STK simulation design for satellite formation tracking m ission w ith bidirectional communication
2015-07-25ChenYangyangZhangGuoxiFengYuanWeiPing
Chen YangyangZhang GuoxiFeng YuanWei Ping
(1School of Automation,Southeast University,Nanjing 210096,China)
(2Key Laboratory of Measurement and Control of Complex Systems of Engineering,M inistry of Education,Southeast University,Nanjing 210096,China)
(3Department of Electronic Information Engineering,Anhui Business College,Wuhu 241002,China)
STK simulation design for satellite formation tracking m ission w ith bidirectional communication
Chen Yangyang1,2Zhang Guoxi1Feng Yuan1Wei Ping3
(1School of Automation,Southeast University,Nanjing 210096,China)
(2Key Laboratory of Measurement and Control of Complex Systems of Engineering,M inistry of Education,Southeast University,Nanjing 210096,China)
(3Department of Electronic Information Engineering,Anhui Business College,Wuhu 241002,China)
The problem of satellite formation tracking control is studied by using the tool,the satellite tool kit(STK)software.To fight against gravitational perturbation rejection,a sliding mode controller for each satellite is proposed to accomplish the orbit trace and is then verified by the STK.For the purpose of accomplishing the formation tracking mission w ith bidirectional communication in STK,a time-share orderly calling plug-in is designed by C++,which gives solutions to the problems of themonopolization of computing resource and no return of the satellite identifier in the calculation center.The effectiveness of the decoupling approach is tested and verified by the STK.The simulation results obtained by the STK aremoremeaningful than those obtained by Matlab.
satellite tool kit(STK);formation tracking control;decoupling approach
Environmental issues are among the most important problems concerning the whole world.In order to understand and predict global climate,environmental experts use clusters of satellites to m_onitor settings such as animal habitats and river systems[12].To carry out these m issions,a systematicmethod is required for dealing w ith the formation tracking control ofmultiple satellites.
In the literature,most results of satellite formation tracking control focus on the leader-following strate-.Aswe all know,the robustness of this strategy is weak due to no information translation from the follower to the leader and among the follower satellites.Beard et al.[7]proposed a virtual structure to solve satellite formation flying along given orbits butw ith a formation that is rigid.Similar ideas can be found in Refs.[8- 9].For obtaining general formation,Aguiar et al.[10]decoupled the control problem into the trajectory tracking control subproblem and formation control subproblem,which is called the decoupling approach.Sim ilarmethods are used for the decoupling-based cooperative control of underactuated,simple full-actuated aircrafts[13]and 3D nonholonom ic vehicles[14].However,the effect of the decoupling approach is not verified in the field of satellite formation tracking yet._
Most current results[311]about satellite formation tracking are validated by Matlab.Since Matlab simulations ignore the realistic features of satellite and the influences of realistic operating environment,the effects on the given control are difficult to assess.To deal w ith this lim itation,STK software,a professional simulation tool for the satellite systems,is used in this paper.STK verification in this paper follows two steps:1)A trajectory tracking control law derived from the sliding mode control method[13]is given to each satellite for following its desired orbit,which is suitable to confront the gravitational perturbation;and then we use the COM interface supplied by the STK to add the gravitational perturbation and w rite the program to acquire the proposed trajectory tracking control in the STK.2)According to the idea of the decoupling approach,we design the reference formation tracking input for each satellite in two parts.One is the trajectory tracking control input,which is the same as the controller given in step 1),the other is the consensus terms of the generalized arc-length computed by the reference motion along the given orbits and its deviation,which differs from the sliding mode formation fly protocol[6]based on the leader-follow ing strategy.In order to acquire the formation tracking control law in the STK,a timeshare orderly calling plug-in is proposed by C++to accomplish the bidirectional communication in the STK.Finally,we show the STK simulation results of formation tracking control from three satellites.In Refs.[15- 16],some researchers used the STK to study satellite formation flying mission by using the solution of the classical C-W equations.This paper is different in that the C-W equations with the gravitation perturbation are considered and the decoupling-based formation tracking control is testedunder bidirectional communication via STK.
