三维前视声呐信号处理方法
2015-09-04刘治宇刘晓东董飞刘小刚
刘治宇,刘晓东,董飞,刘小刚
三维前视声呐信号处理方法
刘治宇,刘晓东,董飞,刘小刚
(中国科学院声学研究所海洋声学技术实验室,北京100190)
三维前视声像声呐是安装在小型水下载体上的重要声学探测设备。提出了基于波达方向估计技术的三维前视声呐信号处理方法,接收阵水平方向采用波束形成技术,垂直方向采用波达方向估计技术。在波束内采用分裂孔径相位法提高水平方向分辨率,形成声呐阵前方的三维声像。仿真结果和水池实验结果表明:在接收阵面面积相同的条件下,能够获得优于常规技术的分辨率,可以实现点目标和连续目标的探测,适合于在水下载体上安装使用。
波束形成;波达方向估计;相位法;三维前视声呐
0 引言
随着海洋开发和利用越来越被重视,应用于近海底观测的各种水下载体发展迅速,如自治无人水下机器人、遥控水下机器人和载人水下机器人等。三维前视声像声呐用于探测载体前方三维空间内障碍物、目标和海底,并进行声成像。由于水下载体速度的要求,以及空间和功耗的限制,安装在小型水下载体上的三维前视声像声呐应该具有体积小、重量轻、功耗低和分辨率高的特点。
传统的三维前视声呐主要采用接收平面阵的二维波束形成技术,其分辨率受波束角宽限制,要求阵面尺度大,系统复杂[1]。如果采用二维波达方向估计技术虽然提高了分辨率,但是在空间中同时到达的回波个数较多的复杂情况下,不能有效地分辨出多个目标[2]。文献[3]利用水平方向波束形成技术和垂直方向波达方向技术,垂直方向的波达方向(Direction of Arrival, DOA)估计技术可分辨多个目标,适合于近水面和近海底的应用,可以有效提高垂直方向的分辨率,但水平方向的分辨率较低。
为了克服以上几种方法的缺点,本文采用了一种波束形成技术、相位法和波达方向估计技术相结合的信号处理方法。通过水平方向的波束形成将波束指向特定的方向,提高该方向的信噪比并减少同时到达声呐阵的信源个数;在垂直方向采用波达方向估计技术,提高垂直方向的分辨率;并在水平方向的波束内,采用分裂孔径相位法提高对连续目标的水平方向分辨能力。利用这样的信号处理方法,可以在阵面尺寸较小的情况下,有效地探测声呐阵前方目标和地形,并提高水平和垂直两个方向的分辨率,使用该方法的声呐阵更适合安装在小型水下载体上。
1 信号处理方法
本文提出的信号处理方案是针对安装在小型水下载体上的三维前视声像声呐,其信号处理流程中关键技术是结合波束形成技术、相位法和波达方向估计技术,信号处理总体流程如图1所示。在水平平面内采用波束形成技术形成多个水平方向的波束,波束宽度约为7°;在波束内,采用相位法求出水平方向的入射角,提高探测连续目标的水平方向分辨率;同时在垂直平面内采用波达方向估计技术求出垂直方向的入射角,最后利用这两个方向的入射角度和回波到达时间等信息计算出散射点在三维空间中的位置,得到声像。
由于在波束内采用相位法,可以在较宽波束内提高水平方向分辨率,因此可减少水平基元个数,减小阵面尺寸。
下面分别对其中所使用的各种信号处理技术进行阐述。
1.1 水平方向波束形成
频域波束形成采用快速傅里叶变换(Fast Fourier Transform, FFT)同时形成多个指向不同角度的波束,频域波束形成的计算方法为[4]
与延时加权求和的时域波束形成相比,采用FFT波束形成方法能够加快计算速度,提高计算效率,但是FFT中波束序号是整数,所以FFT只能形成有限个特定角度的波束。由于水下载体的姿态通常比较好,不需要做实时的姿态稳定,因此只要这些波束能够覆盖声呐阵前方区域,固定的波束形成角度对声成像不会产生影响。
