基于FCS-MPC的电压跟踪调制方法
2015-09-17吴德会
吴德会,李 钷
(厦门大学 机电工程系,福建 厦门 361005)
0 引言
模型预测控制 MPC(Model Predictive Control)是一种基于模型的优化闭环控制算法,也是当前得到广泛关注的一种新型预测控制策略[1]。它用滚动的有限时段优化取代一成不变的全局优化,更能适应实际过程,具有更强的鲁棒性[2]。目前,在电力电子领域MPC大部分应用于针对预测电流的控制,属于线性控制方法的范畴[3]。它通过预测下一个开关周期开始时刻的参考电流,与当前输出电流比较计算出开关管的占空比,使输出电流在下一个周期开始时刻等于给定的参考电流。预测电流控制方式可在数字信号处理器上实现,具有较小的电流畸变和谐波分量以及较高的控制精度[4]。
而在有源电力滤波器、逆变器和电机驱动器系统中,由于往往仅存在有限数量的开关状态,由此MPC的寻优问题可得以简化,即仅需考虑可能开关状态下的系统预测问题[5]。因此,近几年在上述领域,一种新的有限集模型预测控制FCS-MPC(Finite Control Set-Model Predictive Control)策略得到了有效发展[6]。目前,FCS-MPC基本上应用于以电流为控制对象的有源电力滤波器[7]、并网逆变器[8]、变频驱动器[9]、整流器[10]等,而针对电压对象进行预测跟踪控制的应用研究尚较少,这主要是因为被跟踪的电压对象往往为连续变化量,而逆变器输出却只能是脉宽调制PWM(Pulse Width Modulation)的开关量,因此用开关量跟踪连续变化量存在较大的难度。
本文将FCS-MPC引入电压跟踪的PWM领域,直接以连续的期望控制电压为控制目标,以控制误差为评价函数,实现用PWM调制波对连续变化的电压实施跟踪控制,这是FCS-MPC策略在跟踪调制领域的新应用[11]。该技术另一个突出的特点是调制过程中并没有使用常规策略中的基本电压矢量作为控制量,而是直接将开关器件上、下桥臂的开关时间作为新的控制量。而且,在构造预测模型时,使用全局控制误差代替局部误差,使得整个电压跟踪过程的误差始终被约束在有限的范围内。实验结果证明,利用新方法的跟踪调制输出具有更少的低次谐波,并可以实现最大的线性调制度。
1 新电压跟踪预测控制模型建立与实现
1.1 以开关时间作为控制量
经典的空间矢量脉宽调制SVPWM(Space Vector PWM)方法中,构造了8个基本电压矢量U0~U7来合成期望电压矢量Uref[12]。而现有的FCS-MPC策略中,也均是以基本电压矢量U0~U7作为控制量进行实施。基本电压矢量U0~U7的个数有限,符合有限集的特性[13]。

图1 桥臂电压矢量空间及与作用时间的关系Fig.1 Relationship between bridge-arm voltage vector space and acting time
本文并不考虑8个基本电压矢量 U0~U7,而直接以三相桥臂的开关时间T作为控制量,这是一种新的控制角度。不妨定义a、b、c 三相桥臂各自独立输出的电压矢量分别为Ua、Ub和 Uc。显然,桥臂电压矢量 Ua、Ub和 Uc为恒定量,其值不可变,且互成2π/3 夹角;Ua、Ub和 Uc的空间关系如图1所示[14]。 在实际应用中,可通过改变桥臂电压矢量Ua、Ub和Uc的作用时间Ta、Tb和Tc来达到输出控制电压U的目的[15]。
作用时间Ta、Tb和Tc有比较明确的物理含义,就是对应三相桥臂中上桥臂功率器件的开关时间。因此,根据伏秒平衡关系,U可由下式原理进行控制输出:

其中,Ubase=[UaUbUc]T为定量;T=[TaTbTc]为开关时间。
由此看来,不使用基本电压矢量Ui,而改以开关时间T为控制量实现电压U的控制输出是完全可行的。T的取值范围为连续空间,因此,可通过改变T来实施连续控制,即变采样时间的MPC,对此控制问题将另文讨论。
若从FCS-MPC策略的角度,式(1)的模型存在2个问题:首先,输出控制电压U是2维的,而存在Ta、Tb和 Tc3个待定量,因此式(1)对控制量 T的解不唯一;其次,控制量T的解并非有限集。为此,对三相桥臂的开关时间T增加约束条件,使其取值结果唯一,并且使其取值范围满足有限控制集条件。其具体约束如下:

其中,Ts为最小时间分辨率。
根据式(2)所示约束条件,控制量 T=[TaTbTc]有效结果仅有 7 个,即[0,0,0]、[0,0,Ts]、[0,Ts,0]、[0,Ts,Ts]、[Ts,0,0]、[Ts,0,Ts]和[Ts,Ts,0]。 将上述结果分别记为 Ti(i=0,1,…,6),该控制量 T 明显属于“有限集”。
在实际控制系统中,输出控制电压U是离散的,即可记为 U(n),其中n为时刻。 则式(1)中的模型可表述为如下离散的受约束模型(电压跟踪模型):

其中,T(n)表示控制量T在n时刻的取值。
1.2 新控制量下的FCS-MPC思路
前文已建立式(3)所示的以逆变器功率器件开关时间T作为控制量的全新模型。结合目前普遍FCS-MPC策略原理[16],针对新的控制量T,可产生如下控制系统思路。
实际新模型下的FCS-MPC可理解为如何选择一个适当的时域控制量T(n),使得系统实际输出控制电压(采集值)U(n)尽可能地逼近期望控制电压Uref(n)。 由于时域控制量 T 的集合(控制集){Ti}6i=0是有限的,因此新系统可以根据预测函数f得到第n+1 时刻 7 个可能的预测值1,…,6)。
此时需要再构造一个价值函数gi=g{Uref(n+1),。 显然,不同的预测值对应不同的价值gi,而最小价值对应的控制量Ti将被选作第n+1时刻的最优解。本文中仍使用典型的价值函数[13],即期望控制电压Uref与预测值的二次范式距离,则有如下优化目标:

图2中给出了上述FCS-MPC过程思路在一个α-β二维系统中实现的示例[13]。

图2 二维FCS-MPC过程示意Fig.2 Schematic diagram of 2-dimentional FCS-MPC
1.3 2种电压跟踪预测模型及对应价值函数
式(3)已给出了通过控制量T(n)计算输出控制电压U(n)的电压跟踪模型,因此可直接通过该模型对未来第n+1时刻的进行预测,则可建立电压跟踪预测模型为:

其中,i=0,1,…,6。
同理,可由式(4)所示的优化目标建立对应的价值函数:

其中,i=0,1,…,6;ΔE(n)为新引入的直接跟踪误差。
式(6)的物理含义很清楚:即在有限集条件下,通过直接合成关系来预测第n+1时刻电压i(n+1),并使预测值i(n+1)尽可能地逼近期望控制电压Uref(n+1),即使得对应的直接跟踪误差 ΔEi(n+1)幅值最小。本文将式(5)建立的预测模型及对应的价值函数称为直接跟踪预测控制。
直接跟踪预测控制的优点是预测模型比较直观,物理含义清晰。但在有限控制集{Ti}6i=0条件下,直接跟踪误差ΔE(n)客观存在且随机分布。因此,即使任意时刻的实际输出电压U(n)都尽可能地逼近期望控制电压 Uref(n),但 ΔE(n)的分布仍无法得到有效约束,势必形成ΔE(n)的积累,最终使系统背离控制目标。
显然,新的有限集控制量T提出后,式(1)所示的控制输出关系不再精确成立。因此,针对新的控制量T,并不能实施简单的直接跟踪预测控制。如何构造新的、有效的跟踪预测模型及对应的价值函数,才是实现本文新思路的关键。
为解决上述问题,本文定义一个新的评价角度,即全局控制误差。对式(3)等号两边从第1~n时刻进行累加,则有如下关系:

同理可得:

则式(7)等号两侧与式(8)相减并整理,可得:


其中,Uout=TUbase/Ts为逆变器实际输出电压矢量;函数O{·}表示输出电压矢量的物理采样值。

再将式(11)代入式(10)并整理,可得如下迭代关系:


为区分直接跟踪预测模型,本文将式(12)建立的预测模型及对应的价值函数称为全局跟踪预测控制。
1.4 全局跟踪预测控制下调制过程的具体实现
根据上述分析和建模,针对新控制量T的全局跟踪预测控制,可通过图3所示方案具体实现。

