基于自适应混合肝脏模型的建立
2015-09-16陈卫东赵国志朱奇光
陈卫东 赵国志 朱奇光*
1(燕山大学信息科学与工程学院,河北 秦皇岛 066004)2(河北省特种光纤与光纤传感重点实验室,河北 秦皇岛 066004)
基于自适应混合肝脏模型的建立
陈卫东1,2赵国志1,2朱奇光1,2*
1(燕山大学信息科学与工程学院,河北 秦皇岛 066004)2(河北省特种光纤与光纤传感重点实验室,河北 秦皇岛 066004)
基于黏弹性力学模型,建立一种自适应无网格迦辽金与广义表面网格混合模型。手术区采用自适应无网格迦辽金法,非手术区采用广义表面网格法,在手术区域和非手术区域之间建立过渡区域,过渡结点满足力和位移的平衡,以实现两个区域的无缝耦合。基于此模型,对人体肝脏进行形变仿真实验。实验表明,该模型在与无网格迦辽金模型形变状况相同的前提下,单步执行时间由17.4 ms降低到12.9 ms,帧频由57.47帧/s提高到77.52帧/s。该模型继承了无网格迦辽金模型的优点,同时提高了模型的实时性。
虚拟手术; 无网格迦辽金; 广义表面网格; 形变仿真
引言
在基于虚拟现实的仿真系统中,人体软组织形变模型的建立是虚拟手术仿真系统的关键技术。在虚拟环境力触觉交互过程中,建立基于物理意义的力触觉模型是非常重要的[1]。目前,国内外学者所研究的软组织模型大多是基于弹性理论的物理形变模型。Tagawa等提出了基于同步旋转有限元的自适应矩形四面体软组织形变模型,该模型精确高,与传统的有限元模型相比,实时性得到了提高,但要求网格的节点数仍很多、计算成本较高[2]。Peterlik等提出非线性有限元模型,虽然提高了实时性,仍无法满足力触觉反馈上千赫兹的频率要求[3]。Wang等通过对模型的边界进行离散简化计算,但在稳定性方面存在一定的困难[4]。Zhong等提出具有物理化学特性的反应扩散表面模型,缺点是难于进行复杂的手术操作[5]。陈卫东等基于弹簧质点的结构模型,建立一种改进的软组织实时形变模型,在正六边形拓扑结构软组织表面模型中,增加了虚拟体弹簧,以实现更加真实的形变效果,模型原理简单,但是稳定性差[6]。吴等提出了一种基于以受力点为中心、沿径向方向分割为呈同心圆分布的弹簧-质点系统,该方法的分割只涉及发生变形的局部区域,不需要对整个物体进行大量的矩阵运算,但是该模型各点计算不一致,不易扩展[7]。针对网格模型的缺点,徐少平等提出基于无网格的软组织切割模型,打破了网格限制,在触觉视觉逼真度和实时性方面都具有很大优势,但稳定性较差[8]。Lennard-Jones势能法,可以看作是弹簧质点模型的一般化,其实时性较好,但是它的触觉和视觉逼真度比较差[9]。离散机械力学法,缺乏描述塑性、黏弹性等的能力、触觉和视觉效果一般[10]。光滑粒子流法,易于编程实现,但是计算量大,难于满足实时性[11]。PCMFS方法,是一种利用连续介质理论描述软组织形变的方法,可以看成是基于质点的离散系统和连续介质的混合模型,该模型视觉和触觉逼真度比较好,但是当节点数大于500时难于满足实时性[12]。Muller法,实时性较好,由于应变能函数中只考虑了线弹性材料特性,所以对软组织性质描述能力不足[13]。刘雪梅等基于黏弹性力学模型,提出了无网格迦辽金与弹簧质点耦合的软组织模型,为软组织形变仿真提供了一种新的研究思路,高精度及与拓扑无关的无网格迦辽金法与高效简单的弹簧质点组合来实现软组织形变仿真,可以有效地解决精度与效率的平衡问题,但是该模型的真实性和实时性还可以进一步提高[14]。
笔者针对目前软组织模型存在的问题,基于黏弹性力学模型,提出了自适应耦合无网格迦辽金与广义表面网格混合模型、在非手术区广义表面网格模型,有效地提高模型的实时性,在手术区采用自适应无网格迦辽金法,使其不仅适合缝合、切割等复杂操作,而且进一步有效地提高模型的实时性,采用自适应边界,以实现两个区域的无缝耦合。
1 模型构建方法
软组织器官具有松弛特性、不可压缩特性、蠕变特性、各向异性等特性。由于其复杂性,软组织模型完全真实地表现软组织特性非常困难,难以满足虚拟手术的实时性。下面所提出的自适应耦合无网格迦辽金与广义表面网格混合模型不仅适合缝合、切割等复杂操作情况,而且提高了软组织模型的实时性。
1.1手术区域的自适应算法
自适应无网格迦辽金法的自适应分析包括自适应加密和误差估计。自适应加密需要确定稀疏和加密的区域,由于基于应变梯度的方法不需要求解二阶导数,因此本模型采用此方法。
求出节点的应变、应力和节点位移,应变能为

