基于改进遗传算法的机器人路径规划与仿真
2015-09-09李刚鱼佳欣郭道通邹杨
李刚+鱼佳欣+郭道通+邹杨

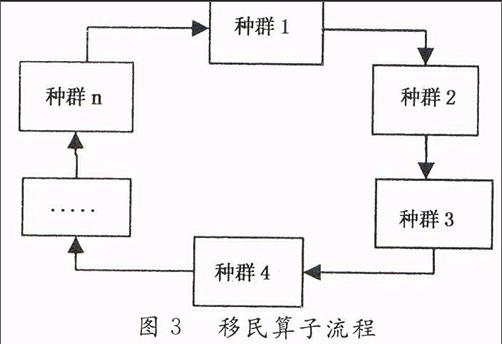

针对标准遗传算法解决机器人处于障碍环境下寻找最优路径局部寻优精度较差、规划效率低的问题,提出一种改进遗传算法的机器人路径规划方法。该算法采用一维编码表示路径, 构造了路径最优化的目标函数和适应度函数,利用多个种群拓宽搜索空间,提高了规划效率,采用保优选择策略,避免陷入局部最优。仿真结果表明,改进遗传算法比标准遗传算法路径规划质量高,能够获得平滑的低代价路径,稳定性好,是机器人路径规划的一种较好的方法,且具有一定的推广意义。
机器人路径规划问题一直是机器人学的一个重要研究课题. 也是目前研究的热点领域。机器人路径规划问题是指在有障碍物的工作环境中, 如何寻找一条从给定起点到终止点的较优的运动路径, 使机器人在运动过程中能安全、无碰撞地绕过所有的障碍物, 且所走路径最短.本质是多约束多目标的最优化问题[1]。
采用智能优化算法求解航迹规划问题是目前使用的主流方法。文献[2]中,蚁群算法的机器人路径规划需要存储的信息多,在搜索过程中易出现停滞现象或陷入死循环;文献[3]中的人工势场法虽便于底层的实时控制,但缺乏全局信息,存在局部最优值的问题;文献[4]中,模糊推理法最大的优点是实时性非常好, 但是模糊隶属函数的设计、模糊控制规则的制定主要靠人的经验。遗传算法[6]已证明是一种全局搜索能力强的算法,具有强的鲁棒性,并行性,但大量实验结果表明,应用标准遗传算法对该问题求解时局部寻优精度较差,稳定性不好[6]。
对此,本文提出一种改进遗传算法的机器人路径规划方法,并进行了仿真实验,结果证明了该方法是有效可行的。
结束语
针对标准遗传算法解决机器人处于障碍环境下寻找最优路径局部寻优精度较差、规划效率低的问题,提出一种改进遗传算法的机器人路径规划方法,并进行仿真,实验表明该算法具有高的稳定性,并减少了陷入局部最优的可能,且规划出的路径精度更高。同时,提出的模型可引申应用于类似情况下的路线规划问题,具有一定的推广意义。
