Dynamic Coverage with Wireless Sensor and Actor Networks in Underwater Environment
2015-08-09XiaoyuanLuoLiuFengJingYanandXinpingGuan
Xiaoyuan Luo,Liu Feng,Jing Yan,and Xinping Guan
Dynamic Coverage with Wireless Sensor and Actor Networks in Underwater Environment
Xiaoyuan Luo,Liu Feng,Jing Yan,and Xinping Guan
—This paper studies the problem of dynamic coverage with wireless sensor and actor networks(WSANs)in underwater environment.Different from most existing works,the WSANs consist of two kinds of nodes,i.e.,sensor nodes(SNs)which cannot move autonomously and actor nodes(ANs)which can move autonomously according to the performance requirement. The problem of how to coordinate two kinds of nodes to facilitate dynamic coverage in underwater environment is challenging due to their heterogeneous capabilities.To reduce redundancy of communication links and improve connectivity between ANs and SNs in underwater WSANs,a min-weighted rigid graph based topology optimization scheme is fi rst developed,such that the underwater communication energy consumption can be saved.With the optimized topology,a dynamic coverage strategy is proposed to improve the coverage among SNs and ANs for underwater WSAN where underwater fl uid motions are considered.Furthermore,it is proved that the network coverage area is connected by using the min-weighted rigid graph.Finally, simulation results are presented to show the effectiveness of the main results.
Index Terms—Underwater,coverage,wireless sensor and actor networks(WSANs).
I.INTRODUCTION
DYNAMIC coverage in underwater environment is one of the enabling technologies for the development of future ocean-observation systems.In a spatially-large underwater environment,there exist a number of points of interest which cannot be fully covered by any static con fi guration of the sensors(possibly due to the small sensing range as compared to the dimension of the environment).The goal is then to plan the motion of the mobile nodes,i.e.,dynamic coverage, in order to minimize uncertainty and maintain an up-todate knowledge of the state of the points of interest in the environment.Applications of underwater dynamic coverage range from oil industry to aquaculture,and include instrument monitoring,pollution controlling,climate recording,naturaldisturbances predicting,missions search and survey,and marine life studying reference[1-3].
Due to the sparse property in the underwater environment, most of the underwater dynamic coverage strategies adopt mobile sensor nodes to achieve the coverage task,which has been widely researched.Reference[4]proposed a highspeed AUV-based silent localization algorithm for underwater sensor networks.In order to stabilize the dynamic coverage,a dynamic coverage strategy was presented to adapt the velocity of mobile nodes along a prede fi ned trajectory in[5-6].In addition,Huang et al.[7]designed a novel direction-steerable three-dimensional directional sensor model,and detailedly analyzed the sensory ability of three-dimensional directional sensor based on probability model.Based on this,Xia et al.[8]developed a rigidity driven moving strategy for mobile sensors.In these papers given above,a large number of underwater mobile nodes were required to monitor the underwater environment.However,these underwater mobile nodes are very expensive due to the more complex underwater transceivers and to the hardware protection needed in the extreme underwater environment.Therefore,how to achieve the dynamic coverage with a small number of mobile nodes becomes a new issue.On the other hand,the power needed for underwater communications is higher than in terrestrial radio communications due to longer distances and more complex signal processing at the receivers to compensate for the impairments of the channel[9].Based on this,how to save the underwater communication energy becomes a new issue.Normally,the so-called neighbor rule is widely used to illustrate the topology relationship of sensor nodes(SNs). Analyzing the network topology with neighbor rule reveals that many interactions between sensors are redundant.The redundancy sometimes makes the communication complex and inef fi cient.References[10-11]introduced rigid graph based topology optimization to reduce the communication energy for wireless sensor network.However,it is still unknown whether it would reduce or not and how the rigid graph based optimization can improve the dynamic coverage performance in the underwater environment.In addition,in most existing sensor and actor networks,the authors mainly designed strategies to enhance the coverage performance while ignoring connectivity.For example,a distributed actor deployment algorithm is designed in[12],in which the approach applied repelling forces between neighboring actors and from the sensors that sat on the boundaries in order to spread them in the region. In addition,Zamanifar et al.[13]put forward a distributed, proactive algorithm to restore actor-to-actor connectivity of wireless sensor and actor networks(WSANs)that minimizedtime of reconnecting the network and also total required movements of actors.But it cannot be applied to the underwater environment.Reference[14]proposed deployment strategies for two-dimensional and three-dimensional communication architectures for underwater acoustic sensor networks.However, the underwater environment has a spare property.Thus,the performance improvement of coverage is also at the expense of connectivity reduction.Therefore,it is required to design a strategy where the performance of coverage and connectivity can both be guaranteed.
Motivated by above consideration,we design a dynamic coverage with WSANs in underwater environment,where both connectivity and coverage are considered.WSANs are composed of a large number of SNs and multiple mobile actor nodes(ANs).The roles of SNs and ANs are to collect data from the environment and perform corresponding actions based on the collected data,respectively.Compared with traditional static wireless sensor networks,WSANs not only have the capacity of monitoring the environment,but also can make decisions based on the observations and perform corresponding actions.On the other hand,only a small number of mobile ANs are used in WSANs,and then it is more economical compared with mobile sensor networks.A minweighted rigid graph based topology optimization scheme is fi rst provided to reduce the redundancy of communication links in underwater environment,and then a dynamic coverage strategy is proposed for underwater WSAN to achieve the dynamic coverage task.The main contributions of this paper are twofold.
1)To optimize the topology of underwater WSANs,a min-weighted rigid graph is used,such that the number of communication links and energy dissipations can be reduced.
2)Under the optimized topology and fl uid motions,a dynamic coverage strategy is proposed for SNs and ANs in underwater environment,such that the coverage rate can be improved.
The organization of the paper is given as follows.In Section II,problem formulation for underwater WSANs is described.Main results are presented in Section III.Section IV presents simulation to validate the proposed approach.Finally, conclusion and future work are presented in Section V.
II.PROBLEM FORMULATION
In this paper,the topology relationship of underwater WSANs is represented by an undirected graphG=(V,E,A), whereV=S∪RandE⊆V×V.In addition,the SNs and ANs are denoted byS={s1,s2,...,sc}andR={sc+1,sc+2,...,sn},respectively.The roles of SNs and ANs are to collect data from the environment and perform corresponding actions to the collected data,respectively.A graph is de fi ned to be undirected if edge(i,j)∈Eand edge(j,i)∈E.Adjacency matrixA=[aij]((i,j)∈E,aii=ajj=0,aij=aji)stands for the corresponding relations between the vertices and edges in the undirected graph.Next,some basic concepts in graph theory are introduced.