(1)
式中,DSE是应变能函数,σ为应力,ε为位移。
对于三维情况,分别对x、y、z做偏导,应变梯度(GSED)为

(2)
(3)
(4)
DM为网格密度,有

(5)
式中,N为区域内节点数,V为区域体积。
应变能变化体现为其梯度变化,在算法中采用背景网格进行误差分析;对于第k个背景网格单元,首先要找到第k个背景网格内的所有节点Nk,确定网格密度(DM)。
网格强度rd是自适应方法的关键,将其定义为梯度对网格密度的比值,即

(6)
第k个单元的平均网格强度为

(7)
遍历所有背景网格单元,获得网格强度的最大值、最小值,有
Rmax=max(rd)Rmin=min(rd)
(8)

(9)
1.2非手术区域模型算法
利用非手术区域远离接触区域,没有切割、缝合等复杂操作,根据添加刚体核弹簧质点模型的思想来定义一种广义的表面网格结构,只在非手术区表层的1/5厚度具有质点分布,每一个质点对应一个初始位置质点,所有初始位置质点不会随着受力的改变而改变,在实际质点与初始位置质点之间引入一个初始长度为零的广义弹簧,在非手术区域,实际质点不但受到结构弹簧的作用,还受到广义弹簧的作用,广义弹簧对质点i的力为
fii=ksXii
(10)
式中,Xii是质点i初始位置与当前位置的差值。
质点i和质点j之间的弹簧施加给质点i的内力为

(11)
式中,kd为弹簧的阻尼系数,Xij是两个质点的位置向量之差,ks是弹簧的劲度系数,lij是弹簧的原始长度,vj和vi是节点j和i的速度。
模型中质点的运动都遵循牛顿第二定律,第i个质点所受的合力fi等于所有弹簧提供的内力和它所受外力之和。对于质点i,有

(12)
式中,mi为质点i的质量,fi为质点i所受的合力。
将每个质点组合起来,可以得到模型的整体运动方程
X=M-1f(X,v)
(13)
式中,X、v和f分别是模型质点的位置向量、速度向量和力向量,M为质量矩阵。
1.3过渡区域的划分
将手术区域和非手术区域作为两个实体,通过过渡区域来实现手术区域和非手术区域的耦合,如图1所示。根据手术区域所承受的载荷划分手术区域和非手术区域的边界,过渡结点需满足位移及力的平衡条件。首先在原来网格的基础上细分背景网格,细分后每个小的背景网格满足的条件为至多有一个质点存在,不包含质点的背景网格称为空网格,以空网格为对象,经过顺序迭代搜索,将符合无网格条件的转化到手术区域,将符合广义表面网格模型条件的转换到非手术区域,然后将剩余的作为过渡单元。

图1 过渡单元Fig.1 The schematic diagram of transition elements
非手术区域内部转换条件:如果6个方向都存在单元,有4个及以上的单元为弹簧质点单元时,将此单元转换为弹簧质点单元;如果6个方向都存在单元且都为空单元,将此单元转换为弹簧质点单元;如果6个方向不完全存在,有3个及以上的单元为弹簧质点单元时,将此单元转换为弹簧质点单元。
手术区域与非手术区域单元转换条件相同。
剩余空单元的特征为各个方向同时包含弹簧质点单元和无网格单元。确定过渡单元后,过渡质点需满足所受合力为0,位移相等。遍历过渡区域的所有质点,得到手术区域和非手术区域模型的近似位移函数,计算出二者之间的函数关系作为过渡区域质点的位移函数,实现两个区域的光滑过渡。
2 模型实验
本研究的仿真以肝脏模型为例,其泊松比设为0.35,杨氏模量设为5 000 Pa,平均密度为1.055 g/cm3。成年女性肝脏为800~1 200 g,成年男性肝脏为1 200~1 500 g。仿真基于Intel 酷睿i3 4130处理器,主频为3.40 GHz,内存为4.0 GB,显卡为NVIDIA GeForce GTX 650,系统为WindowS 7系统,开发环境为Visual C++6.0,载荷为5.7 N。
用自适应方法、无网格方法和耦合方法[14]分别构建肝脏模型,在相同的质点施加相同的拉力或压力,分别计算其位移,将3个模型的位移曲线进行对比。
在实验中,模型的质点数同为295时,施力步长为0.3 N,分别对自适应模型、无网格模型和耦合模型[14]进行平行对比实验。
3 结果
在虚拟手术仿真系统中,视觉逼真度是软组织仿真系统的一个重要指标,是软组织仿真系统沉浸感的基础。视觉逼真度与模型的描述能力有关,描述能力越强,模型的逼真度越高。模型的视觉逼真度用形变渲染图来体现。图2(a)为肝脏受拉力时的局部剖面图,虚线内部为手术区域,虚线外部为非手术区域,虚线区域为过渡区域。图3为肝脏受拉力时的形变渲染截图,施力器械为镊子,施力点为圆点处,细线处为过渡区域。图2(b)为肝脏受压力时的局部剖面图,虚线内部为手术区域,虚线外部为非手术区域,虚线区域为过渡区域。图4为肝脏受压力时的形变渲染图,施力器械为镊子,施力点为圆点处,细线处为过渡区域。由图2~4可以看出,过渡区域没有出现尖角和断裂的痕迹,在形变时是连续光滑的,直观证明了笔者所提出的自适应模型是有效的。

