多点定位场面监视雷达信号处理方法研究
2015-08-10颜波涛
颜波涛,周 喃
(中国电子科技集团公司第38研究所,合肥230088)
0 引 言
多点定位机场场监雷达通过接收民航飞机应答脉冲信号探测目标的空间位置,提供机场地面及附近空域中各目标的位置,实现机场区对飞机的精确定位和识别,改善繁忙机场的场面监视能力,提高机场的安全性[1]。信号处理是整个雷达系统的核心——如何正确捕捉应答信号脉冲串,解决到达时间(TOA)高精度的测时,并进行目标定位解算是实现多点定位的关键。
1 多点定位场监雷达定位原理
多点定位机场场监雷达是通过布置在机场附近的各传感器(远端单元)捕获飞机(车辆)的应答信号,各远端站利用捕获到的飞机应答脉冲信号进行脉冲串检测、应答信号解码,测量出各站接收到应答信号的到达时间,并将检测到的应答信号到达时间和应答码送至中心站匹配,利用多站TOA解算出目标的具体位置[2-3],定位技术原理图见图1。
2 信号处理设计实现
多点定位机场场监雷达信号处理分系统分为信号处理A(远端站)与信号处理B(中心站)2个部分实现。

图1 多站TOA时差定位技术原理图
2.1 远端站信号处理实现方法
远端站需要完成应答信号脉冲检测、框架检测、去混叠处理、解码,脉冲TOA测量、目标数据包处理等功能[4]。
远端站的功能框图如图2所示。

图2 远端站信号处理系统功能框图
2.1.1 脉冲检测模块设计
应答码是一串脉冲信号,信号处理的首要环节就是把接收到的应答信号形成满足脉冲特性的脉冲信号。各个站点分布处于不同地点,接收机也是独立的,信号强弱不等,为保证前后沿统一,需要分析脉冲前后沿特性。图3中横向为时间,单位0.05 μs;纵向为线性幅度,归一化值为1。

图3 脉冲信号与经过低通系统后的波形对比
由图3可见,前、后沿在采集脉冲信号均值的0.5的位置。对于对数信号,前后沿位置为比脉冲幅度小6dB的位置。选取适当的固定门限加噪声门限,大于门限认为1,否则为0。脉冲检测时采用滑窗检测法,满足N/M准则,则认为是脉冲信号。若脉冲过宽,则认为是干扰信号(如雷达脉冲信号或电台信号的谐波),予以剔除。
2.1.2 框架检测与解码
当飞机上的应答机收到二次雷达地面站的询问信号后,就根据询问模式自动回答一串脉冲,这串脉冲称为应答码。应答码由16个信息码位组成,这些码位的代号依次是 F1、C1、A1、C2、A2、C4、A4、X、B1、D1、B2、D2、B4、D4、F2和SPI,每个码位都有2种状态,即:有脉冲或无脉冲,有脉冲时为“1”,无脉冲时为“0”。F1与F2的0.5电平处的脉冲前沿间隔为20.3±0.1μs,称为框架脉冲,它们是二次雷达应答信号的标志脉冲,均恒为“1”状态。X位是备用状态,恒为“0”。2个框架脉冲(F1与F2)之间的12个信息码位C1、A1、C2、A2、C4、A4、X、B1、D1、B2、D2、B4、D4为信息码,可以编成4 096个独立的应答码。
正常情况下,2个框架脉冲的间隔为20.3±0.1μs,因此,一个框架就认为2个前沿间有404~408个时钟周期(20MHz抽样频率)。在本系统中,框架脉冲的检测是根据比较延时的前沿与非延时情况下的重合情况,延时的前沿对应于框架脉冲F1,非延时的前沿对应脉冲F2,F1相对于F2延时20.3μs,由于F2相对于F1有5个时钟脉冲的变化范围,F2与F1的前沿延时404~408个时钟周期的任一个对齐,都认为是一个正确的框架。