A graph is de fi ned to be rigid if the corresponding set of distance constraints is suf fi cient to maintain the formation shape,i.e.,a graph is rigid provided that all prescribed distance constraints between nodes are satis fi ed during a continuous rotation.Otherwise,it is called fl exible.A minimally rigid graph is a rigid graph where no edge can be removed without losing rigidity.
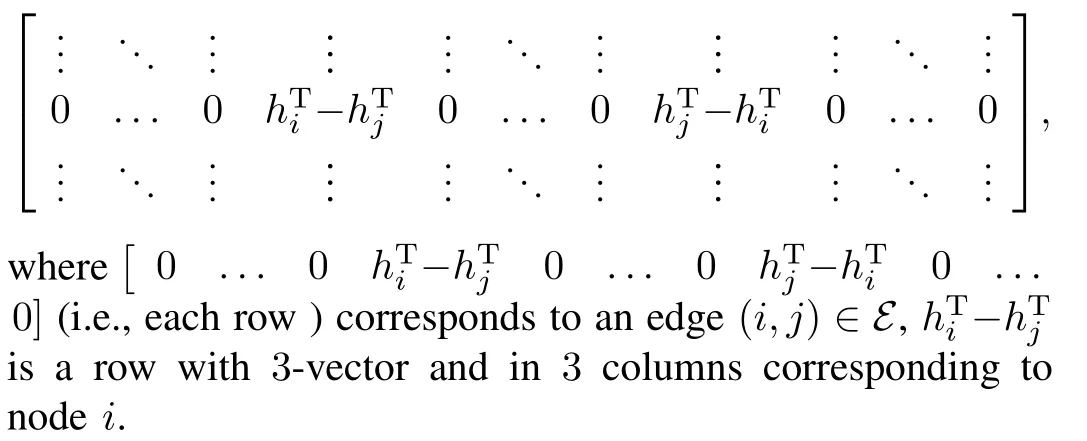
Given a network frameworkG=(V,E,A)withnvertices, positionshi∈R3andi∈V,if∀(i,j)∈Esatis fi es‖hi-hj‖=Υ>0,and(hi-hj)T(˙hi-˙hj)=0 at the initial rotation time(t≥0),we say that˙h=(˙h1,˙h2,...,˙hn)is an in fi nitesimal fl ex.An in fi nitesimal fl ex is trivial if it results from a rigid motion of the framework.A framework is said to be in fi nitesimally rigid if it only has trivial in fi nitesimal fl ex. The in fi nitesimal rigidity of a framework is a sticker condition than rigidity,where all in fi nitesimally rigid networks are rigid. Specially,the rigidity matrixMis de fi ned as an|E|×3|V|matrix
The following propositions are used in the design of underwater optimization topology.
Proposition 1[11,15-16].Mis a rigidity matrix of a general structure withnvertices(n>3)in three-dimensional environment.Then,this structure is in fi nitesimal rigid if and only if rank(M)=3n-6.
Proposition 2[11,15-16].An in fi nitesimal rigid belongs to rigid.
Remark 1.With Propositions 1 and 2,it can be easily obtained that:if an undirected graph in three-dimensional is an in fi nitesimal rigid and the number of edges it contains is 3n-6,then the undirected graph is minimally rigid graph.
After constructing the network topology of underwater WSANs,we investigate the coverage problem in underwater environment.Generally,network coverage problems can be categorized into static and dynamic ones.This paper mainly investigates the dynamic coverage problem by considering the complex dynamic environment of water,where nodes (including sensor and actor nodes)can move passively with fl uid motions.As we know,the water is a strati fi ed,rotating fl uid.For simplicity,similar to[17],it is assumed that the nodes move passively on horizontal surfaces,while neglecting the vertical movement.Next,we consider the condition of ordinary water circulation.
According to the continuous equation of fl uid motion+▽·(ρV′)=0,whereis micelle fl uid density andρ>0 is a constant,we can obtain the continuous motion equation of incompressible fl ow fi eld:▽·V′=0.The incompressible fl ow fi eld is a uniform fl ow,which is de fi ned as a uniform fl ow when the velocity and other hydrodynamic parameters do not change from point to point in the fl ow fi eld.In this paper,it is assumed that the given underwater area is an ideally incompressible fl uid.Based on this,the fl ow of water can bedescribed by a Lagrange stream functionφ,and the stream functionφcontains two different directions of the velocity fi eldV′≡(u,v),whereinu=andv=denote the east and north velocity fi elds,respectively.Now,we introduce the stream functionφ.
When the trajectories of particles are in a steady fl ow,the stream functionφcan be used to plot streamlines.Streamlines are perpendicular to equipotential lines.Then the continuity equations in Cartesian coordinates are given by=0.In order to describe the underwater environment,the following stream function model[18]is used for the basic meandering jet,i.e.,

whereφ0is the eastward and northward transport,xandyare positive Cartesian coordinates,λ,A,kandcare the width, the amplitude,the wave number and the phase speed of the sinusoidal meander,respectively.
III.MAIN RESULTS
In this section,we fi rst provide a min-weighted rigid graph to optimize the topology of underwater WSANs.With the optimized topology and fl uid motions,a dynamic coverage strategy is proposed for SNs and ANs in underwater environment.
A.Topology Optimization Based on Min-weighted Rigid Graph
The main process of generating the min-weighted rigid graph is divided into two steps:1)Generate the local minweighted rigid graph for each vertex;2)Delete the edges that do not belong to global min-weighted rigid graph.Detailed steps are given in Algorithm 1.