图3 新模型的具体实现方案Fig.3 Implementation scheme of new model
从图3中也可以看出,该方案的技术本质是对期望控制电压Uref实施以控制量T为对象的FCSMPC。若Uref满足连续的基准矢量电压圆分布,即图3中所示的期望控制电压生成器满足:

其中,Ur为输出相电压的有效值;ω为角频率。新模型跟踪输出的结果实际为一种新的PWM调制波。因此,本文方案亦可理解为一种PWM调制新方法,该方法中采用的控制流程图如图4所示(图中虚线表示数据流)。

图4 基于FCS-MPC策略的跟踪调制流程Fig.4 Flowchart of tracking modulation based on FCS-MPC
2 新方法的性能分析
2.1 全局控制(调制)误差及其范围
由式(13)可知,本文中所设定的FCS-MPC价值函数gi实际为全局控制误差E(n)的二次范数,即有:

则由式(9)可给出控制误差E(n)的显式表达:

3个桥臂电压矢量Ua、Ub和Uc“撑”起的空间关系如图5所示。

图5 控制误差与桥臂电压矢量的空间关系示意Fig.5 Schematic diagram of spacial relationship between control error and bridge-arm voltage vector
在图5中,6个时域控制量 Ti(i=1,2,…,6)对应的输出控制矢量为正六边形的顶点,T0Ubase为中心,则不妨记该正六边形的外接圆半径为R。由式(14)可知,对于六边形范围内的任意参考电压矢量ref,离其二次范式距离最近的六边形顶点或中心将被选择作为FCS-MPC的控制量。因此,时域控制量Ti的作用范围为图5所示的六边形“蜂巢”状分布,不妨记该六边形“蜂巢”的外接圆半径为r。如图5中所示,ref处于控制量T2的六边形“蜂巢”中,即控制量T2具有最小的代价函数,对应的控制误差为 E(n)。
通过Clark变换,可得外接圆半径R的表达式:
其中,Ud为逆变器直流侧母线电压。

对于确定的逆变系统而言,Emax为恒量。因此新方法的全局控制误差E存在恒定的上、下限阈值±Emax,即其跟踪控制(调制)过程的误差能始终被约束在有限范围内而不发散。
2.2 调制波的电压利用率
为便于分析,假设当前时刻连续的期望控制电压即跟踪目标 Uref(n)的相角在[0,π/3)范围内,如图6所示,对于其他范围相角的分析类似。

图6 针对控制量T的控制误差示意Fig.6 Schematic diagram of control error for control variable T
对Uref(n)进行空间分解,记其在Ua和Ub方向上的投影坐标分别为ta和tb,则有:

由于 Uref(n)相角在[0,π /3)范围内,即有 ta>tb,因此在FCS-MPC策略中主要实施时域控制量T0、T1和T2。若选用控制量T1来实施控制,则直接跟踪误差为:
而选用控制量T2实施控制,则直接跟踪误差为:

显然,若在T1、T22个控制方向的误差之和为负,则可进一步实施控制量T0来消除;反之,势必会造成误差的累加,不再满足式(18)所示的误差上限Emax。因此线性跟踪过程需满足如下关系:

再将上式代入式(19),可得期望控制电压Uref的幅度约束:
式(23)右侧存在极大值,即有:

由上式可以看出,利用FCS-MPC策略实现PWM的最大电压幅值为,即如图6中所示的内切圆范围。根据电压幅度调制度m的定义[17],有下式成立:

因此,新方法进行电压跟踪的线性幅度调制度可达到1,与SVPWM方法理论电压利用率相同,比SPWM提高15.47%。
3 仿真与实验
3.1 仿真
为验证所提新方法的可行性,在Simulink环境下编写新电压跟踪方法的实现模块,并与现有的SVPWM方法进行对比[18]。仿真时,设置二电平电压源逆变器(2L-VSI)母线电压Ud为540 V。
在本实验中,SVPWM方法采用七段式编码,即每个调制周期TSVPWM内固定开关7次,因此实验中SVPWM方法的调制载波频率设置较低,为1 kHz。采用SVPWM方法调制的输出为标准三相工频电压(380 V /50 Hz),其线电压 Uab波形如图7(a)所示。
而基于全局跟踪预测模型的FCS-MPC,存在最小时间分辨率Ts,因此其载波频率可以设置得较高,在本实验中设为10 kHz,即Ts=100 μs。新方法跟踪的电压对象为三相380 V/50 Hz正弦电压,其跟踪结果中线电压Uab波形如图7(b)所示。
从图7中可以看出,2种方法输出的线电压波形整体轮廓相似,客观验证了新方法通过实施对连续电压目标跟踪的FCS-MPC策略来实现调制的可行性。但从微观细节上看,2种方法也存在一定的差别。SVPWM方法调制的脉宽并没有约束,可以连续变化,但在时间轴上开关比较频繁。而新方法跟踪输出的脉宽为最小时间分辨率Ts的整数倍,因此可形成长脉宽,特别是在峰值调制时几乎不进行开关切换。
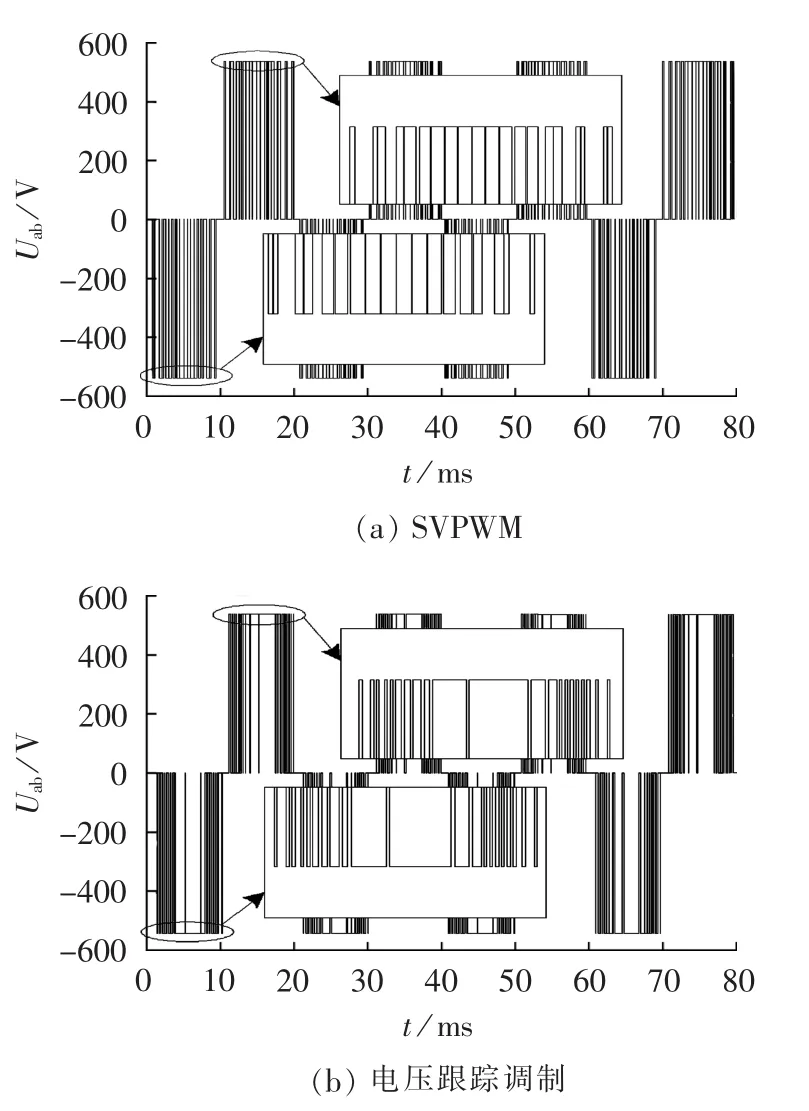
图7 2种方法输出的线电压波形Fig.7 Waveform of line voltage output for two methods
从直观上看,新方法是通过全局预测模型实施电压跟踪,其价值函数亦是建立在全局电压跟踪误差最小化基础上。因此,该方法并非在一个固定的调制周期(局部)内调整占空比,而是从整个输出电压时间轴(全局)的宏观范围来实施占空比调整,且调整结果为Ts的整数倍。
再分别对图7中所示2种PWM波形进行频谱分析,分析其在 0~1 kHz低频段的谐波特性。SVPWM方法调制波10次谐波(500 Hz以内)的总谐波畸变率THD(Total Harmonic Distortion)为9.13%,而新方法跟踪结果的THD仅为1.35%。客观而言,新方法10次谐波以内的杂波成分非常小,该特性相对于现有调制方法,更有利于进行后续的低通滤波处理。
3.2 实验
笔者基于2812 DSP开发平台搭建了一台4.0 kW电压跟踪逆变系统样机开展物理试验,以验证新方法利用连续电压跟踪实现调制的有效性。基于FCS-MPC策略的跟踪模块编程后嵌入DSP芯片内部存储器,驱动模块采用2电平三相逆变桥式拓扑,三相桥选用独立功率控制器件IKW40T120自行搭建,并通过高速光耦隔离后驱动三相IGBT管的控制芯片。
物理试验时选用三相异步电机作为实际负载,并用4路数字示波器TPS2014对逆变系统工作状态及其输出电压进行观测。具体实验参数如下:逆变系统中,直流母线电压542 V,输出频率50 Hz,载波频率 9 kHz,调制度0.93,采样周期 0.02 ms,采样长度50 ms;控制电机中,额定功率4.0 kW,额定电压400 V,额定转速 1440 r/min,极对数 2,定子电阻0.52 Ω,定子电感135 mH。
逆变系统样机的输出为三相电压,因此若不特别说明,本文使用示波器主要观测a、b相之间的线电压。将示波器第1路接系统的期望控制电压Uref,第2路接系统实际输出电压Uout,2路波形采样的瞬时值如图8(a)中 uref、uout所示。

