基于多Kinect的三维人体重建系统
2015-08-24朱江涛吴以凡
朱江涛,吴以凡,周 亮
(杭州电子科技大学 计算机学院,浙江 杭州 310018)
基于多Kinect的三维人体重建系统
朱江涛,吴以凡,周亮
(杭州电子科技大学 计算机学院,浙江 杭州 310018)
结合KinectFusion 技术,设计并实现了一种基于多台Kinect的三维人体重建系统.该系统使用两台Kinect分别采集人体上下两部分的点云数据,通过标定得到两台Kinect的姿态关系,并基于标定结果,使用迭代最近点(ICP)算法对两部分点云进行配准得到完整的人体三维模型.试验表明,系统设备成本低、部署简单,能快速并较高精度地获取人体三维点云.
三维人体重建;Kinect;KinectFusion;标定;点云配准
三维人体重建技术在虚拟现实、动漫产业、纺织业、服装设计等领域有着重要应用,也是近年来计算机视觉领域的一个热门研究课题[1].基于结构光、激光的三维扫描系统目前已经比较成熟,重建数据精度高,但系统操作复杂、设备昂贵,此类人体扫描、重建系统价格一般在35 000~500 000美元,不适合普通用户使用[2].随着微软Kinect的推出,其体积小、价格低廉、易使用等特性,使得深度摄像机走向大众,出现了许多基于Kinect的三维重建系统[3-5].由于Kinect摄像头获取的原始深度数据比较粗糙[6],系统在兼顾重建精度和速度方面大多有待提高.文献[7]提出了一种利用3台Kinect对有轻微形变的人体进行重建的方法,通过局部配准与全局优化的反复迭代来获得最终人体模型.该方法需先对人体进行建模,会一定程度地影响效率,对于某些应用场景而言,最终人体模型的质量也不够高且有时存在配准失败问题.文献[8]提出的KinectFusion技术,通过手持一台Kinect并移动扫描,在任意光照条件下,能够实时、快速地创建房间级大小的复杂场景且富含细节的三维模型.其建立一个全局表面模型,并将Kinect 深度图像数据不断融入模型,逐步丰富完善模型,重建精度可达毫米级.
本文将提出一种基于多台Kinect的三维人体重建系统,使用两台位置固定的Kinect和一个匀速转台.系统运行前,先对两台Kinect进行标定,获得两台Kinect之间的姿态(水平距离、旋转角度)关系;系统运行过程中,人站立于匀速转动的转台,两台Kinect通过KinectFusion技术分别采集、融合得到人体上下两部分的点云;采集结束后,利用标定得到的参数对两片点云进行预处理,再使用迭代最近点(iterative closest point,ICP)算法进行配准得到完整的人体点云.该系统硬件成本低,操作部署简单.
1 三维人体重建系统概述
1.1硬件平台
Kinect默认模式的可视范围是0.8~3.5 m,Kinect与待扫描物体间的推荐距离为1.5~2.0 m,可视角度为垂直方向43°、水平方向57°,垂直方向上下倾斜角度为±27°[9].Kinect的可视空间如图1所示.

图1 Kinect可视空间Fig.1 Kinect’s field of view
综合考虑采集数据的精度和测量范围,系统的平台搭建如图2所示.

图2 硬件平台Fig.2 Hardware platform
待重建人体站立于匀速转台上,与转台中心距离为D处垂直树立一固定杆.在固定杆离地高度H1处固定第一个Kinect,在固定杆上第一个Kinect上方距离为H2处固定第二个Kinect,两台Kinect均面向人体.
Kinect与待扫描物体间的距离越近,测量越精确,为达到最佳测量效果,本文设定Kinect与待重建人体之间的距离为1.5 m,即D=1.5 m.设在距离为D处两台Kinect分别能扫描的人体高度为H,已知Kinect垂直方向可视角度θ=43°,则由几何关系可得:
H =2×tan(q/2)×D
(1)
则计算可得H=1.18 m.
为确保第一台Kinect能完全扫描到人体的双脚,其离地最大高度为H/2=0.59 m,考虑待测人体的初始站位可能偏离中心靠外,故取H1=0.5 m 使得第一台Kinect的中心离转台中心更近,以确保双脚的精度.设待测人体身高为h,则要求两台Kinect的扫描高度不小于h,即
H1+H2+H/2≥h
(2)
h越大,则要求相应的H2越大.若H2越大,两台Kinect的重叠部分高度H′ 则越小,H′ 是后续上下两部分点云配准融合的关键,重叠越多(即H′越大)则配准融合越精确.权衡可测人体身高范围和后续点云融合精度,取可测人体身高h=2.0 m,相应的H2取0.9 m.重叠部分H′为
H′=2×(H/2)-H2
(3)
代入H和H2计算可得H′=0.28 m.
在系统运行过程中,转台顺时针匀速转动,Kinect持续扫描人体,不断融合并逐步丰富完善细节,最终得到人体模型.
1.2软件流程
系统的数据处理流程主要包括标定、采集、配准3个部分,如图3所示.

