了飞控解算实时、可靠。系统采用双通道冗余控制,运用GPS信息作为主测判手段,偏航角积分测判为辅测判通道;飞行试验全程可以进行一次纠偏提前预防越界;安控计算机能准确发出越界、超程/超时指令,控制飞行器实施自毁。飞行试验结果表明,本安全控制系统安控策略可靠、有效,其设计思想和系统架构对于飞行器的可靠性以及飞行试验安全性设计具有较高的参考价值。
【参考文献】
[1]常均雨.舰载试验靶弹航区安全飞行控制[Z].舰载导弹武器及其发射安全研讨会.
[2]陈德勇,徐伯夏,杨远波.GPS在战术导弹飞行试验中的应用[Z].2000年全国第九届空间及运动体控制技术学术会议,2000.
[责任编辑:邓丽丽]