Algorithm 1.The minimum weighted dynamic cover deployment
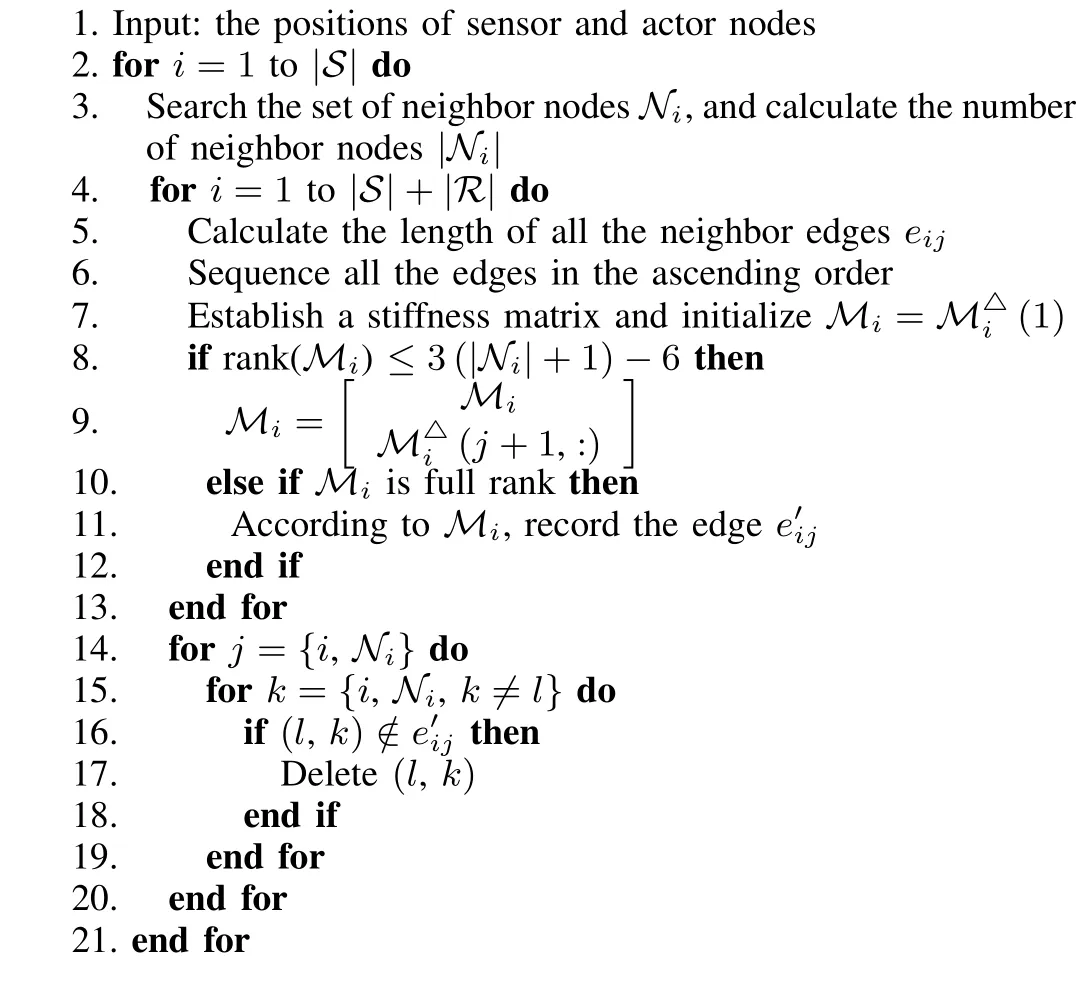
22.Output:the position of all sensor and actor nodes,meanwhile show the minimum weighted dynamic covering strategy graph
23.Call Algorithm 2.
In the following,we de fi ne the length of communication edge as the weighted value.Then,the weighted value in Fig.1(a),Fig.1(b)and Fig.1(c)are 10.942,9.824,and 9.528, respectively.Obviously,it can be obtained that the weighted value in Fig.1(c)is smallest,which means,the energy dissipation with the topology as shown in Fig.1(c)is the least. Based on this,the following theorem is given.
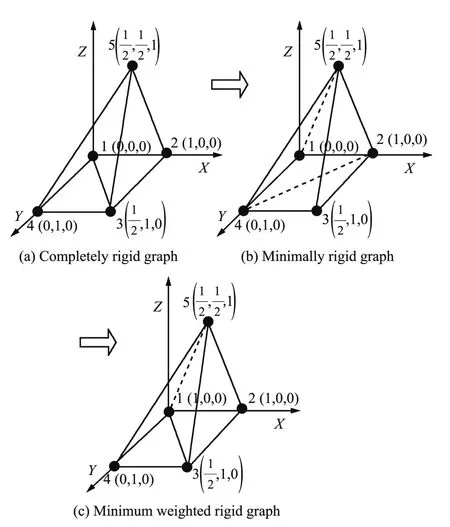
Fig.1.Topology relationship of underwater WSANs.
Theorem 1.In underwater environment,if we use the minweighted rigid graph generated by Algorithm 1 to represent the topology relationship of underwater WSAN,the network coverage area is connected.
Proof.In three-dimensional underwater WSANs,according to the rigid de fi nition of min-weighted rigid graph,it is obtained that min-weighted rigid is the minimum rigid network. Through the properties of the minimum rigid,it is known that each vertex can at least be connected with three neighbors and the total number of edges is 3n-6.Obviously,the above conditions meet the necessary and suf fi cient condition of 3 connected graph,i.e.,there are at least three roads between three different vertices in graph.So this network is 3 connected.Therefore,if remove three arbitrary vertices,the underwater WSANs are still connected.□
According to the above algorithm,the optimal topology generated by min-weighted rigid algorithm is unique.The time complexity is an important index used to measure this algorithm.Then we de fi ne the time complexity is O(n3). If O(n3)is greater,the higher the degree of complexity is,whereas the lower the degree of complexity is.
B.Dynamic Coverage and Algorithm
Based on the min-weighted rigid graph topology,a dynamic coverage strategy is proposed for SNs and ANs in underwater environment.Especially,fraction of coverage is an important measurement for the network quality of service(QOS).It is noticed that the coverage of underwater WSANs plays an important rule on the rationally allocating network space resources,since it achieves better environmental perception and information transmission,and improves the network viability. In order to evaluate the network performance,we give the following de fi nitions:
De fi nition 1(fraction of coverage).Assuming thatVis the volume of the underwater WSANs monitoring area andViis the volume of effective cover for arbitrary sensor(or actor)node.Then,the fraction of coverage is de fi ned asC=∪i∈VVi/V,whereVi=4πr3i/3 andriis the perception of the sensor(or actor)node radius.
