陀螺仪滚动轴承-转子系统非线性动力特性分析
2015-07-25何聪张耀强徐红玉
何聪,张耀强,徐红玉,
(河南科技大学 a.机电工程学院;b.土木工程学院,河南 洛阳 471023)
近年来,随着航天技术的飞速发展,陀螺仪转子系统工作转速越来越高(高达数万转),且要求尽可能减轻系统自身结构重量。这种高转速、轻质量的结构使转子系统的性能得以提高,但容易造成系统失稳。滚动轴承-转子系统是常规机械式陀螺仪的关键部件,其精度、灵敏度、寿命和可靠性等决定了陀螺仪系统的整体性能。由于滚动轴承-转子系统比滑动轴承-转子系统更为复杂,包含诸如变柔度、间隙和Hertz 接触应力等强非线性因素,使得目前关于滚动轴承-转子系统的非线性动力学行为的研究成果极为有限[1]。大多数文献是针对普通结构的滚动轴承-转子系统进行研究。文献[2]研究了滚动轴承支承下的不平衡转子系统的非线性动力响应,发现了通往混沌的倍周期分叉、拟周期环面破裂和阵发性分叉途径。文献[3-4]研究了滚动轴承支承的平衡转子和不平衡转子的动力学响应,并给出了滚动轴承径向间隙对转子系统非线性动力响应的影响规律。文献[5]研究了不同间隙的滚动轴承平衡转子的分岔和混沌等特性。文献[6]分析了滚动轴承-Jeffcott转子系统的非线性动力响应特性。文献[7]研究了滚动轴承非线性轴承力及其对轴承系统振动特性的影响。
文中研究的陀螺仪滚动轴承-转子系统采用整体内圈式轴承单元结构。与其他形式的滚动轴承-转子系统的最大不同是省去了内圈,内沟道直接加工在转子轴上,减少了转子系统的零件数,降低了轴承装配误差和转子轴定位误差,增强了轴承系统的刚度。依据Hertz弹性接触理论和滚动轴承运动学分析,建立了考虑非线性轴承力的陀螺仪滚动轴承-转子系统的动力学方程,并用数值方法进行求解,研究了陀螺仪滚动轴承-转子系统的非线性动力特性。同时,计算了系统在不同参数下的最大Lyapunov指数,以进一步验证分析结果。
1 动力学分析模型
滚动轴承-转子系统模型如图1所示。图中Oe为外圈圆心;O为转子中心;Q为滚动轴承总恢复力;θj为第j个钢球的角位置。根据其整体内圈式轴承单元的结构形式,假设外圈与机架刚性连接,钢球等距离分布在内外沟道之间,且以相等速度沿沟道作纯滚动[8]。
系统的非线性激励来自非线性轴承力、变柔度等因素,当转子轴回转时,轴上施加的力仅由承载区的钢球承受,如图2所示。钢球进入承载区时,在径向力Qr作用下产生弹性变形,当钢球离开承载区进入非承载区时,弹性变形恢复(Q为弹性恢复力)。在回转的过程中,钢球依次进入承载区,承载区钢球数目周期性变化,不同状态下轴承径向柔度是不同的,在计算的过程中应时刻考虑柔度的周期性变化。