波束形成技术的作用类似于空间滤波,可以保留波束指向角方向的增益并压制偏离波束指向角的散射点,所以只需要考虑波束中心在海底投影附近的散射点的影响。波束主瓣宽度与波束指向角的大小有很大关系,波束指向正下方,即波束指向角为零时,波束主瓣最窄;而当波束指向角变大时,波束主瓣在海底的投影变宽,而且投影在波束中心的两侧不对称。如果直接采用波束形成后的结果进行判别,则测深结果的分辨率较差。
1.2 分裂孔径相位法
分裂孔径相位法的基本原理[5-8]是:把接收阵分成两个完全相同的子阵,子阵波束形成后,等效于将接收阵面转向波束指向角,波束中心上的散射元正好位于两个子阵的等效中心连线的垂直平分线上,也就是说波束中心点到达两个子阵的相位差为零。
而偏离波束中心的水平入射角也可以利用它与两子阵相位差之间的对应关系计算得到。令两个子波束的同相分量和正交分量分别为1,2,1,2,可以利用共轭相乘的方法来提取相位差,计算公式为
(3)
其中:是两个子阵间隔的基元间隔;是波数;是波束指向角;是实际角度与波束指向角的偏差。在远场条件下,相位差为零时的方向对应于波束指向角,此时有。所以由相位法计算出水平方向的实际角度为
利用上述相位法估计回波入射角的优点是能够有效地利用波束内几乎所有相位差信息来估计所有散射点的回波入射角度,对于连续目标能够得到比较精确的角度估计结果。但是它的缺点是只能分辨波束内同时到达的一个目标,无法分辨同时到达的多个目标。此外,对于声呐阵正前方的目标,相位差变化的区间太小,相位差曲线任何一点细微的抖动都会给最终的估计结果带来较大的误差,所以相位法不适用于正前方的目标。
1.3 信源数估计
波达方向估计算法多采用基于特征子空间的算法,它利用信号子空间与噪声子空间的正交性估计来波方向,需要预先知道信源个数。而当信号源数估计不正确时,也就是对信号子空间和噪声子空间估计不准,即两者不完全正交,会造成对估计信号源时的虚警或者漏警,也就会造成在估计信号方向时的偏差,所以波达方向估计技术中的首要问题是信源数估计问题。
文献[9]提出了一种基于特征空间的信源数估计方法,它将阵列信号的协方差估计值分别投影到信号的特征子空间和噪声子空间。由于信号子空间与噪声子空间相互正交,易于由表征投影大小的判据值区分信号和噪声的贡献,得到了性能优良的信源数估计方法。该方法优于传统的盖氏圆法,而且不需要人工输入信号阈值,可以实现自动的阈值设定,具有一定的实用价值。
1.4 波达方向估计
在垂直平面内对做完波束形成后的信号用波达方向估计技术求入射角,系统中采用旋转不变子空间(Estimation of Signal Parameters via Rotational Invariance Techniques, ESPRIT)算法,利用数据协方差矩阵信号子空间的旋转不变特性估计信号参数。与其他方法相比,ESPRIT算法不需要进行谱峰搜索,计算量比较小,计算速度比较快。
ESPRIT算法的原理[2]是:认为相邻子阵间存在一个固定间距,这个固定间距能反映出各相邻子阵间的旋转不变特性。ESPRIT算法就是利用这个子阵间的旋转不变性实现阵列的DOA的估计。
式中:是发射信号,是空间阵列的流型矩阵,旋转不变关系,则子阵1的阵列流型,子阵2的阵列流型,是两个子阵阵列流型的合并形式,噪声一般是零均值高斯白噪声,与信号不相关。
对接收信号的协方差矩阵进行特征分解可得:

(7)
本文采用实值空间总体最小二乘的ESPRIT算法[2](Unitary TLS-ESPRIT),对常规ESPRIT算法的改进主要表现在以下几个方面:
(2) 进行双向平滑,减小估计误差,显著增强了对相关性较强的回波信号的处理。可以进行对估计结果的有效性判决。
2 仿真结果