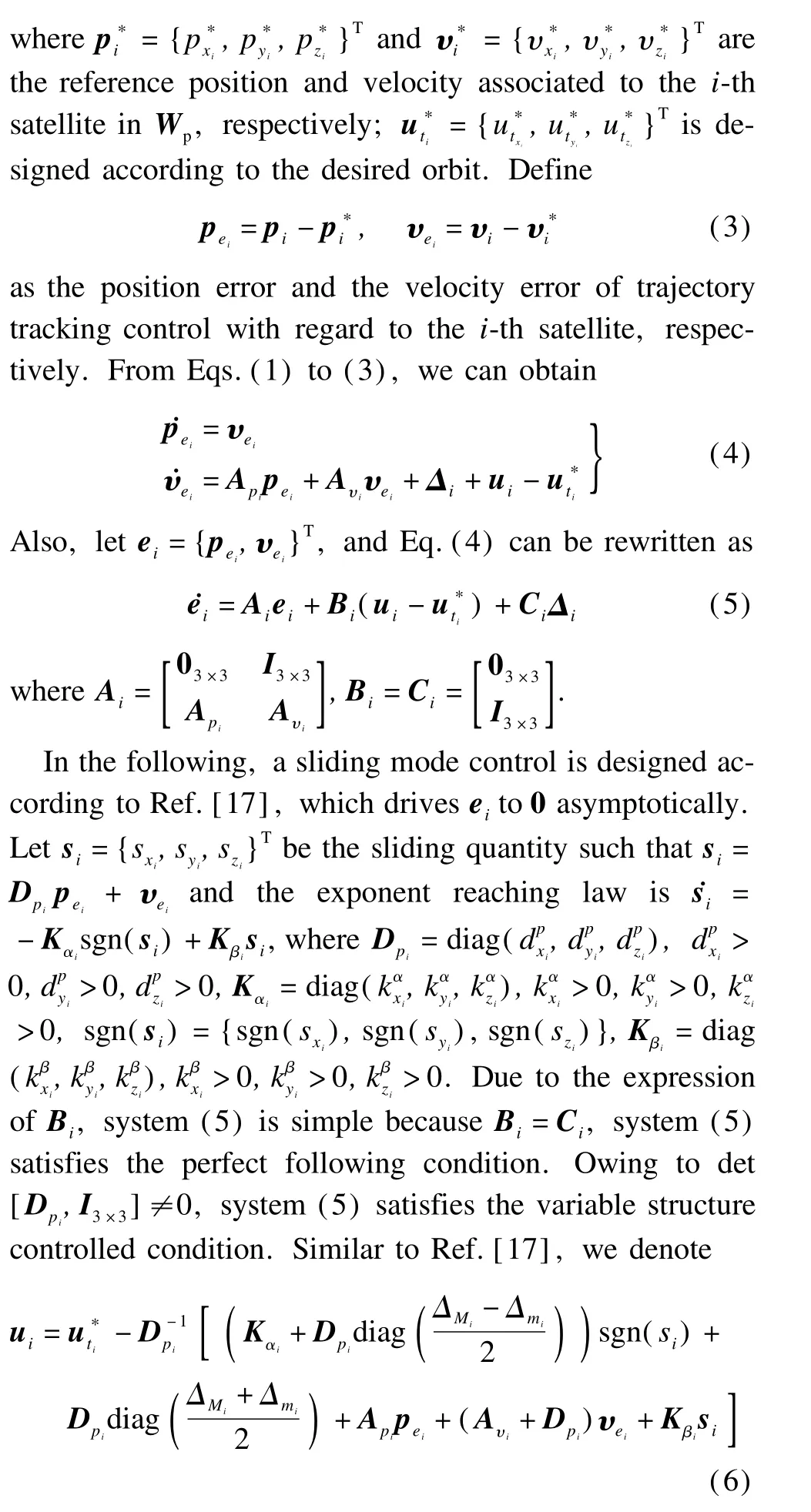
1 Satellite’s Dynam ics
Consider the cooperative system composed of N satellites flying around a reference satellite(see Fig.1).The reference satellitemoves along a circular orbit in the inertial reference frame WI={OI,XI,YI,ZI}and its angular velocity isω0.Suppose that the distance between each satellite and the reference satellite is very small compared w ith the distance from the satellite to the earth.We define the satellite orbit frame Wp={op,xp,yp,zp}such that the origin is located at the mass center of the reference satellite,xp-axis of Wpis in the radial direction from the earth to the reference satellite,yp-axis of Wpis in the tangential velocity direction of the primary satellite and zpaxis completes a right-hand coordinate system.The dynam ics of the i-th satellite in Wpcan be w ritten as

where pi={}Tis the position of the i-th satellite in Wp;υi=}Tis the velocity;Δi=,}Tis the gravitational perturbation and satisfies that max}≤<+∞and m in{}≥>-∞;ui={}Tis the control input;=


Fig.1 Satellite’s dynamics
Remark 1 When the gravitational perturbationΔiis ignored,the dynam ics(1)turns into classical C-W equations which are discussed in Refs.[15- 16].
