基于盲源分离和AR谱估计的旋转机械故障诊断方法
2015-08-10孟宗,梁智
孟 宗, 梁 智
(1.燕山大学电气工程学院,河北秦皇岛066004;2.河北省测试计量技术及仪器重点实验室,河北秦皇岛066004;3.广西壮族自治区特种设备监督检验院,广西南宁530219)
基于盲源分离和AR谱估计的旋转机械故障诊断方法
孟 宗1,2, 梁 智1,3
(1.燕山大学电气工程学院,河北秦皇岛066004;2.河北省测试计量技术及仪器重点实验室,河北秦皇岛066004;3.广西壮族自治区特种设备监督检验院,广西南宁530219)
准确的AR模型能够较好地揭示信号中蕴含的状态特征变化的信息,然而,AR模型对系统的状态变化十分敏感,多个动态变化的源信号的耦合必然会影响其估计结果。基于此,提出了一种基于盲源分离和AR谱估计的旋转机械故障诊断方法。首先,利用盲源分离的方法从混合观测信号中恢复各机械振动源信号;然后,将非平稳性的故障信号通过经验模态分解得到各本征模态函数;最后,对经验模态分解得到的平稳的本征模态函数进行AR谱估计,提取振动信号的故障特征信息。通过仿真研究和实验分析验证了该方法在旋转机械故障诊断中的有效性和可行性。
计量学;盲源分离;AR谱;旋转机械;故障诊断
1 前 言
旋转机械发生故障时,其动态过程非常复杂,仅通过时域或频谱分析很难对系统的工作状态进行准确评估。机械系统的状态变化是一个动态的过程,通过其数学模型的结构、参数和特征函数的变化可以很好地反映系统的客观规律。AR模型的自回归参数包含了系统状态的重要信息,对系统状态的变化规律很敏感。因此可以采用AR模型的自回归参数作为特征向量来分析系统的状态变化[1,2]。然而,大多数机械振动信号均为非平稳信号,而AR模型一般只适用于平稳信号,因此要通过其他手段来将信号进行平稳化处理。此外,由于AR谱对参数变化较敏感,工作环境中的噪声和其它振动源也会对分析过程造成极大的干扰。
由于盲源分离(Blind source separation,BSS)具有的独特的盲辨识能力,它已经被广泛地应用于通讯、语音和图像处理,以及生物医学工程等领域[3~5],一些学者也将其应用到了机械故障诊断领域,并取得了良好的效果[6,7]。本文提出一种基于盲源分离和AR谱进行故障诊断的方法。首先,利用盲源分离将源信号从观测信号中分离出来;然后通过对源信号进行经验模态分解(EMD),将非线性、非平稳信号分解为一系列线性、平稳的本征模态函数[8],从而实现了信号的平稳化;最后,选取感兴趣的源信号的本征模态函数(IMF),建立AR谱进行故障特征分析。
2 盲源分离
盲源分离是指在输入的源信号和混合通道的特性未知的情况下,通过观测信号恢复得到各源信号的方法,其线性瞬时混叠模型为

式中,s(t)=(s1(t),s2(t),…,sN(t))T为N个未知的源信号构成的向量;x(t)=(x1(t),x2(t),…,xM(t))T为源信号经过未知信道传输后由M个观测器接收到的M个观测信号,且M≥N;A为一个未知M ×N维的混合矩阵。盲源分离的目标,就是要寻找到一个N×M阶的分离矩阵W,使得经过分离系统最终的输出信号y(t)=(y1(t),y2(t),…,yN(t))T,是对源信号的估计。
本文采用一种建立在“四阶累积量矩阵对角化”基础上的特征矩阵的联合近似对角化法(JADE)[9]。算法主要由以下几个步骤:
(1)求出观测信号的协方差Rx及白化矩阵W;
(3)通过酉矩阵U把集合Ne联合对角化;
(4)通过A=WU,求出分离矩阵A的估计;
(5)通过盲源分离矩阵B=UHW恢复源信号。
3 AR谱估计
信号的谱估计主要分为参数模型法和非参数模型法,AR谱估计是参数模型法中应用最为广泛的一种方法[10,11]。AR模型的模型参数凝聚了系统状态的重要信息,准确的AR模型能够深刻、集中地反映出动态系统的客观规律。AR谱峰值尖锐,频率定位准确,易于反映功率谱中的峰值信息。AR谱估计的基本思想是先对时间序列信号建立AR模型,再用模型系数计算信号的自功率谱[12]。
AR(N)模型的一般表达式为