为了验证将波束形成技术、相位法和波达方向估计技术三者相结合的信号处理算法的性能,在Windows平台上用Matlab 7.0进行仿真计算。仿真实验中,平面接收声呐阵选用16×6个阵元,相邻阵元间隔为半波长,有效阵面大小为80 mm×30 mm。发射信号带宽为10 kHz、中心频率为150 kHz的chirp信号;实验目标设定为声呐阵前方三维空间中的一根杆,杆中心点P到参考点的距离为75 m;水平方向入射角为45°,垂直方向入射角为30°,信噪比为20 dB。产生仿真数据的方法见参考文献[10]。
采用本文提出的信号处理方法仿真计算出的角度如图2所示。与实际散射点的入射角度相比,水平方向入射角的均方根误差为1.1037°,垂直方向入射角的均方根误差为0.9141°。
对于有效阵面大小相同的平面声呐阵,分别采用结合波束形成技术、相位法和波达方向估计技术的新方法与采用常规二维波束形成方法在入射角度估计上的误差比较见表1。可以看出,结合波束形成技术、相位法和波达方向估计技术的新方法能够获得较高的水平分辨率和垂直分辨率,优于常规二维波束形成技术。
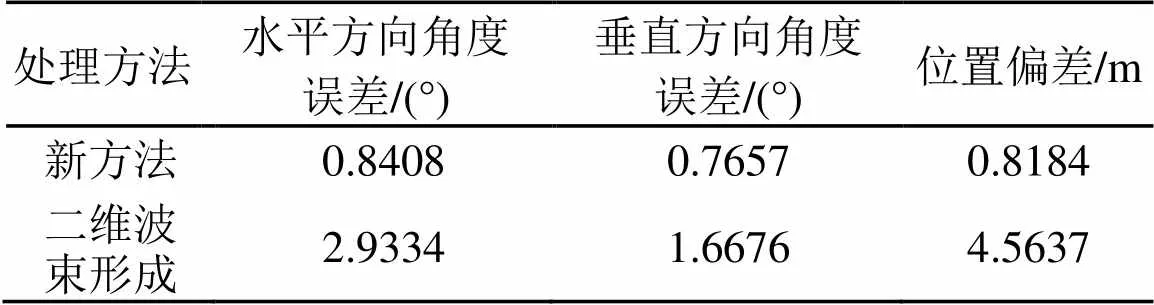
表1 两种方法计算出角度的误差
3 水池试验结果
声呐阵元布设图见图3,发射阵的中心基元用于发射,周围8个基元为哑元,为中心发射基元提供必要的边界条件,保证中心基元能够实现宽覆盖发射,水平、垂直方向波束开角可达到85°×85°。单基元发射能够实现宽覆盖,但发射灵敏度低,影响系统的作用距离。
接收阵为18×8基元的平面阵,中间16×6个基元接收,边缘基元为哑元,每个阵元单独引线。它可在水平平面内形成约7°的窄波束。声呐阵尺寸较小,有效阵面尺寸为80 mm×30 mm,非常适合安装在水下载体头部。
为了验证方法的有效性,课题组在某消声水池开展了目标探测试验和池壁探测试验。该水池长约13 m,宽为7.5 m,深为5 m,其各侧面及上下表面均覆盖有消声瓦。试验时将声呐舱固定于航车的吊架上,通过该吊架可以根据需要在水池内任意部位吊放声呐系统。本实验将声呐舱吊放于水池中间且距离水池后壁约1.5 m处,入水深度为2.5 m。利用CPCI信号处理机采集并存储原始AD数据,采用上述信号处理方法对原始AD数据处理得到声呐阵前方图像。
目标探测试验选用两个典型目标。目标1为空心圆柱,直径为18 cm,高度为30 cm,吊放于声呐阵右前方。目标2为空心球,直径为33 cm,吊放于声呐阵正前方。两目标均悬于水中,距池底2.5 m,中心高度相同,水平距离为0.4 m,试验具体布设情况见图4。从图5的图像结果可以看出,该信号处理方法可以分辨出两个目标,图像中目标的位置与实际相吻合,水平方向采用的相位法技术可以恢复目标的多个散射点,具有高的水平分辨率。
池壁探测试验的结果如图6、7所示。由于水池前壁布有吸声尖劈,部分散射点的回波较弱,图像点呈不均匀分布,见图6。但是从上方看,所有图像点基本在同一个平面,见图7。池壁探测试验表明,该方法可以恢复出连续目标的图像,具有高的水平分辨率和垂直分辨率,声呐测距误差为18.78 cm。利用池壁探测试验采集的原始AD数据,采用二维波束形成技术得到的测距误差为37.48 cm。如利用文献[3]提出的方法,则测距误差为31.63 cm。从以上比较可以看出,该方法在声呐阵有效阵面比较小的条件下,能够获得优于常规技术的水平分辨率和垂直分辨率。
4 结论
应用在小型水下载体的三维前视声像声呐有体积小和分辨率高这两个方面的技术要求,本文提出了一种将波束形成技术、分裂孔径相位法和波达方向估计技术相结合的方法。水池试验结果表明,该方法在声呐阵有效阵面比较小的条件下,能够获得优于常规技术的水平分辨率和垂直分辨率,测距误差小于20 cm,适合在小型水下载体上应用。
[1] 李启虎. 声呐信号处理引论[M]. 2版, 北京: 海洋出版社, 2000, 167-169.