图3 数据处理流程Fig.3 Flowchart of data processing
系统启动后,首先初始化系统参数,设定Kinect深度帧分辨率、帧率,初始化KinectFusion相关参数.采集阶段,上下两台Kinect同时启动,分别执行相同的数据处理流程:每采集到一帧深度数据,KinectFusion将其融入全局表面模型,并使用ICP算法估计当前Kinect位置,采集结束则将其表面模型输出为人体三维点云.配准阶段,先对两片点云分别进行去噪处理,再基于Kinect标定所得参数,调整两片点云,对调整后的两片点云用ICP算法进行配准,最终得到完整的人体三维模型.其中,标定过程只需在系统硬件平台搭建完成后执行一次.
2 三维人体点云获取
2.1KinectFusion 技术
KinectFusion技术通过将 Kinect实时采集的深度数据帧融入一个全局表面模型,可实时、快速地建立物体的三维模型.全局表面模型是待重建物体所在空间中一个虚拟的立方体(volume),它用来包含物体的三维信息.随着Kinect的移动,待重建物体不同视角的深度图像被不断地融入该立方体,三维模型也就不断地精细,最终由该模型得到物体的三维点云.
与已有的一些三维重建技术相比,KinectFusion有如下一些优势:能够实现实时的相机位置追踪和三维物体重建;由于KinectFusion只使用了深度帧数据,因而不受光线影响,重建的精度更高.
2.2点云获取
为了保证深度数据的质量,设定Kinect的深度图像帧分辨率为640像素×480像素,帧率为30帧/s.初始化KinectFusion立方体参数并启动扫描过程.点云获取过程如图4所示.对于两台Kinect各自采集的每一帧深度图像,分别做如下处理:第一步,深度图像转化,将原始的深度图像转化为相机坐标系中三维顶点和法线;第二步,相机追踪,使用基于GPU实现的ICP算法,配准当前帧和上一帧数据,得到当前的Kinect相机姿态(位置和方向);第三步,立方体融合,已知当前的相机姿态,则可以将当前得到的顶点转化到全局坐标系中,并更新相应小立方体(体素)的数值;第四步,光线投射,对立方体进行光线投射,得到立方体渲染的可视化图像.移动的Kinect会从细微变化的不同视角去看一个表面,任何在原始Kinect图像中看不到的孔洞都会被填充,立方体中的数据也会被不断改善.考虑到每帧数据处理过程存在着大量的计算,消耗较多的CPU和GPU资源,非中高端硬件配置的计算机处理30帧/s的帧率会出现不流畅现象,扫描过程中,对帧率作降频处理,保证处理的流畅性.
扫描完成后,由两台Kinect各自的立方体数据计算得到人体的上下两部分的网格数据,并将网格数据保存为PCD(point cloud date)点云格式以便后续的点云预处理和配准.
图4点云获取过程
Fig.4Procedures of point cloud acquisition
2.3点云配准

