一种排爆机器人设计与研究
2015-09-20李云江马孝林刘庆元
李云江,马孝林,刘庆元
(1.山东建筑大学 机电工程学院,山东 济南 250101;2.山东建筑大学 信息与电气工程学院,山东 济南 250101)
一种排爆机器人设计与研究
李云江1,马孝林1,刘庆元2
(1.山东建筑大学 机电工程学院,山东 济南 250101;2.山东建筑大学 信息与电气工程学院,山东 济南 250101)
针对当前排爆作业未知非结构化环境的特点,设计了一种小型排爆机器人,该排爆机器人到达指定位置后,通过同步带来带动爪手上下移动,然后通过固定在爪手上的电磁铁的开合来夹持目标,其控制信号为远程无线控制。采用该机器人可以代替排爆人员搬运物品,提高了工作效率和安全系数。
排爆机器人;结构;程序;设计;无线控制
1 引言
当今世界恐怖袭击事件时有发生,社会影响特别恶劣,研制满足实战化需要的反恐排爆设备显得极为迫切,世界各国尤其是发达国家都特别重视对反恐排爆机器人的研究。自动型排爆机器人能分辨出什么是可疑物品或危险物品,及时排除险情,但成本较高,一般在很危急的时候才使用[1-3]。目前使用的防爆机器人,一般价格昂贵,设计比较复杂,不利于推广应用[4-6]。本文研制了一种远程操控型机器人,体积小,重量轻,在可视条件下进行人为排爆,成本低廉,具有较高的应用价值。该排爆机器人的底盘下有四个轮子负责前进和转向(也可以设计成轨道形式)。通过遥控,该机器人可以进行伸缩、弯曲和转动,最终完成抓取工件,满足排爆工艺要求。
2 机器人的机构设计
2.1 总体设计
该排爆机器人是依靠控制电磁铁的通断电来实现抓取和放下物品。在电磁铁通电后,电磁上连接弧形爪,依靠弧形爪来抓取物品。为了防止执行装置超出行程,在竖直的支撑架上端安装一个行程止动轴。
传动装置的动作方式是依靠步进电机控制的同步带来实现对执行部件的竖直升降的,需要准确的定位支爪,因此采用步进电机控制同步带来达到上下位置的精确定位,且同步带有两块硬铝板材来支撑,这样就既可以保证强度又能减轻重量。
由于本机构不仅需要运动灵活,而且需要搬运物品,因此机器人主体结构大部分选用硬铝板材,总体结构如图1所示。