图2 力作用下的肝脏局部剖面图。(a) 拉力;(b)压力Fig.2 The local liver profile under the action of force (a) Pull;(b) Press
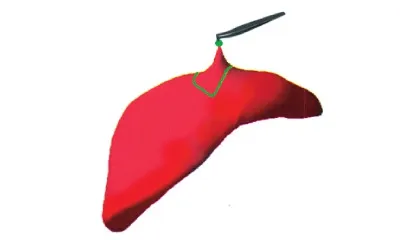
图3 拉力作用下的肝脏渲染图Fig.3 The liver rendering under the action of pull force

图4 压力作用下的肝脏渲染图Fig.4 The liver rendering under the action of pressure forc
虚拟手术系统为受训医生在视觉和触觉上提供各种手术场景的真实再现,体验和学习各种手术情况,降低手术中的风险,降低医生培训成本,对提高医疗水平有非常重要的意义。虚拟手术系统的核心模块是软组织模型,实时性和真实性是软组模型的关键指标。
图5为压力作用下的曲线,图6为拉力作用下的曲线。由图5 和图6可以看出,在相同压力或拉力作用下,自适应模型的位移与无网格模型的误差为±0.01 cm,而耦合模型与无网格模型的误差为±0.018 cm。从数值上表明,自适应模型的真实性比耦合模型的真实性要高。
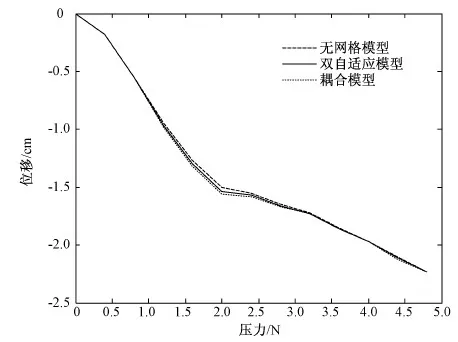
图5 压力作用下的位移曲线Fig.5 The displacement curve under the action of pressure force
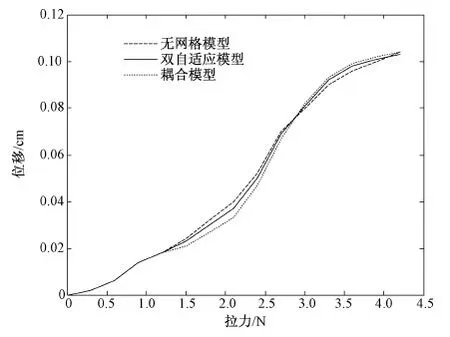
图6 拉力作用下的位移曲线Fig.6 The displacement curve under the action of pull force
软组织模型的实时交互能力对虚拟手术仿真系统具有至关重要的意义。实时交互能力直接决定了模型的仿真效果,是软组织模型最为关键的性能指标。模型的实时性与模型的单步执行时间以及帧频有关。
表1为自适应模型与迦辽金无网格模型的效率对比。由表1可以看出,笔者所提出的自适应耦合无网格迦辽金与广义表面网格混合模型的单步执行时间比无网格模型少了4.5 ms,帧频提高了20.048帧,这意味着模型的实时性得到了进一步的提高。
表1自适应模型与迦辽金无网格模型的效率对比
Table1Theefficiencycontrastofthedoubleadaptivecouplingmodelandtheelement-freeGalerkin