两台Kinect姿态关系由标定过程得到,采用棋盘格标定方法[10]对两台Kinect同时标定,如图5所示.其中,Oxyz为摄像机坐标系;OXYZ为图像坐标系;OXwYwZw为世界坐标系;p1和p2为空间上一点P在图像坐标系上的投影.
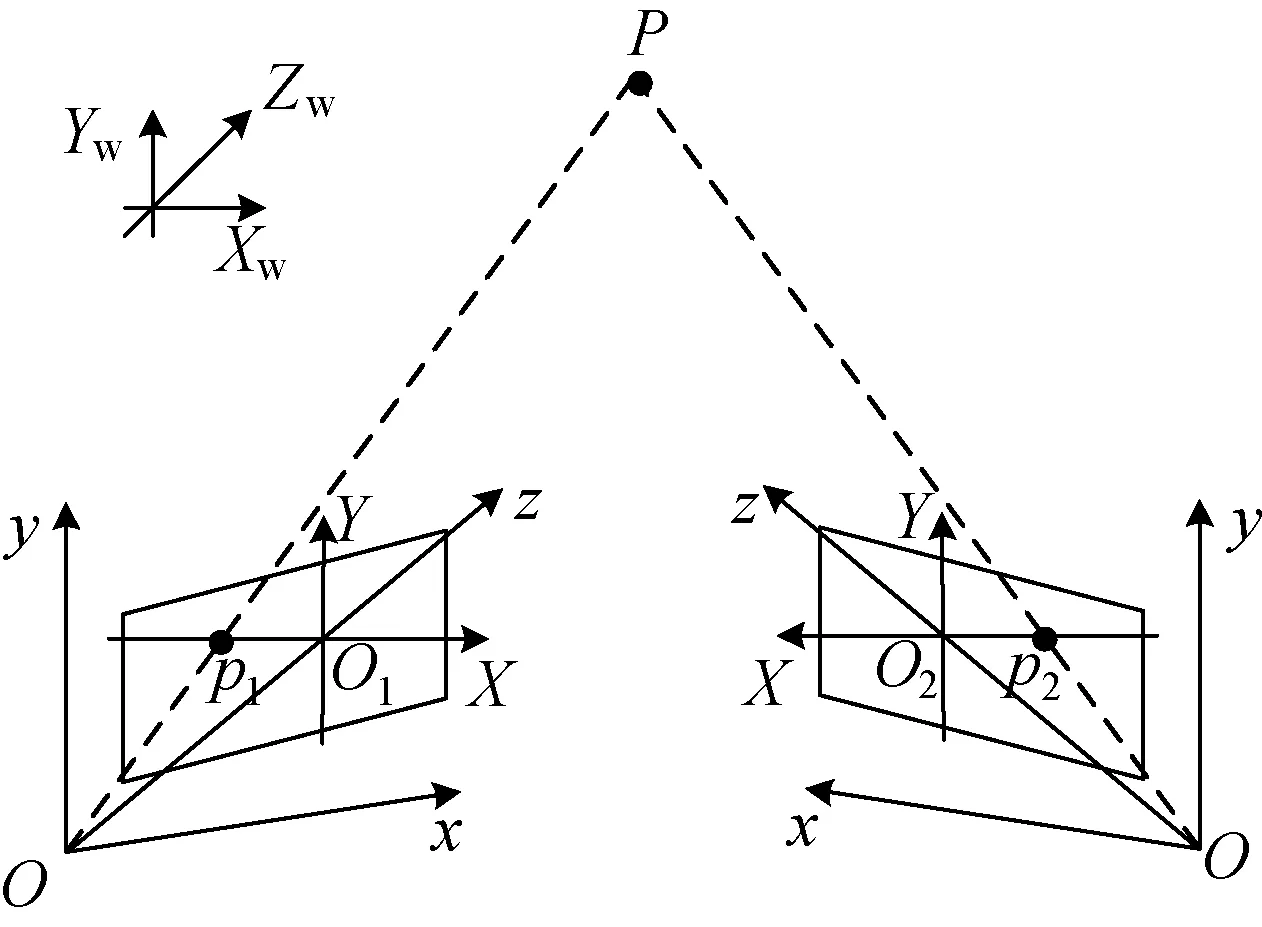
图5 Kinect标定Fig.5 Kinect calibration
由棋盘格标定结果可知p1和p2到P点的三维变换分别为
(4)
(5)
其中:A1和A2分别为Kinect的3×3内参矩阵;R1和R2为3×3旋转矩阵;T1和T2为3×1平移矩阵.
联立式(4)和(5)可得p1到p2的三维变换矩阵(即参数矩阵)[R|T]:
(6)
其中:R和T分别为旋转矩阵和平移矩阵.
(7)
调整算法如下:
(1) 调整开始,创建点云C″1=∅;

(8)
然后将P′加入到C″1中;
(3) 输出C″1,调整结束.
调整后,点云C1″和C2′坐标系相同.由于Kinect标定存在一定的误差,经过调整后的两片点云配准效果还不理想,需要再通过ICP算法完成两片点云的进一步精确配准.