De fi nition 2(node adjacency coverage).In the node adjacency setNi,node adjacency coverageK(si)is de fi ned as the ratio of the sum of all the nodes in the coverage of effective volume and the sum of all the nodes could cover the largest volume.Moreover,K(si)≤1 and

Among them,∪Vijis de fi ned as the effective cover volume of nodesiand all its adjacent nodes,and|Ni|denotes the number of adjacent nodes andris the node′s perception of the radius.Less volume of overlapsiand its adjacent nodes effectively cover,greater the value ofK(si)is.To obtainK(si),it is required to know∪Vijfi rstly.However,it is dif fi cult to calculate the overlap volume in three-dimensional space.We use a mathematical method to calculate the volume of a regional overlap,which is shown as Fig.2.
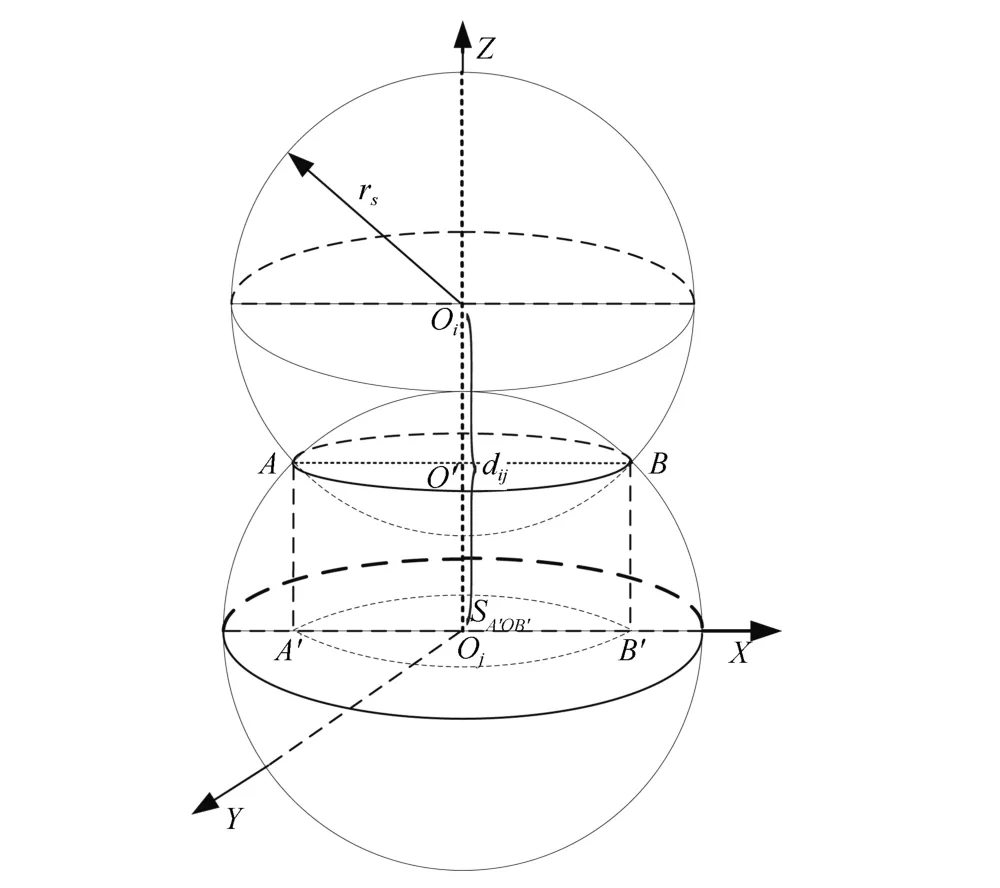
Fig.2.The model of the volume of overlap.
In Fig.2,we assume thatsjis a neighbor node ofsi.oi,ojare positions of the nodesiandsjrespectively.The distance between these two nodes is denoted bydij(0≤dij≤2rs).AandBare two intersecting points.SA′OB′is the projection of the overlap in planexojy.The volume of overlap can be calculated by the following equation:

In analogy to fi sh movement,the sensor and actor nodes are considered as food and fi sh,respectively.As fi sh,actors have two movements:feeding movement and clustering movement. In feeding movement,it is de fi ned that the static sensor with no neighbor nodes is to fi nd the food with the highest concentration and its task is only to collect data under the impact of the fl ow function.This behavior is a kind of random motion,because the actors need to move more widely for neighbors and food.
At some points,actors begin to forage in current positions. Within its largest range of perception,the concentrations of food are determinated.Furthermore,actors move to the food with the highest concentration.But if actors do not search for the food with the highest concentration,then repeat the actions above.After trying a few times,if actors still do not fi nd the highest concentration,then turn to the next action. In clustering movement,actors in the process of movement can move as far as possible to the center of the neighbor fi sh and avoid overcrowding.When actors can not fi nd any food,then start to look for companions.Just as the feeding movement,the actors that have larger range of perception to search partners has less neighbor nodes at the initial time. Then actors calculate the approximate center position of the partner.If the center position is not too crowded,actors are required to perform clustering movement.
Our goal is to fi nd an optimal deployment strategy that achieves higher coverage while having full connectivity of all sensor neighbor nodes with minimum transmission loss.See the details in Algorithm 2.