图2 变柔度激励
依据Hertz弹性接触理论,轴承总恢复力Q为[9]
(1)
j=1,2,…,Z,

式中:Kw为钢球与沟道载荷变形系数;Z为钢球数目;x,y为转子轴心在x,y方向的位移;Gr为轴承径向游隙;ωcage为保持架角速度。下标“+”表示只计入(1)式括号内取正数时的数值,否则取0。
2 滚动轴承-转子系统动力学方程
根据Lagrange方程,该系统的动力学方程可表示为
(2)
式中:m为轴承及其附件的总质量,kg;c为阻尼系数,N·s/m;Qr为作用在转子上的径向力,N;n为转子的转速,r/min;e为转子的偏心量(取e=0)。
3 系统非线性动力学特性分析
由于系统受到非线性轴承力、游隙、变刚度等因素的影响,采用自适应Runge-Kutta法求解系统运动微分方程,基于Wolf法计算系统的最大Lyapunov指数λ,其是描述动态系统混沌的重要参数[10]。通过分岔图、Poincaré映射图和FFT频谱图等方法研究转子系统非线性特性随参数变化的规律。详细求解过程如图3所示。
以某陀螺仪轴承为例,该转子系统的主要参数为:m=0.073 3 kg,Kw=3.78×109N/m1.5,Qr=10 N。轴承参数见表1,表中Ri,Re为内、外圈沟道半径;Dw为钢球直径;BN为与轴承尺寸有关的系数。
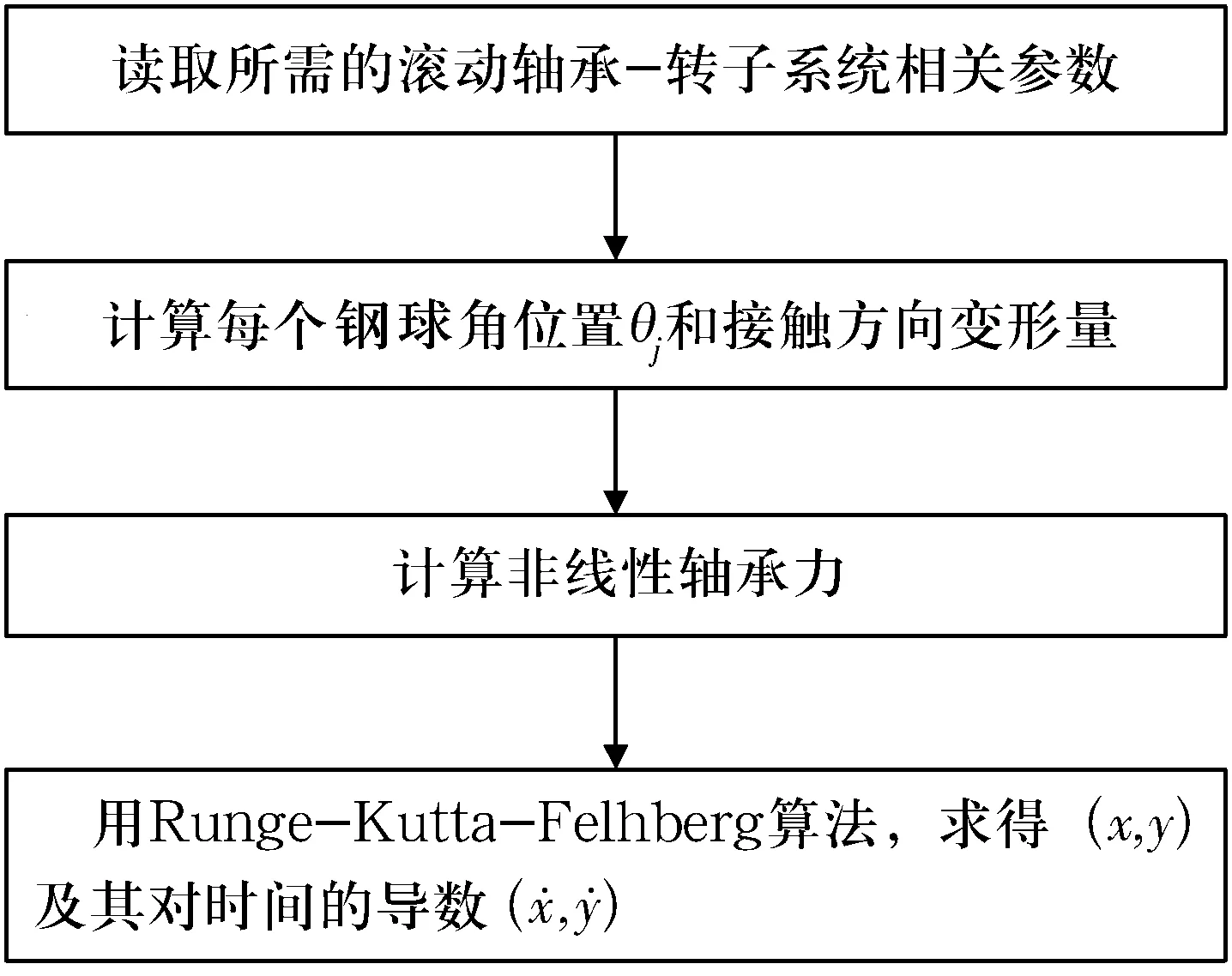
图3 求解过程流程图

表1 滚动轴承参数
3.1 转速对转子系统动力响应的影响
当转速n=1 000 ~30 000 r/min时,x方向转子位移-转速的分岔图及其局部放大图分别如图4和图5所示,其反映转子系统动力响应的整体分岔情况。

图4 x方向位移-转速分岔图

图5 局部放大分岔图
由图可以看出,在该转速范围内,转子系统的响应存在多种周期运动以及拟周期运动和混沌、分岔现象。当n<7 200 r/min时,系统呈周期运动;在转速由10 000 r/min逐渐降到7 500 r/min的过程中,系统由1周期经历倍周期分岔后进入混沌;当26 700 r/min≤n≤27 000 r/min时,系统呈拟周期运动。
为进一步分析在不同转速下系统的动力学特性,对临界转速处(n=7 500,17 080,17 100,26800 r/min)的Poincaré图、频谱图、相图和轴心轨迹进行研究,结果如图6~图9所示。