3 实验结果
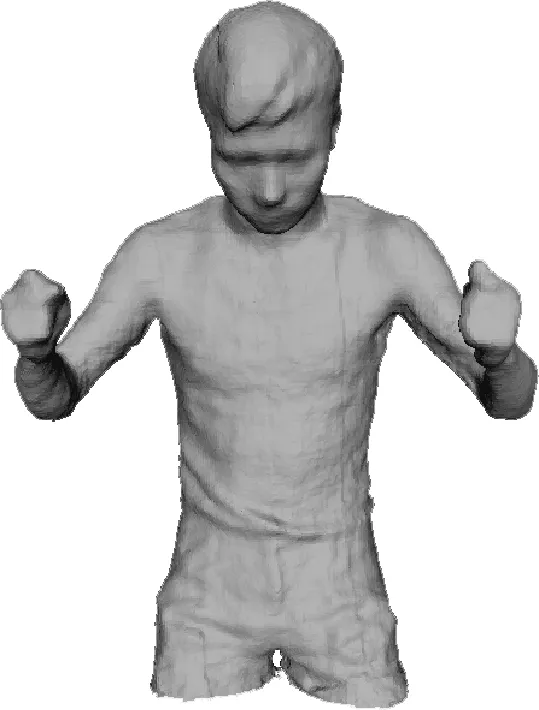
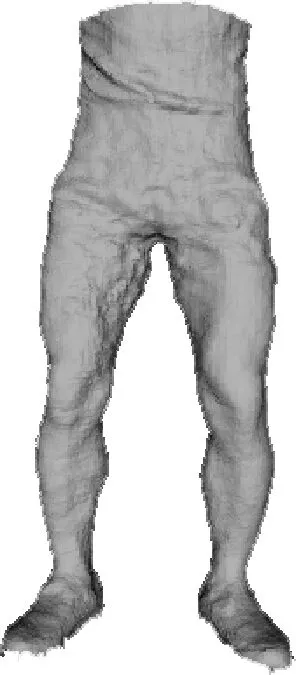
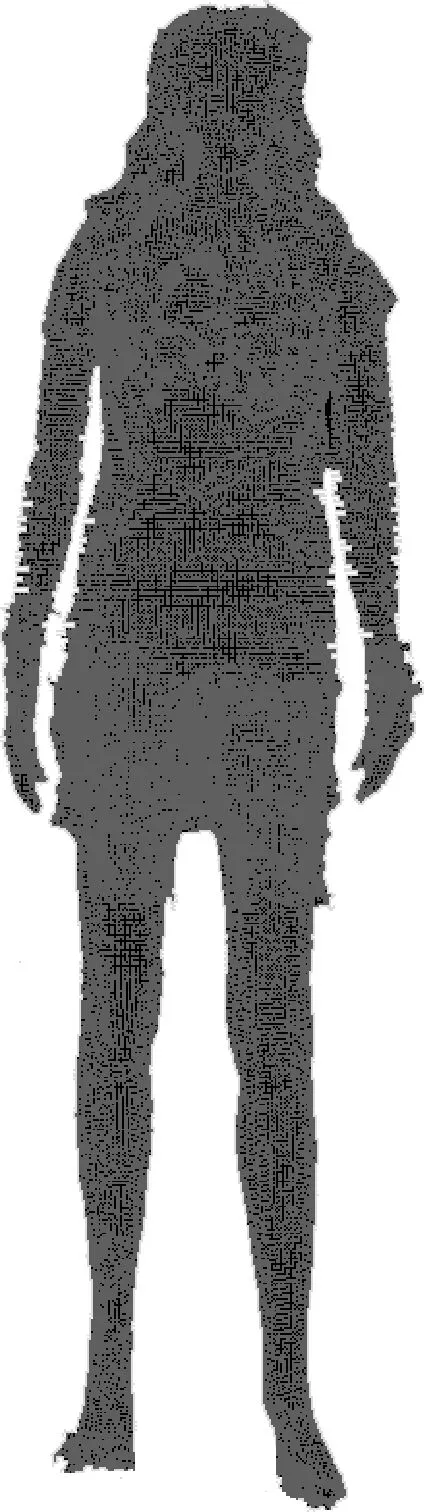
系统开发平台为Visual Studio 2010,Intel® CoreTM i3-3220 处理器,NVIDIA GeForce GTX 650 显卡.图6和7分别为实际人体和塑料人台的三维重建过程.其中图(a)和(b)分别为上下Kinect采集的人体三维数据;图(c)为经过去噪和调整后两片点云同时显示在同一坐标系中的结果;图(d)为配准后的最终人体三维点云,且图(c)和(d)为三维点云数据,无阴影和光照效果.
图6(a)中人体所穿背心(厚度约为2 mm)及图7(a)中模特衣服纹理均清晰可辨,表明由KinectFusion采集获取的三维人体模型具有较高的精度.由图6(c)和图7(c)可知,经过去噪、调整,两片点云整体上有了初步的匹配效果,但在扫描的重叠部分,仍存在误差.由图6(d)和7(d)可知,通过配准可消除人体上下两部分点云在旋转角度、平移方面的误差,配准后的三维人体点云在拼接处曲面光滑,配准效果比较理想.
(a)
(b)