Algorithm 2.Dynamic coverage control
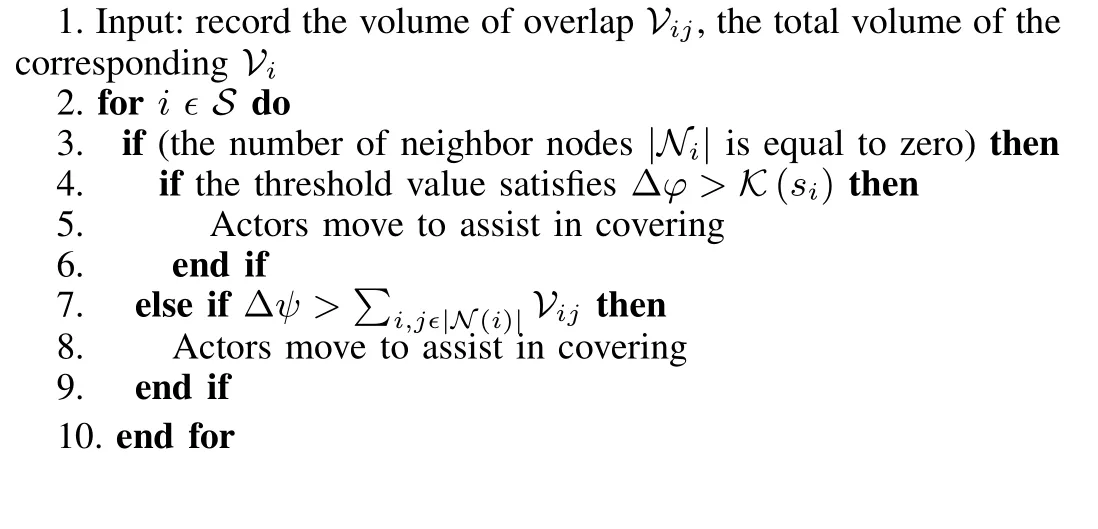
In Algorithm 2,ANs perform the dynamical assist in covering at random position and time.With the date collected by SNs,ANs start to perform feeding movement and clustering movement.When ANs within its maximum sensing range perceive a point which has no neighbor nodes around,ANs move toward it and begin to fi ne-tune the distance between them until the node adjacency coverage is less than the threshold set in advance.This behavior is feeding movement(line 1~6). On the other hand,when ANs within its maximum sensing range perceive a point which has at least one neighbor node, ANs prepare to perform clustering movement,particularly if the volume of overlap at that point is smaller than Δφ, which is de fi ned as a crowding factor to avoid overcrowding. Repeat operations above until all ANs have proper positions to collaborate SNs coverage.
Autonomous fi sh swarm algorithm(AFSA)is a novel optimization method proposed in[19].This algorithm is easy to understand and implement.It achieves optimization by multiple comparison and characteristics of mobile.Nevertheless, this algorithm has some shortcomings,such as,poor robustness,being easy to fall into local optimum,slow convergence speed and the limitations of application environments.So we improve the algorithm and apply it to a new environment. In this paper,we use the node adjacent coverage and the overlapping volume among adjacent nodes to restrict ANs random moving in feeding movement and clustering movement. Moreover,with these restriction,ANs cannot jump out of the local optimum,nor accelerate the convergence speed.
Remark 2.From the analysis above,the action of actors can be easily explained.Actors perform appropriate actions according to all the data collected by SNs.Then they guarantee the connectivity of WSANs.In addition,with a small number of mobile ANs used in WSANs,it is more economical compared with WMSNs.
Remark 3.In Algorithm 1,the global min-weighted rigid graph is generated indirectly from the local min-weighted rigid graph,where local min-weighted rigid graphs are generated and each node only exchanges information with its neighboring nodes.Meanwhile,in Algorithm 2,each node(AN or SN)makes decision using only the received data within its neighboring sensing area.Therefore,the proposed method in this paper is in a distributed way.
IV.SIMULATIONRESULTS
In this section,simulation results are given to demonstrate the ef fi ciency of the proposed dynamic coverage algorithm. The underwater WSANs are consist of 12 SNs and 5 ANs, where the initial node deployment is shown in Fig.3.We assume that the length,width and height of the area is 100meters,respectively.The parameters are set as follows:λ=1.5,A=2π/7.5,c=0.15 andrs=20.
Figs.4 and 5 show the topology relationship of SNs and ANs with the distributed neighbor rule and the min-weighted graph optimization strategy,respectively.A comparison of the number of links between un-optimized and optimized distributed modes is presented in Fig.6.Obviously,we can see the complexity of the communication topology is reduced by the min-weighted graph optimization strategy.Furthermore, Fig.7 compares the number of the difference value between links in un-optimized and optimized distributed modes.We can see that the number of the difference value between linksin optimized distributed modes is constant.But the number of the difference value between links in un-optimized distributed modes is almost linear to number of sensors.

Fig.3.The initial node deployment.

Fig.4.Ordinary rigid topology relationships in un-optimized distributed mode.
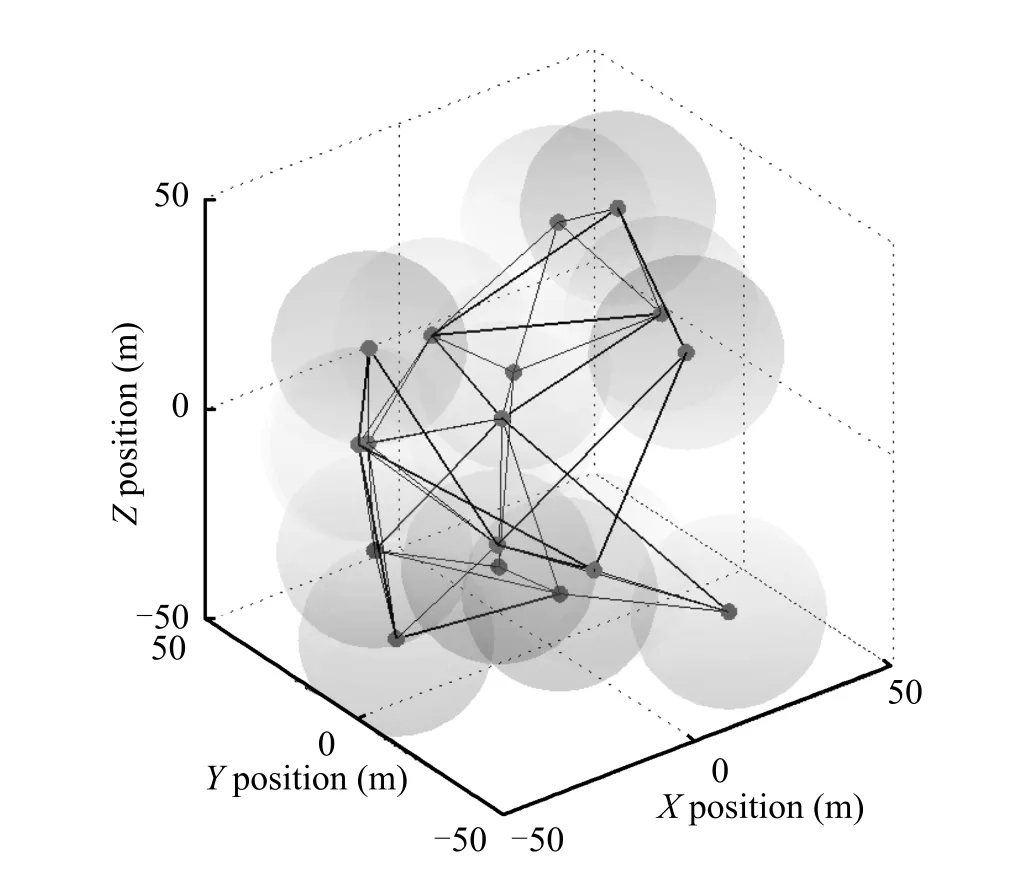
Fig.5.Minimum weighted rigid topology relationships in optimized distributed mode.