图8 物理试验中实际输出电压/电流波形(调制度 m=0.93)Fig.8 Experimental waveform of voltage and current(modulation index m=0.93)
从图中可看出,系统的期望控制电压即被跟踪对象Uref为连续正弦信号,而跟踪结果Uout却是以Ts为最小分辨率的PWM波。虽然实验系统中实测的跟踪对象Uref和跟踪结果Uout两波形存在较大差异,但两者的总体轮廓相似。
当然,逆变系统的实际输出Uout为PWM波,在对连续电压进行跟踪过程中,不可避免存在较大的跟踪误差E。为分析跟踪误差的特性,再将跟踪对象Uref和跟踪结果Uout同时接入差分电路,并用示波器第3路观测跟踪误差E的时间分布(差分电路输出),其波形采样的瞬时值如图8(a)中e所示。
从实际测试结果来看,跟踪误差E的幅值波动较大,但其正误差和负误差呈周期性对称分布。不妨将跟踪误差E接入由电阻、电容构成的一阶滤波电路中,去除其高频噪声,取其稳定的平均信号,记作。再将接入示波器第4路端口进行在线观测,其波形采样的瞬时值如图8(a)中e所示。从该曲线可看出,新方法的跟踪结果Uout与跟踪对象Uref之间的误差E是收敛的,其平均值的波动很小,幅值基本为0。因此,该测试结果有效说明了跟踪结果Uout与Uref的伏秒特性或低频成分相当。
最后,将三相异步电机负载接入实验室所构建的电压跟踪逆变系统样机中,电机运转正常。用示波器同时观测 a、b、c 三相定子电流 ia、ib和 ic, 其结果如图8(b)所示。从图中可以看出,实测的定子电流波形均呈现了较好的正弦特性,其开关谐波噪声含量也较低;用示波器实际分析ia、ib和ic的THD仅为1.03%。
本文所提方法有效地实现利用PWM开关量对连续变化电压的FCS-MPC跟踪,电压跟踪效果良好。新方法虽然是基于2电平电压源逆变器拓扑结构进行理论推导和物理试验,但该原理亦可应用于其他多电平调制的情况。
4 结论
a.直接利用功率器件的开关时间T代替常规的基本电压矢量作为新的控制量是可行的,可通过对新控制量T施加约束,达到有限控制集的目标。
b.利用全局控制误差代替局部误差,构造了一种特殊的全局跟踪预测模型及其价值函数。在此基础上,利用FCS-MPC策略实现了PWM波对连续变化电压的跟踪控制,并使电压跟踪过程的误差始终被约束在有限的范围内。
c.若控制对象Uref满足基准矢量电压圆分布,则新方法等效于对输出电压进行PWM波调制。该方法的线性电压幅度调制度可达到1,而调制波低频段所含杂波成分较低,有利于进行后续的低通滤波处理。