(c)

(d)图6 实际人体的三维重建Fig.6 3D reconstruction of human body

(a)

(b)

(c)
(d)图7 塑料人台三维重建Fig.7 3D reconstruction of plastic model
4 结 语
由于受成本、操作复杂度等方面的影响,已有的三维人体重建系统应用范围受到限制.本文介绍了一种基于多台Kinect的三维人体重建系统,该系统使用两台Kinect同时分别扫描人体上下两部分,扫描结果经由数据处理系统去噪、调整、配准,最终得到完整的人体三维点云.系统基础设备较少、成本低廉,可在任意光照条件下,快速重建出精度较好的三维人体模型,能满足一般的应用需求.后续研究将侧重于进一步提高系统的稳定性,解决偶尔出现的KinectFusion扫描过程中由相机追踪失败引起的扫描失败问题.
[1] 黄敏,杨念,张剑.基于雅可比算法的着装人体三维重建[J].东华大学学报:自然科学版,2007,33(5):607-612.
[2] WEISS A,HIRSHBERG D,BLACK M J.Home 3D body scans from noisy image and range data [C]∥ IEEE International Conference on Computer Vision.2011:1951-1958.
[3] 宋诗超,禹素萍,许武军.基于Kinect的三维人体扫描、重建及测量技术的研究[J].天津工业大学学报,2012,31(5):34-41.
[4] 刘鑫,许华荣,胡占义.基于GPU和Kinect的快速物体重建[J].自动化学报,2012,38(8):1288-1297.
[5] 周瑾,潘建江,童晶,等.使用Kinect快速重建三维人体[J].计算机辅助设计与图形学学报,2013,25(6):873-879.
[6] NEWCOMBE R A,IZADI S,HILLIGES O,et al.KinectFusion:Real-time dense surface mapping and tracking [C]//10th IEEE International Symposium on Mixed and Augmented Reality.2011:127-136.
[7] TONG J,ZHOU J,LIU L G,et al.Scanning 3D full human bodies using Kinects[J].Visualization and Computer Graphics,2012,18(4):643-650.
[8] IZADI S,KIM D,HILLIGES O,et al.KinectFusion: Real-time 3D reconstruction and interaction using a moving depth camera[C]//Symposium on User Interface Software and Technology.2011.
[9] Kinect for Windows sensor components and specifications [EB/OL].[2013-11-21].http://msdn.microsoft.com/en-us/library/jj131033.aspx.
[10] ZHANG Z Y.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(11): 1330-1334.
[11] LIU Y H.Automatic registration of overlapping 3D point clouds using closest points[J].Image and Vision Computing,2006,24(7):762-781.
[12] 朱德海.点云库PCL学习教程[M].北京:北京航天航空大学出版社,2012:302-303.
3D Human Body Reconstruction System Based on Multiple Kinects
ZHUJiang-tao,WUYi-fan,ZHOULiang
(College of Computer,Hangzhou Dianzi University,Hangzhou 310018,China)
A new 3D human body reconstruction system based on multiple Kinects is proposed using the KinectFusion technology.In this system,two Kinects are used to scan the up and down half of human body and acquire the point cloud data respectively,then the relationship between the pose of two Kinects obtained by calibration and iterative closest point(ICP)algorithm are used to complete the registration and build the whole 3D human body model.Experiments prove that this system can obtain whole point cloud of the 3D human body rapidly with a good precision while the devices are cheap and system is easy to install.
3D human body reconstruction; Kinect; KinectFusion; calibration; point cloud registration
1671-0444(2015)02-0227-05
2013-12-09
国家自然科学基金资助项目(61202093);浙江省重点科技创新团队资助项目(2011R50009)
朱江涛(1989—),男,安徽六安人,硕士研究生,研究方向为计算机应用技术.E-mail: izhujiangtao@163.com
吴以凡(联系人),男,讲师,E-mail: yfwu@hdu.edu.cn
TN 401
A