2 Trajectory Tracking Control Design
2.1 Sliding mode control for trajectory tracking
Let the desiredmotion dynam icsw ith respect to the i-th satellite be

2.2 STK simulations of trajectory tracking
In this subsection,STK software is used to check the effect of the proposed trajectory tracking control(6).The HPOP orbit predictor in STK not only supplies orbit prediction in high precision and for the long term,but also gives the user a COM control interface to add perturbation acceleration.Here,we use HPOP to accomplish(6).The process is as follows.
Step 1 STK call.Since the HPOP orbit predictor gives a COM interface to the user’s programs,the user is required to compile compliant programs and log them in to STK so that they are able to work.
Step 2 Coordinate translation.Since the call of satellite’s states in STK is based on the inertial coordinate system but the trajectory tracking controller is designed for the primary satellite orbit frame,a frame translation is required before running the trajectory tracking algorithmprogram.
Step 3 Working process of algorithm program.The working process of the trajectory tracking algorithm program includes the calculations of the sliding quantity,the exponent reaching law,the desired motion states of the satellite and the control input.
Step 4 Control input recalculation.In this step,the control input computed in the primary satellite orbit frame must be recalculated in the inertial coordinate system.
Step 5 Data record.The states of satellite are recorded and saved in the database,which is prepared for the m ission of formation motion in the next section.
Step 6 STK Return.
Case 1 The desired orbit w ith respect to the satellite is an elliptical orbitwhere the center is located in{0 km,0 km,0 km}T.The semi-major axis length is 200 km,the semi-minor axis length is 100 km,and the period of flying around the primary satellite is 100 s.The control parameters are selected as Dpi=diag(0.01,0.01,0.01),=diag(0.1,0.1,0.1).We set themaximum degree of earth gravity as10 in HPOP to represent the gravitational perturbation.Themovements of the satellites are shown in Fig.2.According to Fig.2,we can conclude that the proposed controller is effective for trajectory tracking when gravitational perturbation exists.

Fig.2 Trajectory tracking movement.(a)Global perspective;(b)Partial enlarged view
3 Formation Tracking Control Design
3.1 Decoupling design for formation tracking control
The key idea of the decoupling design is to decouple the trajectory tracking and formationmotion.For the purpose of applying the decoupling design to deal w ith the formation tracking control of satellites in STK,we first redesign the desired dynam ics associated w ith each satellite(2)in two parts,that is


where control parameters k1,k2,k3>0;A=(aij)is the adjacency matrix associated w ith bidirectional communication and is defined as:aii=0,aijis1 if the i-th satellite and the j-th satellite can transfer data each other and aij=0,otherwise,
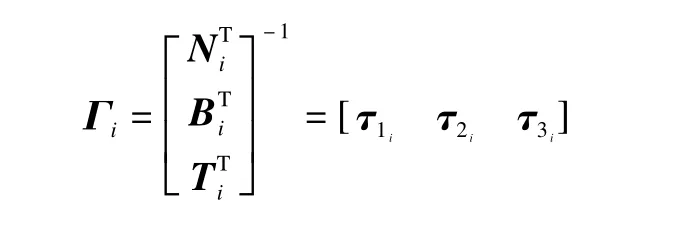
where Ni,Bi,Tiare the normal vector,the binormal vector and tangent vector to the given orbit associated w ith the i-th satellite,respectively.In this paper,the communication topology under consideration is bidirectional and time-invariant.ξiis the general arc-length that is defined as Assumption 1 andηi(t)=;η*is the desired orbit speed designed based on the period of the satellite flying motion.From Eq.(8),one can see that the last two terms are the consensus terms,which are w idely used in the formation tracking control of 2DandThencan achieve both trajectory tracking and formation flying around given orbits.
Assum ption 1 ξi(li)is a C2smooth function of the arc-length lisuch that allis bounded and greater than 0 andis uniform ly bounded.
3.2 STK sim ulations of formation tracking

1)Monopolization of computing resource.One precondition of data translation is that the motions of all satellites can be computed at the same time.However,one computing task of one satellite’smotion uses the computing resource of the STK,which implies that the STK can only compute one satellite’s motion at one time.Thus,the state data cannot be translated among satellites simultaneously.
2)Anonymous Information.The other precondition of data translation is that the owner of the datamust be confirmed.However,the call of the plug-in in the STK is anonymous and thus the STK does not supply the user w ith the name of who owns the data,which is another obstacle to applying the communication link for transferring information in the STK.