[2] 王永良. 空间谱估计理论与算法[M]. 北京: 清华大学出版社, 2004, 26-28.
[3] Kraeutner P, Brumley B, Guo H, et al. Rethinking forward-looking sonar for AUV’s: combining horizontal beamforming with vertical angle-of-arrival estimation[C]// Oceans 2007 MTS/IEEE Conference proceedings, 2007: 1-7.
[4] Roger G Pridham, Ronald A Mucci. A novel approach to digital beamforming[J]. J Acoust Soc Am, 1978, 63(2): 425-435.
[5] Luren Yang, Torfinn Taxt. Multibeam sonar bottom detection using multiple subarrays[C]// Proc Oceans’ 97, 1997: 932-938.
[6] Yoshida Z, Asada A, Ikeda Y, et al. High precision survey by the multi-beam sonar in the dam site[C]// OCEANS 2004 MTS/IEEE Conference Proceedings, 2004: 1133-1138.
[7] Fairfiel N, Wettergreen D. Active localization on the ocean floor with multibeam sonar[C]// OCEANS 2008 MTS/IEEE Conference Proceedings, 2008: 1-10.
[8] 李海森, 周天, 徐超. 多波束测深声呐技术研究新进展[J]. 声学技术, 2013, 32(2): 73-80.
LI Haisen,ZHOU Tian, XU Chao. New developments on the technology of multi-beam bathymetric sonar[J]. Technical Acoustics, 2013, 32(2): 73-80.
[9] 朱维庆, 胡隽, 刘晓东, 等. 波达方向估计中的特征空间的信源数估计方法[J]. 声学学报, 2009, 34(3): 97-102.
ZHU Weiqing, HU Juan, LIU Xiaodong, e al. Source number estimation using eigenspace in direction of arrival estimate[J]. Acta Acustica, 2009, 34(3): 97-102.
[10] Gueriot D, Sintes C. Forward looking sonar data simulation through tube tracing[C]// OCEANS 2010 IEEE Sydney, 2010: 1-6.
Signal processing method for 3D forward-looking sonar
LIU Zhi-yu, LIU Xiao-dong, DONG Fei, LIU Xiao-gang
(Laboratory of Acoustic Technology,Institute of Acoustics, Chinese Academy of Sciences,Beijng100190, China)
A signal processing method for 3D forward-looking Sonar based on Direction of Arrival Estimation is presented. Beamforming is used in horizontal direction of the receive array, and DOA estimation is employed in vertical direction. Phase estimation is also implemented to improve the resolution in horizontal direction for detecting continuous target. Finally the 3D image in the front of sonar array is formed. The results of tests show that the method can get higher resolution than the sonar using beamforming with the same area of receiver array. The sonar using the method is more suitable for underwater vehicles.
beamforming;direction of arrival estimation;phase estimation; 3D forward-looking sonar
TB565
A
1000-3630(2015)-04-0317-05
10.16300/j.cnki.1000-3630.2015.04.005
2014-07-16;
2014-10-12
国家863计划项目(2006AA09Z119)
刘治宇(1978-), 男, 辽宁沈阳人, 博士, 副研究员, 研究方向为水声信号处理、阵列信号处理。
刘治宇, E-mail: liuzhiyu@mail.ioa.ac.cn