指标无网格模型耦合模型自适应模型单步执行时间/ms17.414.812.9形变频率/(帧/s)57.4767.5777.52
4 讨论和结论
本研究所提出的自适应耦合无网格迦辽金与广义表面网格混合模型在真实性和实时性上对软组织模型有一定提高,但是相对于软组织的生物力学特性还有差距,如在各向异性、非线性等方面,因此还需进一步探求能够对软组织模型定量准确描述的模型。手术的要求非常严格,因此对于试验算法,还需要更为完善的验证方案,如将力反馈、时间、范围等也引入到验证方案中,以达到准确验证的目地。
本研究针对目前软组织模型存在的问题,基于自适应耦合无网格迦辽金与广义表面网格方法,建立了肝脏模型,在直观视觉和数值两方面验证了混合模型的有效性,在保证精度的前提下进一步提高了效率。在手术区域采用自适应无网格迦辽金法,既保证了手术区域的精度,又提高了计算效率,能够满足拓扑结构改变的情况,比有限元更加适合大缝合、切割等复杂形变情况;非手术区域一般不会出现切割、缝合等复杂操作,因此在非手术区域采用广义的表面网格模型,可进一步提高模型的计算效率。实验结果表明,基于自适应耦合无网格迦辽金与广义无网格建立的肝脏模型,能够满足虚拟手术实时性、稳定性、真实性的要求。
[1] 冯元桢,著. 戴克刚, 鞠烽炽, 译. 生物力学: 活组织的力学特征[M]. 长沙: 湖南科学技术出版社, 1986: 222-296.
[2] Tagawa K, Yamada T, Tanakal HT. A rectangular tetrahedral adaptive mesh based corotated finite element model for interactive soft tissue simulation[C] //The 35th Annual International Conference of the IEEE EMBS. Osaka: IEEE, 2013:7164-7167.
[3] Igor P, Mert S, Cagatay B,etal. Real-time visio-haptic interaction with static soft tissue models having geometric and material nonlinearity[J]. Computers & Graphics, 2010,34: 43-54.
[4] Wang P, Becker AA, Jones IA,etal. Virtual reality simulation of surgery with haptic feedback based on the boundary element method, Computers and Structures[J]. 2007,85: 331-339.
[5] Zhong Yongmin, Bijan S, Julian S,etal. Soft tissue deformation with reaction-diffusion process for surgery simulation[J]. Journal of Visual Languages & Computing, 2012,23: 1-12.
[6] 陈卫东, 赵成龙, 朱奇光, 等. 虚拟手术中软组织形变建模及力反馈算法研究[J]. 中国生物医学工程学报, 2013,32(1): 114-123.
[7] 吴涓, 宋爱国, 李建清. 用于虚拟力觉再现的弹簧-质点力/变形模型研究[J].系统仿真学报, 2006,18(11): 3152-3156.
[8] 徐少平, 李春泉, 江顺亮, 等. 基于无网格的软组织切割模型的研究进展[J]. 中国生物医学工程学报, 2012,31(1): 123-128.
[9] Nealen A, Mtiller M, Keiser R,etal. Physically based deformable models in computer graphics[J]. Comput. Graph. Forum 2006,25(4): 809-836.
[10] Jansson J, Vergeest JSM. A discrete mechanics model for deformable bodies[J]. Computer-Aided Design, 2002,34(12): 913-928.
[11] Hieber SE, Koumoutsakos P. A lagrangian particle method for the simulation of linear and nonlinear elastic models of soft tissue [J]. Journal of Computational Physics, 2008,227(21): 9195-9215.
[12] Lim Y, Suvranu D. Real time simulation of nonlinear tissue response in virtual surgery using the point collocation-based method of finite spheres[J]. Comput Methods Appl Mech. Engrg, 2007,196(31): 3011-3024.
[13] Mtiller M, Heidelberger B, Teschner M,etal. Meshless deformations based on shape matching[J]. ACM Trans Graph, 2005,24(3): 471-478.
[14] 刘雪梅, 毛磊, 李运华, 等. 耦合无网格迦辽金与质点弹簧实现软组织形 变仿真[J]. 计算机辅助设计与图形学学报, 2013,25(1): 1-6.
The Construction of a Liver Model Baseed on Adaptive Hybriding Method
Chen Weidong1,2Zhao Guozhi1,2,Zhu Qiguang1,2*
1(Insitute of Information Science and Engineering, Yanshan University, Qinhuangdao 066004, Hebei, China)2(The Key Laboratory for Special Fiber and Fiber Sensor of Hebei Province, Qinhuangdao 066004, Hebei, China)
virtual surgery; element-free Galerkin; generalized surface mesh; deformation simulation
10.3969/j.issn.0258-8021. 2015. 03.014
2014-10-17, 录用日期:2014-12-28
国家自然科学基金(61201112,61172044);河北省自然科学基金(F2013203250, F2012203169)
R318
D
0258-8021(2015) 03-0360-05
*通信作者(Corresponding author), E-mail:zhu7880@ysu.edu.cn