式中:y(n)为自回归时间序列;B(n)为具有零均值、方差为σ2的正态分布的有限带宽白噪声;N为模型的阶数。
将式(2)看作一个系统的输入/输出方程,则B(n)可视为系统的白噪声输入,y(n)为系统在有限带宽白噪声激励下的响应输出。
由此,根据自功率谱的定义,利用传递函数可求出信号的单边谱

式中:f∈[0~fs/2.56];Ts=1/fs,fs为采样频率。
4 基于盲源分离和AR谱的故障特征提取方法
基于盲源分离和AR谱估计的故障特征提取方法如下:
(1)将观测信号x(t)=(x1(t),x2(t),…,xM(t))T进行盲源分离,恢复得到各个源信号y(t)=(y1(t),y2(t),…,yN(t))T;
(2)分别对恢复的各个源信号进行EMD分解,每个源信号被分解分别得到一系列的IMF;
(3)分别对各信号的IMF进行AR谱估计,从而提取信号特征。
需要注意的是,对信号进行EMD分解时,是按照频率由高到低的规律得到各个IMF分量的,因此分解得到的前面几个固有模态函数包含了信号的主要信息。所以在实际运用时,只需要对前面几个包含了信号主要信息的固有模态函数建立自回归模型,然后通过其AR谱分析故障特征。基于盲源分离和AR谱估计的故障特征提取方法的流程见图1。
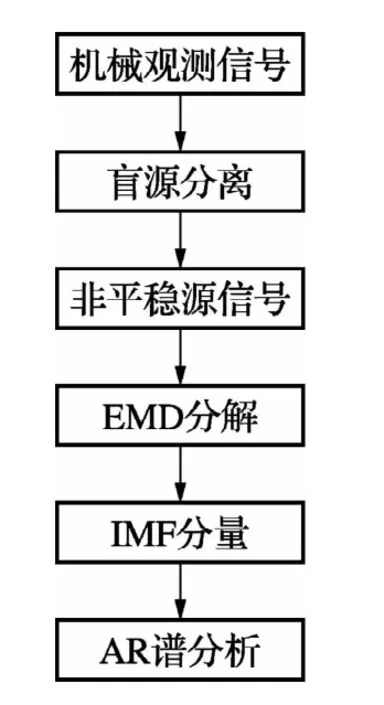
图1 基于BSS和AR谱估计方法
5 仿真研究
考察的仿真源信号为s1(t)和s2(t),机械振动源信号s1(t)为

分析信号s1(t),其基频为30 Hz,信号中包含了一个调频调幅成分,其调频为15 Hz。另外,信号中还有一个正弦成分,其频率为120 Hz。
对信号进行调制频率分析,根据调制信号的计算方法,求得调频调幅部分的角频率为

根据角频率与频率的关系,计算频率f(t):

由上式中可以看出,24≤f(t)≤36。
此外,信号中的调频调幅部分的幅值

由上式,可以看出,信号调幅的频率的大小变化为10 Hz,幅值的大小变化为0.5≤a(t)≤1.5。
s2(t)为一个符合正态分布的随机向量,模拟现实情况中的随机噪声干扰。在盲源分离时,将随机向量s2(t)视为一个独立的源信号,于是得到两个源信号的波形见图2。
在实际的工作环境中,存在着很多振动源或噪声源,它们都有可能对机械设备振动信号造成干扰,通常情况下,这些干扰信号的性质及其与源信号的混合方式是未知的。假设机械振动信号s1(t)受到随机噪声s2(t)的强烈干扰,经过混合后得到的观测信号x1(t)、x2(t)的波形见图3。
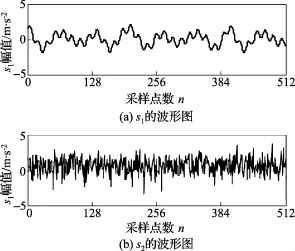
图2 源信号信号的波形图