Fig.6.The number of links in un-optimized and optimized distributed modes.
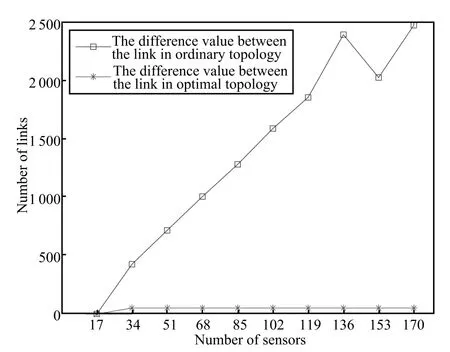
Fig.7.The number of the difference value between links in unoptimized and optimized distributed modes.
Fig.8 shows that the initial coverage of 12 SNs and 5 ANs. The little red rectangle represents AN,and the little black dots represent SN.From Fig.8,it is obvious that this network has poor coverage and connectivity,because some nodes are only of 2-connectivity.And in the underwater environment, 2-connectivity is not stable.If any link is disconnected,part of the network will be paralyzed.If the network connectivity cannot be guaranteed,the coverage of the network will not be achieved.To solve this problem,a min-weighted dynamic covering strategy is used to deploy the network.SNs can passively move with the underwater fl uid motions,and ANs can automatically explore new position to assist in the updated wireless sensor actor network.As shown in Fig.9,the network connectivity and coverage are both improved.Also,it can be seen that each node has at least three links to other nodes. To show the effectiveness of the algorithm,we perform the deployment of network with two different methods at certain pointt.Fig.10 shows the original deployment of nodes,and Fig.11 is the original rigid deployment using the method in [20].In addition,the min-weighted dynamic cover deployment and connected graph in this paper are shown in Fig.12 and Fig.13.Obviously,compared with the results in Fig.10 and Fig.11,both of the coverage and the connectivity of the network are improved using our method.
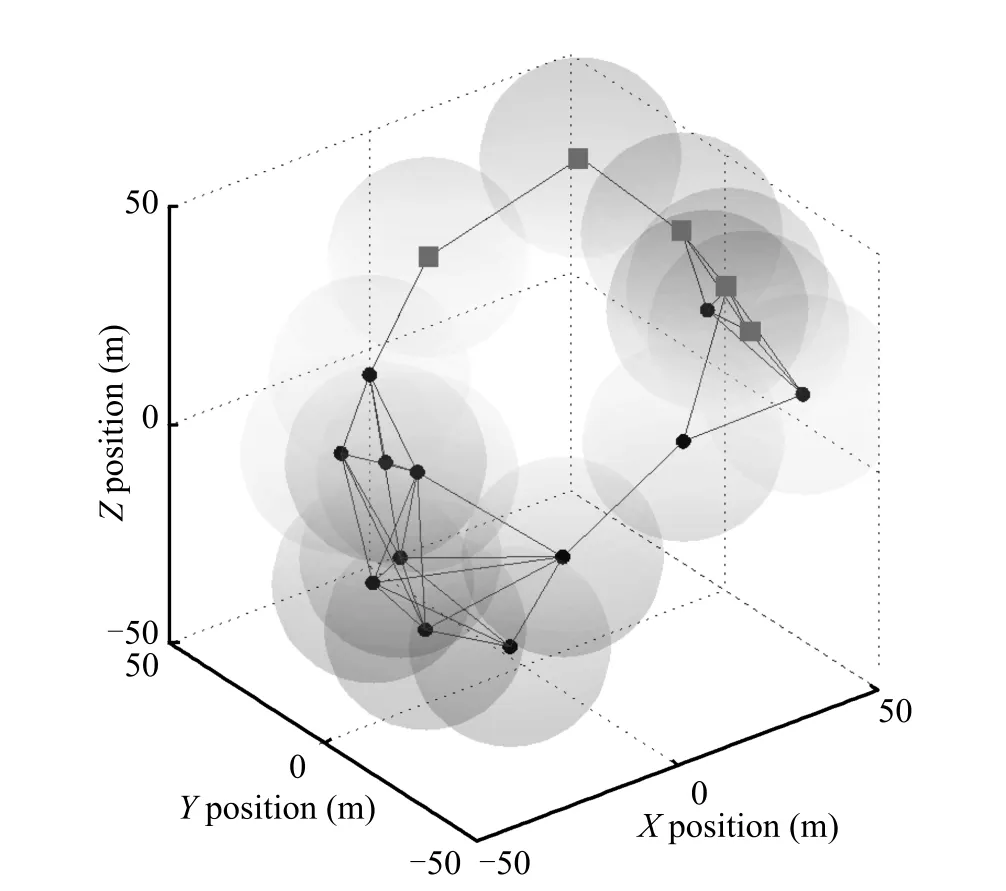
Fig.8.Ordinary rigid deployment use[20].