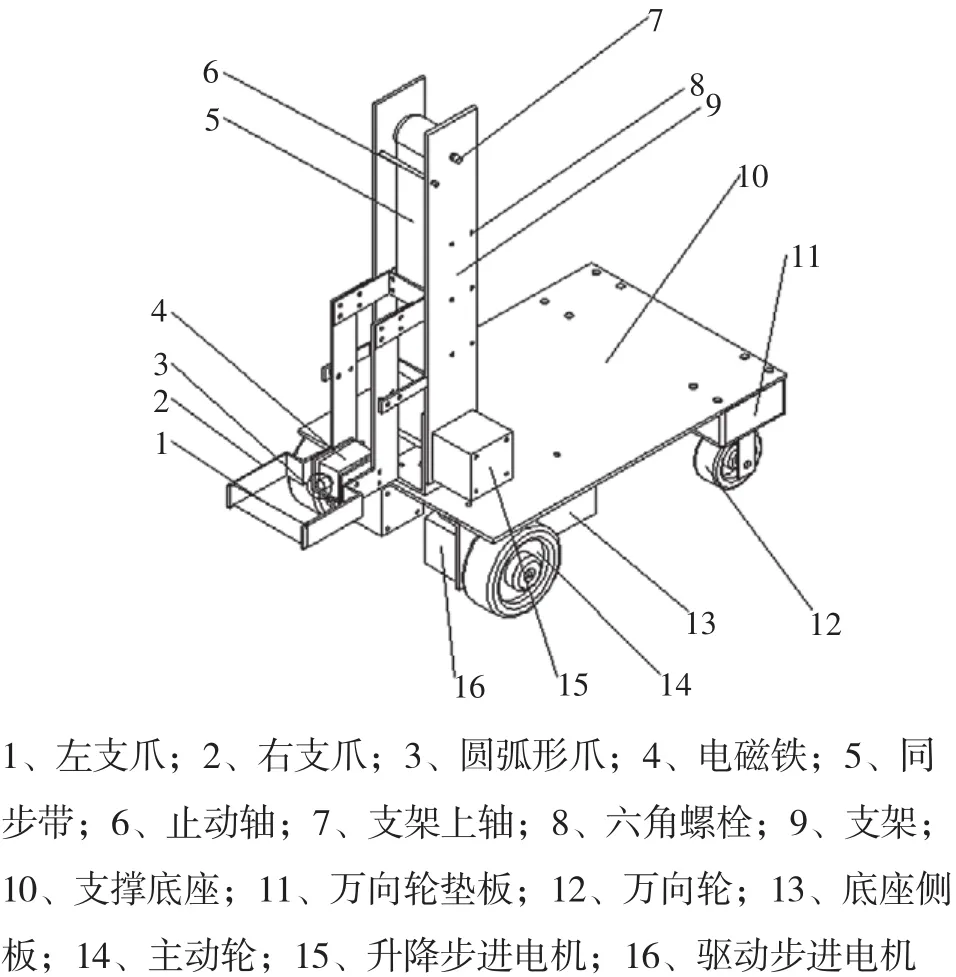
图1 排爆机器人总体结构
2.2 驱动电机的选择
该机器人的运行是依靠驱动轮的运动来实现的,为了保证控制抓取和放下工件的力度和精度,必须要求它有较高运动精确且便于遥控,所以选用两个步进电机作为驱动电机,并且两个前轮为驱动轮。
3 控制系统设计
3.1 硬件系统设计
3.1.1 电源电路的设计
由于机器人行走、抓取等动作需要较大功率,一般电池不能满足其需要[7],所以选用了双输出交流整直流电源输出电压分别为24V、12V,额定电流分别为3A、2A。
考虑到AT89C52芯片要求的供电电压一般在5V,则电源电路需设计成5V的稳压供电电路,本文选用7805固定正输出电压集成稳压器,可以将输出电压稳定在5V。其电源电路设计如图2所示。
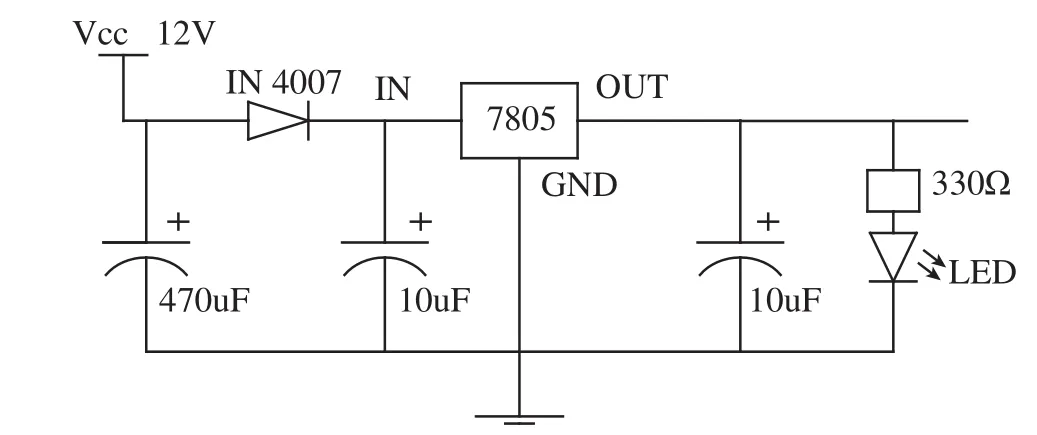
图2 电源电路
3.1.2 步进电机驱动电路的设计
机器人的前进、后退、左转、右转以及爪的升降都由步进电机来控制。步进电机由驱动器驱动,其驱动电压为12V。驱动器本身所需电压5V,驱动器的步进脉冲与方向脉冲由单片机提供。本设计的控制电路如图3所示。
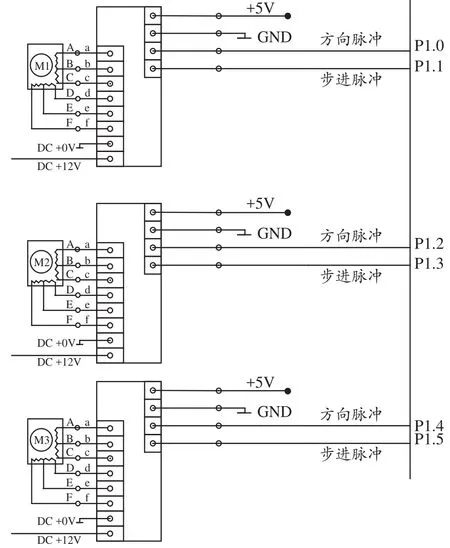
图3 步进电机控制电路
3.1.3 爪部电磁铁电路的设计
电磁铁用来抓取重物,它的开合由继电器控制,继电器型号为4100,工作所需电压为5V,由于继电器为电感性线圈所以并上一只续流二极管。为了不使继电器对单片机造成冲击,在三极管与单片机之间加光隔P521。电磁铁工作电压为24V。本设计的控制电路如图4所示。
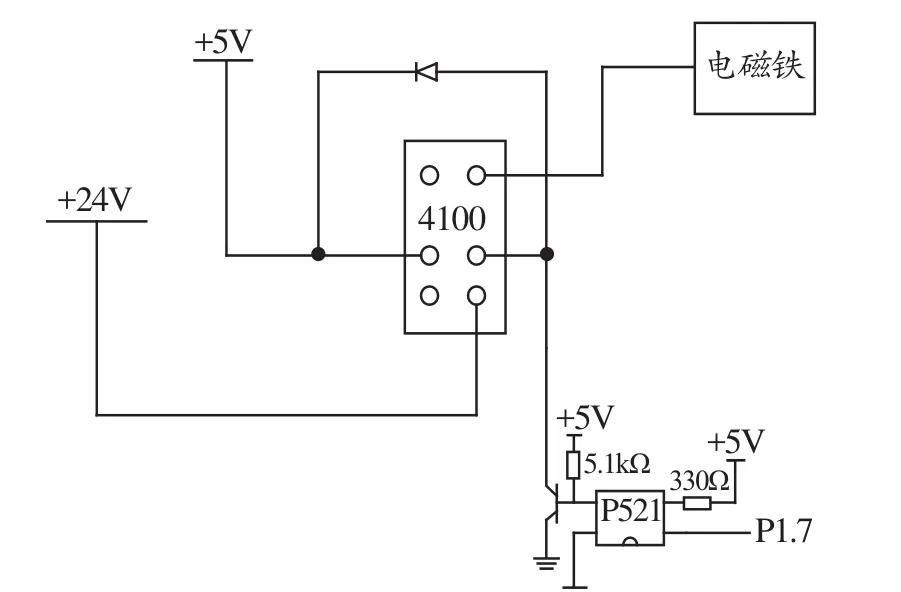
图4 爪部电磁铁电路
3.1.4 遥控接受器与单片机的连接电路设计
遥控接收器本身需要5V电压,它的D0~D7引脚与单片机的P2.0~P2.7引脚对应相连,当摇控器发送端某一按键按下时与之对应的接收器上的引脚就为高电平,单片机上对应引脚也为高电平。其电路图5所示。
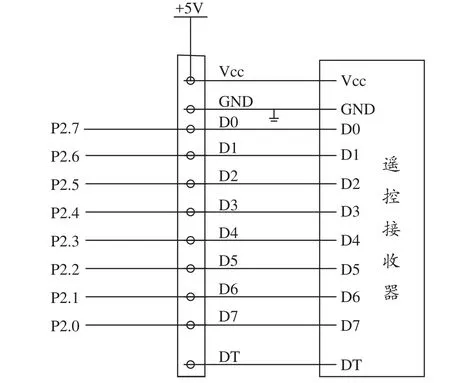