图3 观测信号的波形图
假如直接对两个观测信进行AR谱估计,得到的AR功率谱图见图4。
由于随机噪声的干扰,机械设备的频率和能量成分极有可能已经被噪声湮没,以上两个功率谱中,并没有明显地表现出机械振动的信号特征变化,因此较难分别出源信号的频率和能量的规律。需要通过盲源分离从观测信号中将随机噪声信号与机械振动信号分离开来。采用基于四阶累积量的特征矩阵联合对角化法处理观测信号,分离得到的源信号的估计信号波形见图5。
由图5可以看出,虽然分离得到的估计信号的顺序和幅值改变了,但通过波形仍然能够分辨出估计信号s′2就是原始的源信号s1,即所要分析机械振动信号。对s′2进行EMD分解。由EMD分解的性质可知,分解得到的IMF的前几个分量中包含了被分解信号的主要信息。取前的两个IMF分量c1和 c2进行AR谱分析,得到图6和图7。
由图7可以看出,固有模态函数c1中存在源信号s1(t)中的正弦分量的频率特征,固有模态函数c2中存在源信号s1(t)中的调频调幅分量的频率特征。通过观察,从AR谱中还能清楚地分辨出能量分布的变化规律。从而可以看出,基于盲源分离和AR谱估计的方法对含噪非线性非平稳信号进行特征提取的分析方法是可行的。

图4 观测信号的AR功率谱

图5 估计的源信号的波形图

图6的EMD分解

图7 c1和c2的功率谱
6 实验分析
在齿轮箱的故障信号诊断实验中,使用电火花加工技术在轴承内圈上布置了单点故障。电机转速为1750 r/min,即轴转动的基频是29 Hz。
齿轮出现局部故障时,故障齿随轴旋转每周啮合一次,产生周期性的冲击信号,啮合频率

式中:n为齿轮所在轴的转速,r/min;z为齿轮的齿数。
轴承出现内圈故障时,滚动体每次通过故障点都会产生一个周期性的冲击信号,内圈故障频率

式中:m为滚动体个数;d为滚动体直径;D为轴承节径;α为接触角;f为轴旋转频率。
经计算可得到齿轮磨损的啮合频率fm为93.1 Hz,轴承的内圈故障频率fi是157.9 Hz。
通过2个加速度传感器采集到的观测信号x1和x2的波形见图8。