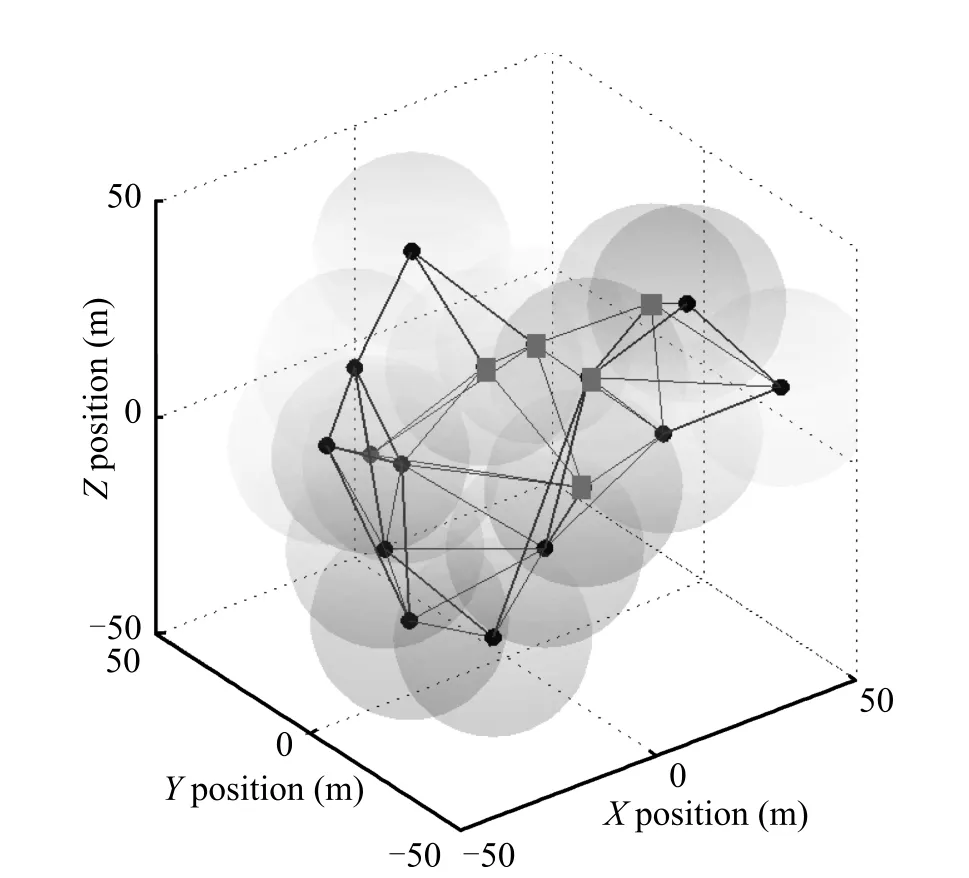
Fig.9.The minimum weighted dynamic cover deployment.

Fig.10.The original deployment of nodes at certain pointt.

Fig.11.The ordinary rigid deployment use[20]at certain pointt.
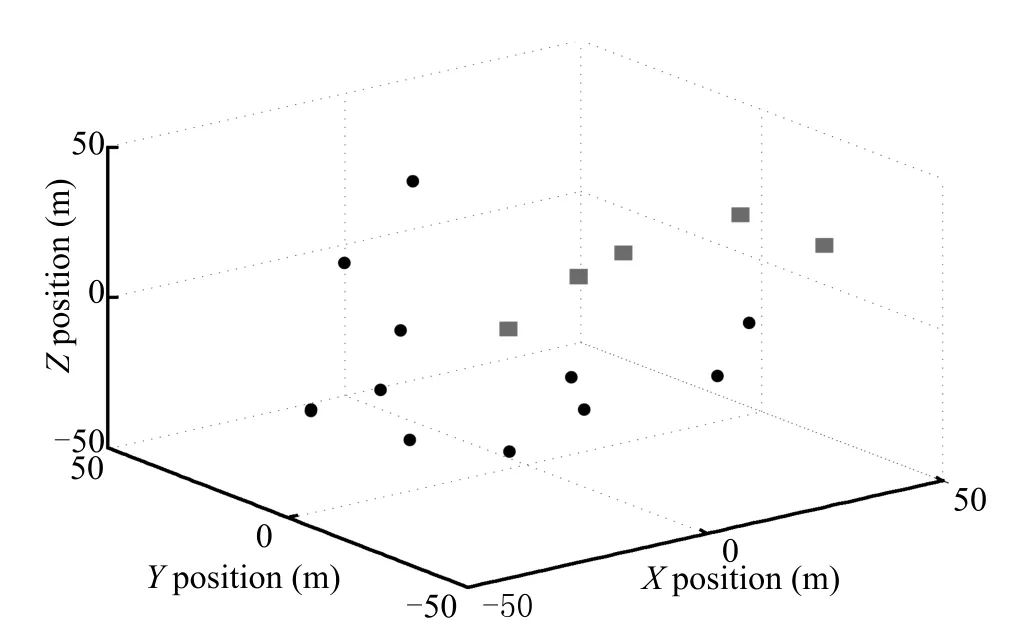
Fig.12.The min-weighted dynamic cover deployment at certain pointt.

Fig.13.The connected graph of min-weighted dynamic cover deployment at certain pointt.
V.CONCLUSION ANDFUTUREWORK
In this paper,we investigate the problem of dynamic coverage with wireless sensor and actor networks(WSANs)in underwater environment.SNs are responsible to collect data from the environment,and ANs perform appropriate actions according to the gathered data.For such a network,a topology optimization strategy based on min-weighted rigid graph is fi rst proposed to optimize the topology of WSANs.With the optimized topology,the amount of communication links and energy dissipations can be reduced.Furthermore,a dynamic coverage strategy is proposed for underwater WSAN.As shown in the simulation results,not only the connectivity is signi fi cantly enhanced but also the coverage rate can be increased accordingly.Moreover,it is known that the construction cost of the underwater WSAN can be reduced.
In our future work,the undirected graph will be switched to a directed graph.Also on the basis of the directed graph, we may achieve a full coverage of underwater area under the condition of obstacles.