To solve these two problems,wew rite a time-share orderly calling plug-in based on C++,which is used to send the data to STK for computing each satellite’s motion in order.The operational principle of the time-share orderly calling plug-in is to cut the sampling time into pieces at first and then use each time fragment to compute themotion of its relative concom itant satellite.The other advantage of the time-share orderly calling method is that it can make the corresponding satellite compute one by one,which provides a solution to solving the problem of anonymous information.In the STK simulations,we output the calculation results into a log file w ith a special name at each end of the time fragments.The flow chart of a formation tracking STK simulation is shown in Fig.3.
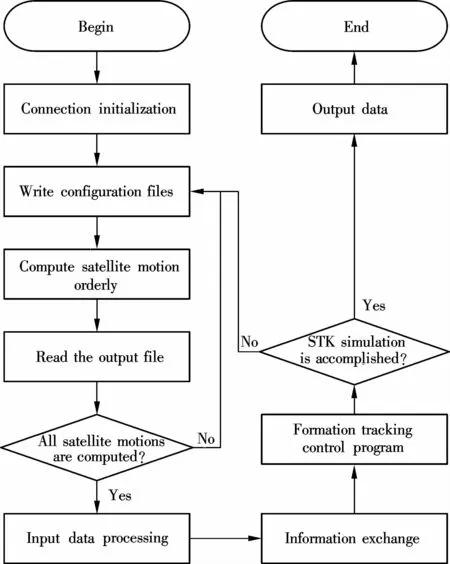
Fig.3 Flow chart of formation tracking STK simulation
Case 2 A triangle formation fly is shown in this case.The communication among three satellites is that the 1st and the 2nd satellites,the 2nd and the 3rd satellites,the 1st and the 3rd satellites can exchange their information.The desired orbitw ith respect to the 1st satellite is an elliptical orbitwhere the center is located at{0 km,0 km,100 km}Tand the semi-major and sem i-m inor axis lengths are 100 and 50 km,respectively.The desired elliptical orbit w ith respect to the 2nd satellite is that the orbit’s center is located at{0 km,100 km,0 km}T,the sem i-major and sem i-minor axis lengths are 75 and 37.5 km,respectively.The desired elliptical orbit w ith respect to the 3rd satellite is that the orbit’s center is located at{0 km,0 km,-100 km}T,the sem i-major and sem i-m inor axis lengths are 100 and 50 km,respectively.The starting point for each orbit for computing arc length liis selected as the intersection of the orbit w ith the horizontal axis.Theξiis selected asξ1=l1,ξ2=l2/0.75 andξ3=l3.The control parameters are Dpi=diag(0.01,0.01,0.01),Kαi=Kβi=diag(0.1,0.1,0.1).The maximum degree of earth gravity is set as the same as Case 1.Themovements of the satellites are shown in Fig.4.According to these pictures,we can conclude that the decoupling approach is effective in designing the formation tracking control for satellites.

Fig.4 Formation tracking movement.(a)Global perspective;(b)Partial enlarged view
4 Conclusion
In this paper,STK is used to study the formation tracking control of satellites.For single trajectory tracking control,a robust control law is proposed by using thesliding model design,which is useful for resisting the gravitational perturbation.To achieve the simulation of formation tracking control in STK,we present the timeshare orderly calling plug-in to accomplish the unity of the simulation,algorithm programs and communication.In the future,we w ill devote ourselves to the field of the finite-time formation tracking control of satellites.
[1]Beard RW,M clain TW,Nelson D B,et al.Decentralized cooperative aerial surveillance using fixed-w ingm iniature UAVs[J].Proceedings of the IEEE,2006,94(7):1306- 1324.
[2]Leonard N E,Paley D A,Lekien F,etal.Collectivemotion,sensor networks,and ocean sampling[J].Proceedings of the IEEE,2007,95(1):48- 74.
[3]Pachter M,Dazzo J J,Dargan J L.Automatic formation flight control[J].AIAA Journal of Guidance,Control and Dynamics,1994,17(6):838- 857.
[4]Gu Y,Seannor B,Campa G.Design and flight testing evaluation of formation control laws[J].IEEE Transactions on Control Systems Technology,2006,14(6):1105 -1112.
[5]Ahn H-S,Moore K L,Chen Y Q.Trajectory-keeping in satellite formation flying via robust periodic learning control[J].Int JRobust Nonlinear Control,2010,20(14):1655- 1666.
[6]Gao Y T.Research on modeling and control techniques for satellite formation flying[D].Nanjing:College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,2010.(in Chinese)
[7]Beard R W,Hadaegh F Y.Constellation templates:an approach to autonomous formation flying[C]//Proc of World Automation Congress.Anchorage,Alaska,USA,1998:177-1- 177-6.