图8 观测信号

图9 源信号的估计
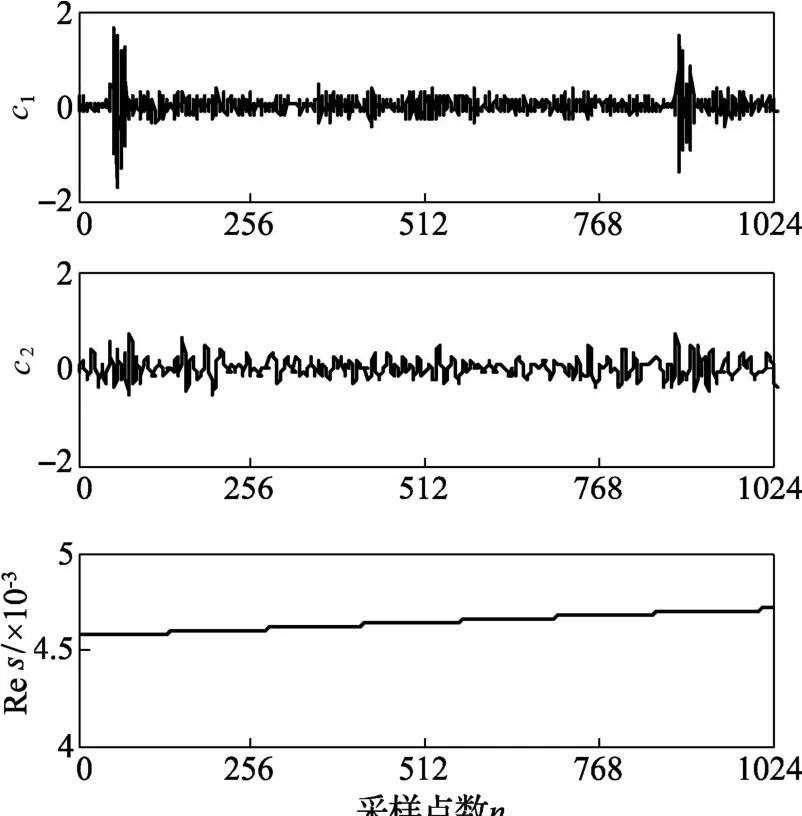
图10′的EMD分解
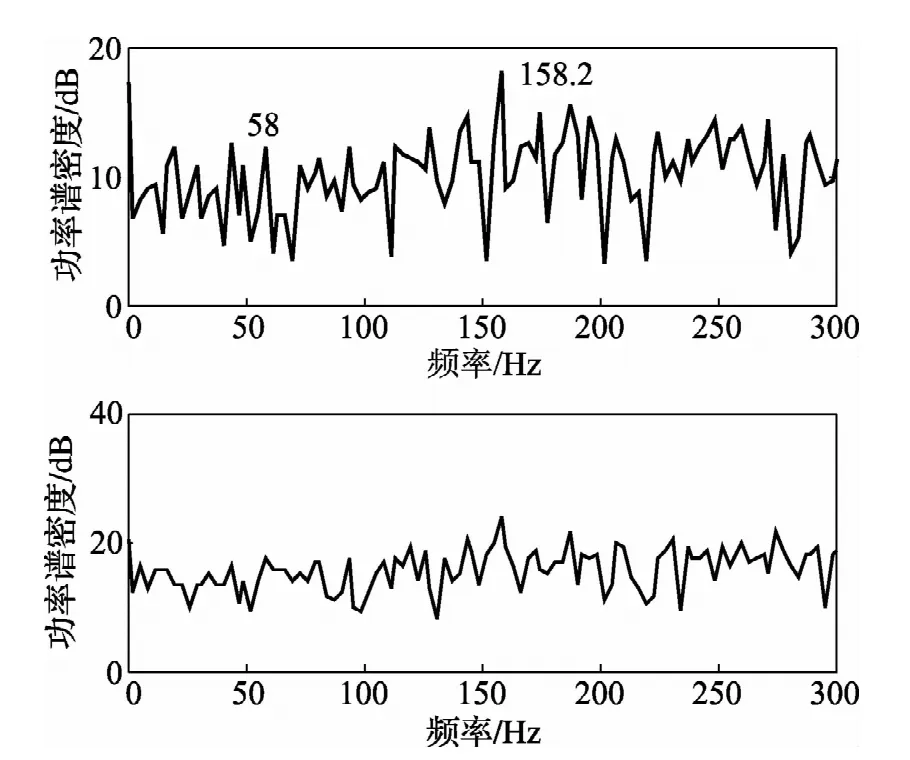
图11的c1和c2的功率谱
根据实验条件,首先要利用小波阈值消噪方法去除两个观测信号中的噪声。然后,根据本文提出的方法,首先对观测信号进行盲源分离,恢复得到的源信号的估计s′1和s′2的波形见图9。对估计信号s′1进行EMD分解,并选取前两个IMF分量进行AR谱估计,得到图10和图11。对估计信号s′2进行EMD分解,并选取前3个IMF分量进行AR谱估计,得到图12和图13。
由图11估计信号s′1的第2个IMF分量c2的功率谱中可以看出,在频率为158.2 Hz处存在一个明显的峰值,其与通过计算得到的轴承的内圈故障频率fi非常接近,误差仅为0.19%,因此可以判断齿轮箱的轴承内圈存在故障。同时,在频率为58 Hz处也有一个波峰,对应基频29 Hz的二倍频。
由图13估计信号s′2的第3个IMF分量c3的功率谱中可以看出,在频率为93.7 Hz处存在一个明显的峰值,其与通过计算得到的齿轮磨损的啮合频率fm非常接近,误差仅为0.64%,此外,从第2个 IMF分量c2的功率谱中可以看到在频率为187.5 Hz处存在一个明显的峰值,接近齿轮磨损的啮合频率fm的二倍频,这种表现与齿轮磨损的现象相符合,因此可以判断齿轮箱的齿轮存在故障。