REFERENCES
[1]Yan J,Guan X P,Luo X Y,Chen C L.A cooperative pursuit-evasion game in wireless sensor and actor networks.Journal of Parallel and Distributed Computing,2013,73(9):1267-1276
[2]Chao C M,Wang Y Z,Lu M W.Multiple-rendezvous multichannel MAC protocol design for underwater sensor networks.IEEE Transactions on Systems,Man,and Cybernetics:Systems,2013,43(1):128-138
[3]Pandey P,Hajimirsadeghi M,Pompili D.Region of feasibility of interference alignment in underwater sensor networks.IEEE Journal of Oceanic Engineering,2014,39(1):189-202
[4]Wu L H,Li Y P,Su S J,Yan P,Qin Y.Hydrodynamic analysis of AUV underwater docking with a cone-shaped dock under ocean currents.Ocean Engineering,2014,85:110-126
[5]Smith S L,Schwager M,Rus D.Persistent robotic tasks:monitoring and sweeping in changing environments.IEEETransactionsonRobotics, 2012,28(2):410-426
[6]Smith R N,Schwager M,Smith S L,Jones B H,Rus D,Sukhatme G S. Persistent ocean monitoring with underwater gliders:adapting sampling resolution.Journal of Field Robotics,2011,28(5):714-741
[7]Huang J J,Sun L J,Wang R C,Huang H P.Improved virtual potential fi eld algorithm based on probability model in three-dimensional directional sensor networks.International Journal of Distributed Sensor Networks,2012,Article ID 942080
[8]Xia Na,Zheng Yu-Chen,Du Hua-Zheng,Xu Chao-Nong,Zheng Rong. Rigidity driven underwater sensor self-organized deployment.Chinese Journal of Computers,2013,36(3):494-505(in Chinese)
[9]Lee T S,Lee B H.A new hybrid terrain coverage method for underwater robotic exploration.Journal of Marine Science and Technology,2014, 19(1):75-89
[10]Luo X Y,Yan Y L,Li S B,Guan X P.Topology control based on optimally rigid graph in wireless sensor networks.Computer Networks, 2013,57(4):1037-1047
[11]Yan J,Chen C L,Luo X Y,Liang H,Guan X P,Yang X.Topology optimization-based distributed estimation in relay assisted wireless sensor networks.IET Control Theory and Applications,2014,8(18):2219-2229
[12]Akkaya K,Janapala S.Maximizing connected coverage via controlled actor relocation in wireless sensor and actor networks.Computer Networks,2008,52(14):2779-2796
[13]Zamanifar A,Shari fiM,Kashe fiO.Self actor-actor connectivity restoration in wireless sensor and actor networks.In:Proceedings of the 1st Asian Conference on Intelligent Information and Database Systems. Quang binh,Vietnami:IEEE,2009.442-447
[14]Pompili D,Melodia T,Akyildiz I F.Three-dimensional and twodimensional deployment analysis for underwater acoustic sensor networks.Ad Hoc Networks,2009,7(4):778-790
[15]Anderson B D O,Yu C B,Fidan B,Hendrickx J M.Rigid graph control architectures for autonomous formations.IEEE Control Systems Magazine,2008,28(6):48-63
[16]Eren T,Anderson B D O,Morse A S.Operations on rigid formations of autonomous agents.Communications in Information and Systems,2004, 3(4):223-258
[17]Wang Q,Chen J,Fang H,Ma Q.Flocking control for multi-agent systems with stream-based obstacle avoidance.Transactions of the Institute of Measurement and Control,2014,36(3):391-398
[18]Arakawa A.Computational design for long-term numerical integration of the equations of fl uid motion:two-dimensional incompressible fl ow. Part I.Journal of Computational Physics,1966,1(1):119-143
[19]Li Xiao-Lei,Shao Zhi-Jiang,Qian Ji-Xin.An optimizing method based on autonomous animats: fi sh-swarm algorithm.System Engineering Theory and Practice,2002,22(11):32-38(in Chinese)
[20]Zhu Z S,So A M-C,Ye Y Y.Universal rigidity:towards accurate and ef fi cient localization of wireless networks.In:Proceedings of the 2010 IEEE INFOCOM.San Diego,CA:IEEE,2010.1-9


Liu Feng received the bachelor degree in automation from Yanshan University,China,in 2013.She is currently a master student in control theory and control engineering at Yanshan University.Her research interests include coverage control and cooperative control for multi-agent systems.

Jing Yan received the bachelor degree in automation from Henan University,China,in 2008,and the Ph.D.degree in control theory and control engineering from Yanshan University,China,in 2014.From June 2014 to December 2014,he was a research assistant at the Key Laboratory of System Control and Information Processing,Ministry of Education of China.Currently,he is a lecturer at Yanshan University China.His research interests include cyber-physical systems,multi-agent systems,and networked teleoperation systems.He has authored over 20 referred international journal and conference papers.He is the inventor of 2 patents.He was awarded the Competitive National Graduate Scholarship from Ministry of Education of China in 2012.He received the Excellence Paper Award from the National Doctoral Academic Forum of System Control and Information Processing in 2012.In 2013,he received the Science and Technology Innovation Award from Yanshan University.

Xinping Guan received the Ph.D.degree in control theory and control engineering from Harbin Institute of Technology,China,in 1999.Since 1986,he has been at Yanshan University,China.In 2007,he joined Shanghai Jiao Tong University,China,and he is currently a professor.His research interests include wireless networks and applications,cooperative control of multi-agent systems,and networked control systems.
Luo
the Ph.D.degree from the Department of Electrical Engineering,Yanshan University,China,in 2005.He is currently a professor at Yanshan University.His research interests include multi-agent systems and networked control systems. Corresponding author of this paper.
Manuscript received October 9,2014;accepted March 31,2015.This work was supported in part by National Basic Research Program of China(973 Program)(2010CB731803),National Natural Science Foundation of China(61375105),China Postdoctoral Science Foundation Funded Project(2015M570235),Youth Foundation of Hebei Educational Committee(QN2015187),and Science Foundation of Yanshan University(B832, 14LGA010).Recommended by Associate Editor Youxian Sun.
:Xiaoyuan Luo,Liu Feng,Jing Yan,Xinping Guan.Dynamic coverage with wireless sensor and actor networks in underwater environment.IEEE/CAA Journal of Automatica Sinica,2015,2(3):274-281
Xiaoyuan Luo,Liu Feng,and Jing Yan are with the Institute of Electrical Engineering,Yanshan University,Qinhuangdao 066004,China(e-mail: xyluo@ysu.edu.cn;Fengldw1314@163.com;jyan@ysu.edu.cn).
Xinping Guan is with the Department of Automation,Shanghai Jiao Tong University,and Key Laboratory of System Control and Information Processing,Ministry of Education of China,Shanghai 200240,China(e-mail: xpguan@sjtu.edu.cn).
杂志排行
IEEE/CAA Journal of Automatica Sinica的其它文章
- Cyber-physical-social System in Intelligent Transportation
- Decentralized Event-Triggered Average Consensus for Multi-Agent Systems in CPSs with Communication Constraints
- Cyber-physical Modeling and Control of Crowd of Pedestrians:A Review and New Framework
- An Approach of Distributed Joint Optimization for Cluster-based Wireless Sensor Networks
- Robust Dataset Classi fi cation Approach Based on Neighbor Searching and Kernel Fuzzy C-Means
- Guest Editorial for Special Issue on Cyber-Physical Systems