[8]Stipanovic D M,Inalhan G R,Tom lin C J.Decentralized overlapping control of a formation of unmanned aerial vehicles[C]//Proc of the 41st IEEE Conference on Decision and Control.Las Vegas,USA,2002:2829- 2835.
[9]Tillerson M,Brege L,How JP.Distributed coordination and control of formation flying spacecraft[C]//Proc of Amer Contr Conf.Denver,USA,2003:1740- 1745.
[10]Aguiar A P,Ghabcheloo R,Pascoal A,et al.Coordinated path-follow ing control of multiple autonomous underwater vehicles[C]//Proc of International Offshore and Polar Engineering Conference.Lisbon,Portugal,2007:1073- 1079.
[11]Chen Y Y,Tian Y P.A curve extension design for coordinated path follow ing control of unicycles along given convex loops[J].International Journal of Control,2011,84(10):1729- 1745.
[12]Chen Y Y,Tian Y P.Formation tracking and attitude synchronization control of underactuated ships along closed orbits[EB/OL].(2014-10-06)[2015-04-08].http://onlinelibrary.w iley.com/doi/10.1002/rnc.3246/abstract.
[13]Chen Y Y,Tian Y P.Formation path follow ing control for multiple aircrafts in three-dimensional space[J].Journal of Southeast University:Natural Science Edition,2010,40(6):1190- 1195.(in Chinese)
[14]Chen Y Y,Tian Y P.Coordinated adaptive control for three dimensional formation tracking w ith a time-varying orbital velocity[J].IET Control Theory Appl,2013,7(5):646- 662.
[15]Wu X,Zhang JH.Formation control and simulation w ith STK for formation flying[J].Computer Simulation,2007,24(3):66- 68.(in Chinese)
[16]Feng Y X,Wu JH.The research of small satellite formation flying simulation based on STK[J].Fire Control and Command Control,2011,36(3):67- 70.(in Chinese)
[17]Gao W B,Chen M.Quality control of variable structure control systems[J].Control and Decision,1989,4:1-6.(in Chinese)
基于双向通信的卫星寻迹编队任务的STK仿真设计
陈杨杨1,2张国熙1冯 源1卫 平3
(1东南大学自动化学院,南京210096)
(2东南大学复杂工程系统测量与控制教育部重点实验室,南京210096)
(3安徽商贸职业学院电子信息工程系,芜湖241002)
基于STK仿真软件研究了多卫星寻迹编队控制问题.利用滑模控制方法设计单颗卫星轨迹跟踪控制律用以对抗引力摄动,同时在STK仿真环境中验证了该算法的有效性.为了在STK中实现基于双向通信的卫星寻迹编队任务,利用C++语言设计了一个分时有序调用插件解决了STK仿真中的计算独占的问题和仿真计算中心不返回当前卫星标识符的问题.在此基础上,利用STK仿真验证了解耦法设计的寻迹编队算法的有效性,STK仿真结果比Matlab仿真结果更有实用意义.
卫星工具包;寻迹编队控制;解耦法
TP24
10.3969/j.issn.1003-7985.2015.03.010
2014-12-06.
Biography:Chen Yangyang(1981—),male,doctor,associate professor,yychen@seu.edu.cn.
s:The National Natural Science Foundation of China(No.61203356,61473081,61374069),the Ph.D.Programs Foundation of M inistry of Education of China(No.20110092120025),the Open Fund of Key Laboratory of Measurement and Control of Complex Systems of Engineering of M inistry of Education(No.MCCSE2014B01),the Priority Academ ic Program Development of Jiangsu Higher Education Institutions.
:Chen Yangyang,Zhang Guoxi,Feng Yuan,etal.STK simulation design for satellite formation tracking m ission w ith bidirectional communication[J].Journal of Southeast University(English Edition),2015,31(3):358- 362.
10.3969/j.issn.1003-7985.2015.03.010
猜你喜欢
杂志排行
Journal of Southeast University(English Edition)的其它文章
- CoMP-transm ission-based energy-efficient scheme selection algorithm for LTE-A system s
- Detection optim ization for resonance region radar w ith densemulti-carrier waveform
- Dimensional emotion recognition in whispered speech signal based on cognitive performance evaluation
- Cascaded projection of Gaussian m ixturemodel for emotion recognition in speech and ECG signals
- Action recognition using a hierarchy of feature groups
- Ergodic capacity analysis for device-to-device communication underlaying cellular networks