图4 应答信号组成

图5 20MHz采样真实应答信号
当一个正确的框架被检测到,接下来的任务就是检测此次应答码的内容,解码过程依据每个应答码间的距离都是1.45μs,比较相对于框架脉冲可能出现应答码的位置上的幅度值与框架脉冲幅度之间的差值,若超出一定的幅度范围则应答码为0,否则为1。考虑到每个应答码与框架脉冲间的距离有一定的容许误差,在距框架脉冲相应的应答码出现的位置上,提前或延后一个时钟周期都认为是正确的应答码的位置。
2.1.3 应答码混叠处理
在机场场面监视中,由于可能有多架飞机且相距较近,其应答信号几乎同时响应而使系统的接收信号发生混叠。对于混叠,考虑2种情况:一种为码元不混叠,只是码元(脉冲)交替出现,即码元时间间隔不是1.45μs,这个可以通过判别码元时间间隔即可知道;另一种为码元脉冲混叠,即脉冲宽度比0.45μs要大。因此,通过脉冲前后沿的时间差来识别码元脉冲是否交叠[5-6]。
当发现收到的一脉冲串存在混叠现象时,其解码就不能按照不混叠的情况处理,否则可能有误。
首先,判断框架脉冲第1个脉冲是否有交叠。
若没有(即时间间隔0.6μs以上,等效距离间隔180m以上),则对其以后的脉冲处理,按照前沿(th+0.1+1.45*n)μs采样,后沿(tb-0.1+1.45*n)μs采样,n=1,…,14。若二者一致,则该码元信息提取无误。不同时,优选信息状态为“0”,因为2个应答信号的脉冲(“1”状态)接收后相当于“或”逻辑。为脉冲且脉宽为0.45μs时,则质心估计时刻可用。0.1μs的偏差主要是防止前后沿的检测偏差,因此,两目标的定位分辨时间间隔大于0.2 μs,即120m。
若交叠,则说明两目标相距很近,可以分别以前后沿处理2批目标信息码。为避免框架脉冲检测时因第1个脉冲存在交叠,造成框架丢失或编码判断不准确,可以在单次脉冲检测时即对脉冲宽度进行判断,如若脉冲宽度大于0.45μs,则该脉冲可能存在混叠。对于混叠的脉冲,可以利用脉冲宽度及其前后沿特性对脉冲进行切分,将1个混叠脉冲分离为2个独立脉冲(如图6)。脉冲A前沿即以混叠脉冲前沿为前沿,后沿为混叠脉冲前沿(th+0.45μs)。脉冲B前沿以混叠脉冲后沿(tb-0.45μs)为前沿,后沿即为混叠脉冲后沿。

图6 混叠脉冲切分示意图
用以上方法处理2个目标应答码混叠时,信息码解码一般不会出现问题。为了防止信息码解码时的误码,要求后端空间定位时间匹配时,对信息码不要求所有位匹配,否则多目标混叠导致解码错误,将出现无解或空间定位错误。这一点要从工程实际允许应答信号混叠严重程度去要求,在目标定位漏警和虚警中寻求平衡。
处理中,为了方便中心站应答信号匹配处理,混/不混叠应答信号等建立不同标记,以示不同的TOA信用标志。
2.1.4 高精度脉冲TOA测量
精确测量应答信号的到达时间以满足多点定位的需要是机场场面高精度综合监视系统的技术难点之一。本系统设计出了适应系统工程化的自适应门限检测方法、差值测时法、多点数据综合测时法的优化解决方案,解决了多点定位系统到达时间测量对脉冲幅度的偶合作用,使测时精度更好地满足系统对目标精确定位的要求[7]。
(1)自适应门限检测法
为了解决各远端基站因接收到脉冲幅度不同,而引起固定门限带来的脉冲到达时间测量误差,考虑采用自适应门限的方法提高测时精度,即采用脉冲幅度的固定比例为门限,确定脉冲到达时间。由图7可以看出,即使脉冲幅度不同,脉冲幅度的固定比例时间仍在同一时间点t上,脉冲到达时间测量不受脉冲幅度的影响。

图7 输入正交信号的自适应门限检测示意图
以上方法适用于输入IQ信号时的门限检测。由于本系统输入信号为求模取对数后的幅度信号,脉冲幅度的固定比例为门限的检测方法即转化为脉冲幅度降固定数值为门限,如图8所示。

图8 输入模对数值的自适应门限检测示意图
(2)差值法到达时间测量
由以往脉冲到达时间测量分析可知,采用逐次临近法选取与幅度均值接近的幅度时间偏差来获得脉冲到达时间偏差,所得到达时间测量精度为10ns,且会引起2.89ns的量化误差。为了避免量化误差对本系统定位精度上的影响,满足到达时间测量精度为1ns的系统精度要求,可采用差值测时法计算脉冲偏差时间。
脉冲上升沿差值测时方法可以近似于梯形进行运算。如图9所示,假设过门限脉冲顶端幅度均值减去固定差值所获得的脉冲前沿时刻幅度为S-,脉冲前沿时刻t落于采样点时刻t1、t2之间,A1、A2为t1、t2时刻的100M 采样幅度值,A1<S-<A2,则:

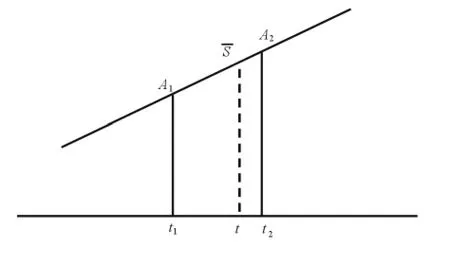
图9 差值法到达时间测量示意图
由式(1)可得脉冲前沿时刻t:

采用差值测时的方法,解决了逐次临近法带来的量化误差,进一步提高了单站到达时间测时精度(1ns)。
另外还有多点数据综合测时法,由于篇幅所限,本文就不一一介绍。
2.2 中心站信号处理实现方法
中心站主要实现各远端站点的编码匹配处理、多点定位处理等功能。
中心站的功能框图如图10所示。
远端站通过各通道将实时应答信号解码信息及时间信息TOA送入中心站数字信号处理器(DSP)进行编码匹配处理,匹配后获得来自同一个目标的应答信号及TOA等信息组合送目标解算计算机,解算目标位置。
2.2.1 多站匹配软件实现
中心站多站匹配软件在一片DSP中实现,软件采用结构化设计方法,总体结构设计由解应答数据包、多站目标信息匹配、生成目标数据包软件单元组合组成。其中,多站目标信息匹配软件单元组合由匹配链表操作、目标信息匹配、提取匹配目标信息3个软件单元组成。软件单元组成如图11所示。
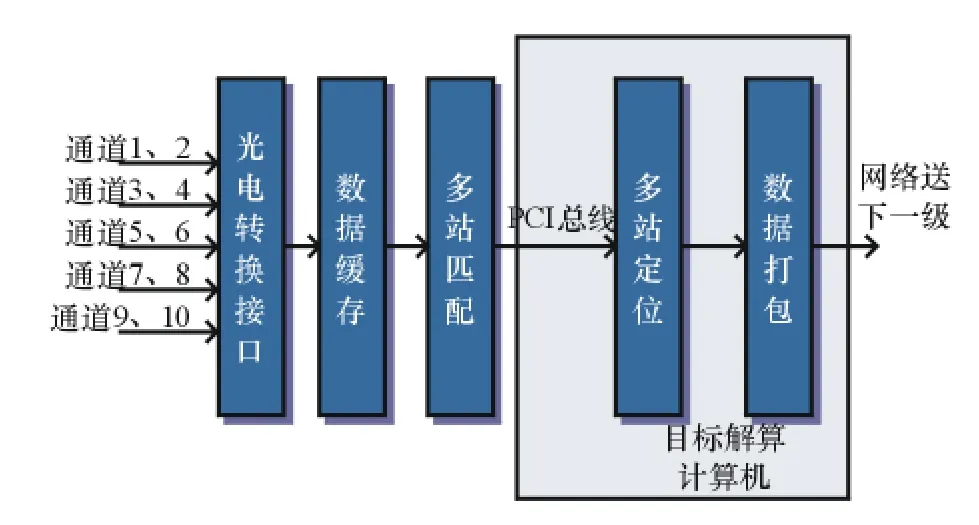
图10 中心站信号处理系统原理框图
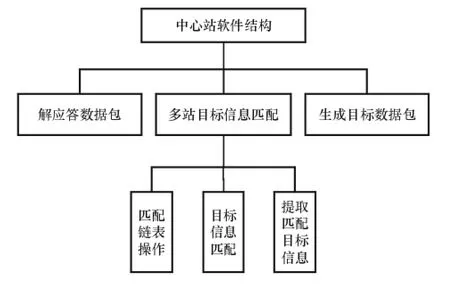
图11 中心站软件单元组成框图
2.2.2 多点定位算法
当中心站获取了各站到达时间,则只要通过空间三维方程求解即可,因此只要满足4个站点即可定位目标的三维空间位置(x,y,z),则:

由于实际不能获得当前应答信号从目标到各站的TOA传播时间,只是获得脉冲到达的时刻,因此由时间差信息可组成3个方程的方程组[8]:
在目标计算机中,只要解算该方程组,即可获得目标空间位置。这就是多点定位的基本思想,也是多点定位场监雷达监视系统的关键内容。
3 测试结果
本系统可通过车载应答模拟器模拟飞机发出真实的应答信号,对整个信号处理结果进行测试。在实验场中搭建5个远端站(接收站),如图12所示,利用GPS测得各远端站点具体坐标位置。定位测试时,按一定轨迹推动车载应答器,其发出的应答信号经过信号处理后在终端画面上形成图中运动目标的圆形轨迹,经数据分析该系统定位误差小于2m。

图12 车载应答模拟器运行轨迹
[1]张睿,孔金凤.机场场面监视技术的比较及发展[J].中国西部科技,2010(4):34-35.
[2]陆炫.浅析基于广域多点相关定位的监视新技术[J].北京:空中交通管理,2008(1):19-20.
[3]周喃,颜波涛,赵洪立.基于多点定位的高精度TOA测量方法研究[J].电子工程学院学报,2014(3):37-39.
[4]孙仲康,周宇,何黎星.单多基地有源无源定位技术[M].北京:国防工业出版社,1996.
[5]曲长文,徐征.一种新的基于角度和时差的稳健定位跟踪算法[J].信号处理,2011(2):27-31.
[6]王宇,王志雄.无源多站时差定位技术研究及在频谱监测中的应用[J].山西电子技术,2011(1):62-63.
[7]王成,李少洪.测时差定位系统精度分析与最优布局[J].火控雷达技术,2003,32(1):32-34.
[8]顾晓婕,王新民,李文超.多站时差无源定位探测器位置优化[J].传感技术学报,2011(1):93-99.