图6 n=7 500 r/min的Poincaré图、频谱图、相图和轴心轨迹
由图6可知,当n=7 500 r/min时,系统的Poincaré图中在一定的区域内分布着无数个点,频谱图为连续的宽频谱,相图和轴心轨迹表现为一种类随机运动。由此可知,当n=7 500 r/min时,系统呈现混沌响应。

图7 n=17 080 r/min的Poincaré图、频谱图、相图和轴心轨迹
由图7可知,当n=17 080 r/min时,Poincaré图中可以看到16个离散的点,系统为16周期振动,系统的相图为封闭曲线,频谱图为一离散的谱线,且其对应的频率可共约。
由图8可知,当n=17 100 r/min时,Poincaré图中有8个离散点,系统为8周期振动,并且其频谱图、相图和轴心轨迹均表明此时系统处于周期运动;转速在17 080 ~17 500 r/min的范围内发生了倍周期分岔。

图8 n=17 100 r/min的Poincaré图、频谱图、相图和轴心轨迹

图9 n=26 800 r/min的Poincaré图、频谱图、相图和轴心轨迹
由图9可知, Poincaré图中的封闭曲线、频谱图中不可相约的频率分量以及相图中环面不重复的运动轨线均表明系统处于拟周期状态。
由此可知,随着转速的不断增加,转子系统产生了多种类型的响应形式,如周期、拟周期、分岔和混沌,并且存在倍周期分岔。当转子系统的响应为周期响应时,系统的运行较平稳。对于高转速的陀螺仪转子系统,当转速处于22 800 ~25 200 r/min范围时,系统运行平稳。因此要选择合理的工作转速,使转子转速避开混沌响应区域,降低系统运行的不稳定性。
最大Lyapunov指数λ随转速的变化情况见表2。从表中可以看出,当n=7 500 r/min时,λ为0.231 4,大于零,系统为混沌运动;当n=17 080 r/min和17 100 r/min时,λ分别为-0.023 7和-0.037 7,小于零,系统为周期运动;当n=26 800 r/min时,λ为0.000 45,接近于零,系统为拟周期运动。因此,与Poincaré图、频谱图、相图和轴心轨迹所得结论一致。

表2 不同转速下最大Lyapunov指数
3.2 不同阻尼对转子系统动力响应的影响
当转速为17 500 r/min时,x方向位移随阻尼变化分岔图及其局部放大图分别如图10和图11所示。由图可知,随着阻尼的逐渐增大,系统的响应形式由混沌运动开始,然后经历了4周期和2周期,最终响应稳定到1周期,可以明显看出系统出现了倍周期分岔。

图10 x方向位移-阻尼分岔图

图11 局部放大分叉图
阻尼系数c为80 N·s/m和120 N·s/m时系统的Poincaré图和频谱图分别如图12和图13所示。由图可知,当阻尼系数c=80 N·s/m时,系统的Poincaré图中有4个离散点,系统为4周期振动,频谱图为离散的谱线,且其谱线所对应的频率可共约;当阻尼系数c=120 N·s/m时,系统处于2倍周期运动,在此过程中系统发生了倍周期分岔现象。

图12 c=80 N·s/m时Poincaré图和频谱图

图13 c=120 N·s/m时Poincaré图和频谱图
当阻尼系数c为200 N·s/m时,系统的Poincaré图如图14所示。由图可知,当阻尼系数大于200 N·s/m时,响应稳定在1周期振动。因此,在滚动轴承转子系统中,并非阻尼系数越小系统越稳定,足够大的阻尼系数反而能够抑制系统的非线性振动。

图14 c=200 N·s/m时Poincaré图
最大Lyapunov指数λ随阻尼系数变化的情况见表3。当阻尼系数为50 N·s/m时,λ为0.387 2,大于零,表明系统处于混沌运动状态;当阻尼系数为8 050 N·s/m和120 N·s/m时,λ分别为-0.047 2和-1.028 9,小于零,表明系统处于周期运动状态。因此,与Poincaré图和频谱图所得结论一致。

表3 不同阻尼系数时的最大Lyapunov指数
4 结束语
建立了考虑非线性轴承力的陀螺仪滚动轴承-转子系统的非线性动力学方程,采用Runge-Kutta算法求解在不同参数条件下系统的分岔图、Poincaré映射图、频谱图、相图和轴心轨迹,分析了转子系统出现周期、拟周期和混沌响应的参数范围,依据系统的最大Lyapunov指数验证了系统的非线性特性。结果表明,随着转子系统结构和工作参数的变化,系统的响应中表现出丰富的周期振动和拟周期、混沌等的非周期振动,并且存在倍周期分岔的现象。选择合理的参数(转速、阻尼)可有效提高系统的稳定性。研究结果可为该类转子系统的设计和故障诊断提供参考依据。