图5 连接电路电路图
3.2 软件系统设计
排爆机器人要实现的动作分别为机身前进、后退、左转、右转,爪的上升、下降、爪开、爪合。这八个动作对应八个子程序。主程序为检测P2口各引脚电平,检测到某一引脚为高电平则跳到对应子程序。流程图如图6所示。
信号采集处理的主要功能是将遥控接受器的高低电平信号变化经I/O口输入单片机,再由单片机做出相应的反应,实现排爆机器人的各个动作。
4 结论
该机器人结构新颖,已获得国家发明专利,而且价格低廉,便于推广应用。使用该排爆机器人,排爆人员可在远距离对机器人进行精确遥控,完成抓取爆炸物并将运至安全地带。该机器人既可以在开阔地带工作,也可以在建筑物内工作,或在狭小的隧道空间工作。
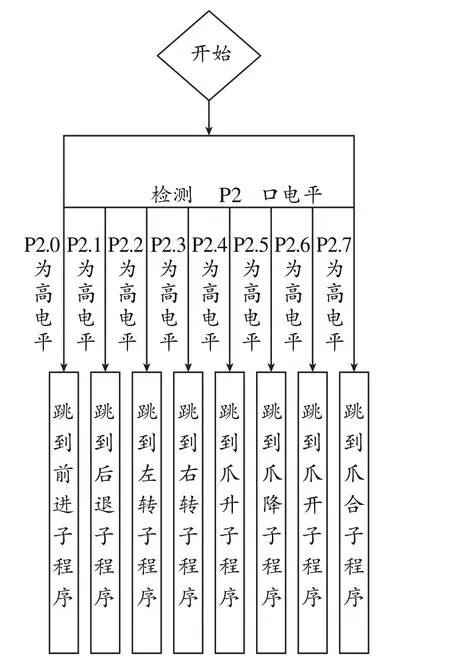
图6 流程图
[1]曲道奎.中国机器人产业发展现状与展望[J].中国科学院院刊,2015, 30(3):342-346.
[2]梁栋, 尹晓红, 王梦晴.移动机器人研究现状及发展趋势[J].科技信息, 2014, 32(9):33.
[3]周琪涵, 郑嫦娥.移动机器人的发展现状及其创新设计初探[J].科技风, 2013, 26(16):58-60.
[4]周丹, 张钧嘉, 贾瑞清.模块化煤矿移动机器人平台的研究[J].煤矿机械, 2013, 36(5):58-60.
[5]类成玺.排爆机器人的结构设计[J].装备制造, 2009, 3(9):179.
[6]李波, 张瑾, 李国栋.排爆机器人机械臂控制系统设计[J].机电工程,2015, 32(8):1110-1114.
[7]覃才福, 蓝会立, 罗植升, 等.小型排爆机器人的直流电机驱动电路设计[J].仪器仪表用户, 2015, 22(4):37-39.
Research and Design of Explosive Disposal Robot
LI Yun-jiang1, MA Xiao-lin1, LIU Qing-yuan2
(1.College of Mechanical and Electronic Engineering, Shandong University of Architecture, Jinan 250101, Shandong, China; 2.School of Information and Electronic Engineering, Shandong University of Architecture, Jinan 250101, Shandong, China)
Aiming at the specialty of unknown unstructured environment in operation, the explosive ordnance disposal robot was designed.Arriving at the designated location, the stepper motor which is fixed to the base makes the control gripper move simultaneously up and down, and then through the fixed starting point on the opening and closing of the electromagnet to clamp their goal, and signals is controlled by remote wireless system.The robot is able to make effective use of remote control operation, replacing the labor, and improving work efficiency and safety factor.
explosive ordnance disposal robot;structure;program;design;radio control
TP242.3
A
1009-3842(2015)06-0055-03
2015-09-09
李云江(1966-),男,山东莱阳人,大学教授,主要从事特种机器人和建筑机械的研究。E-mail: liyunjiang38@126.com