图12′的EMD分解
7 结 论
准确的AR模型能够深刻、集中地反映出动态系统的客观规律,通过建立旋转机械系统的AR模型,可以很好地了解机械系统工况状态的属性及其变化规律。但是,AR模型对参数变化很敏感,机械设备周围的噪声和其它振动源也会影响AR谱估计的准确性。本文针对这一难题,利用盲源分离具有的独特的盲分离性能,能够在源信号及其混合方式未知的情况下,通过观测信号直接恢复源信号特点,研究了一种基于盲源分离和AR谱估计的旋转机械故障诊断的方法。利用盲源分离将源信号从观测信号中分离出来,然后对源信号进行经验模态分解,实现信号的平稳化,最后基于经验模态分解得到的本征模态函数(IMF),建立AR谱进行故障特征分析,实现旋转机械故障诊断。
]
[1] 杨宇,杨丽湘,程军圣.基于LMD和AR模型的转子系统故障诊断方法[J].湖南大学学报,2010,37(9),24-28.
[2] 孟宗,顾海燕,刘利晖,等.基于EMD与AR谱的轧机主传动系统故障诊断研究[J].计量学报,2011,32(4):338-342.
[3] 崔新春,贺洁,秦小麟.基于盲源分离的多重音频数据库水印算法[J].电子学报,2012,40(1):78-83.
[4] 林秋华,党杰,殷福亮.盲源分离图像加密的相关运算解密法[J].通信学报,2008,29(1):109-114.
[5] 罗志增,曹铭.基于最大信噪比盲源分离的脑电信号伪迹滤波算法[J].电子学报,2011,39(12):2926-2931.
[6] 周晓峰,杨世锡,甘春标.一种旋转机械振动信号的盲源分离消噪方法[J].振动、测试与诊断,2012,32(5):714-717.
[7] 雷衍斌,李瞬酩,门秀花,等.基于自相关降噪的混叠转子振动信号分离[J].振动与冲击,2011,30(1):218-222.
[8] Huang N E,Shen Z,Long S R,et al.The empirical mode decomposition and the Hilbert spectrum for nonlinear and nonstationary time series analysis[J].Proceedings of the Royal of London Series A,1998,454(1971):903-995.
[9] Cardoso J F,Souloumiac A.An efficient technique for blind separation of complex sources[C]//Proc IEEE SP Workshop on Higher-Order Stat,USA,Lake Tahoe,1993.
[10] Bonacci D,Mailhes C.Imprving subband spectral estimation using modified AR model[J].Signal Processing,2007,87(5):937-949.
[11] Subasi A.Selection of optimal AR spectral estimation method for EEG signals using Cramer-Rao bound[J].Computers in Biology and Medicine,2007,37(2):183-194.
[12] 王志刚,李友荣.小波分析-AR谱及其工程应用[J].振动与冲击,2001,20(1):85-87.
The Fault Diagnosis for Rotating Machinery Based on BSS and AR Spectrum Estimation
MENG Zong1,2, LIANG Zhi1,3
(1.Institute of Electrical Engineering,Yanshan University,Qinhuangdao,Hebei066004,China;2.Key Laboratory of Measurement Technology and Instrumentation of Hebei Province,Qinhuangdao,Hebei066004,China;3.Guangxi Special Equipment Supervision and Inspection Institute,Nanning,Guangxi530219,China)
The accurate ARmodel can reveal the changing state characteristics inherent in the signal,however the AR model is sensitive to the changes in the state of the system,and themultiple of dynamic source signal coupling is bound to affect the estimated results.Themethod of blind source separation is reconstructmechanical vibration source signals.Then the non-stationary fault signal is decomposed into several stationary signals which suit to establish AR model.Finally,the AR model of stationary intrinsic mode function is constructed to extract the characteristics of fault vibration signal.The results of simulation and experiment are presented to verify the theory analysis.
Metrology;Blind source separation;Auto regressivemodel spectrum;Rotatingmachine;Fault diagnosis
TB936
:A
:1000-1158(2015)03-0289-06
10.3969/j.issn.1000-1158.2015.03.14
2013-05-22;
:2014-08-24
国家自然科学基金(51105323);河北省自然科学基金(E2015203356、E2012203166)
孟宗(1977-),男,河北保定人,燕山大学教授,博士,主要研究方向为信号分析与处理、旋转机械故障诊断。mzysu@ysu.edu.cn