车载飞轮电池用无轴承永磁同步电动机神经网络控制
2015-07-25高海宇孙晓东杨泽斌
高海宇,孙晓东,杨泽斌
(1.意昂神州(北京)科技有限公司,北京 100085;2.江苏大学 a.汽车工程研究院;b.电气信息工程学院,江苏 镇江 212013)
作为环境友好型的电动汽车,以节能优势很好地缓解了当前世界面临的环境污染与能源匮乏问题[1]。车载储能电池技术作为电动汽车的能量来源,是促进电动汽车产业不断持续发展的关键技术之一。目前,在车载动力电池系统中,飞轮电池以其比能量高、比功率大、充电快、绿色环保等突出优点受到了国内外的高度重视[2]。
采用机械接触式轴承支承车载动力电池系统中高速运行的电动机时,轴承磨损严重,使用寿命缩短,影响车载动力电池系统的性能。磁轴承具有无机械摩擦、无需润滑、低噪声、长寿命等优点,可以很好地克服机械接触式轴承的上述缺点[3-4]。将磁轴承技术与传统电动机相结合,形成了无轴承电动机(也称磁悬浮电动机)[5-7]。
常规的磁悬浮飞轮储能电池系统由1个单自由度轴向磁轴承、2个二自由度径向磁轴承以及1台高速电动机组成,具有体积庞大、结构复杂、成本较高等缺点。如果采用集径向和轴承悬浮功能的三自由度磁轴承以及集自悬浮和旋转功能的二自由度无轴承电动机共同构成磁悬浮飞轮储能电池系统,不但可以节省磁轴承数,降低功率损耗,而且可以大大提高转子的轴向利用率及无轴承电动机的临界转速,从而进一步增大磁悬浮飞轮储能电池系统的比容量和比功率。
具有自学习功能的单神经元PID可以克服常规PID控制方法的不足,使系统具有较强的鲁棒性[8]。径向基函数神经网络(RBFNN)具有较快的收敛速度以及较强的全局逼近能力,在解决一般非线性的控制方面被广泛应用[9]。因此,以用于飞轮储能电池系统的二自由度无轴承永磁同步电动机(BPMSM)为例,提出了一种RBFNN在线辨识的BPMSM单神经元PID控制方法,在MATLAB仿真平台上对该方法进行仿真分析,将其与常规PID控制方法进行了对比研究。
1 BPMSM数学模型
BPMSM定子槽内叠绕着极对数相差为1的径向力绕组与转矩绕组,其中由径向力绕组产生的气隙磁场改变了原先由转矩绕组建立的气隙磁场分布,使得电动机一侧的气隙磁密增强而相对的一侧气隙磁密变弱,从而产生了方向朝磁密增强一侧的麦克斯韦力[10],BPMSM径向力在旋转d-q坐标系下可表示为
(1)
式中:Fα和Fβ分别为α和β方向的径向力;is2d和is2q分别为d-q坐标系下的径向力绕组电流分量;Ψ1d,Ψ1q分别为d-q坐标系下转矩绕组的气隙磁链分量;KM为麦克斯韦力常数;KL为洛仑兹力常数;l为电动机定子铁芯长度;r为电动机定子内径;μ0为空气磁导率;Lm2为径向力绕组互感;PM,PB分别为2套绕组的极对数;W1,W2分别为2套绕组的匝数;kW1,kW2分别为2套绕组的系数。
BPMSM电磁转矩和转速方程为
(2)
式中:T和TL分别为电磁转矩和负载转矩;ω为转速;is1d和is1q分别为d-q坐标系下BPMSM转矩绕组电流分量;Jz为转动惯量。
2 单神经元PID
3输入单神经元PID控制器的结构示意图如图1所示,其中PID控制器的比例、积分、微分3个系数分别采用单神经元的3个连接权系数代替[11];xi(i=1,2,3)表示输入变量;wi和K分别为输入变量xi的权系数和神经元的比例系数;u为输出变量。

图1 单神经元PID控制器结构示意图
取神经元的输入为
(3)
式中:r(k),y(k)和e(k)分别表示输入量、反馈量和误差。神经元输出量为
u(k)。
(4)
系统误差的二次性能指标函数定义为
(5)
对权系数wi(k)沿着二次性能指标函数J的递减方向进行调节,使J取最小值。J关于wi(k)的梯度为
(6)
由此可得
(7)
式中:ηi(i=1,2,3)为比例、积分、微分的学习率。
3 RBFNN结构
3层RBFNN的结构示意图如图2所示[12],其中输入层的节点数为k=1,2,…,n,隐含层节点数j=1,2,…,m。在RBFNN结构中,Z=[z1,z2,…,zn]T和H=[h1,h2,…,hm]T分别表示网络的输入向量和径向基向量,V=[v1,v2,…,vm]T为网络的权向量。hj高斯基函数为
(8)
式中:bj为网络第j个节点的基宽参数;cj为网络第j个节点的中心向量。
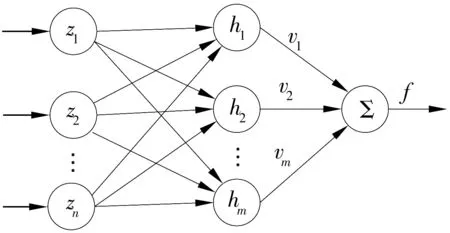
图2 RBFNN结构图
RBFNN的输出为
(9)
定义辨识网络的性能指标E为
(10)
通过动态递推算法和递归最小二乘算法分别实现RBFNN中心向量的调整以及线性层连接权值的学习,宽度可以采用直接计算的方法确定。
4 BPMSM的神经网络控制
车载动力电池系统用BPMSM神经网络控制的系统框图如图3所示。图中,rα,rβ和rω分别表示BPMSM的3个输入变量(α,β方向的径向以及转速);yα,yβ和yω分别表示BPMSM对应的3个输出变量。NNI和NNC分别表示BPMSM的RBFNN辨识网络模型以及闭环单神经元PID控制器;uα,uβ和uω分别表示NNC对应的3个输出变量;fα,fβ和fω分别表示NNI对应的3个输出变量。具体的控制算法如下(以一路为例):
(1)RBFNN的参数vj,cj和bj分别取[-1,1]之间的随机数。
(2)对BPMSM进行采样,获取系统k时刻的输入r(k)与输出y(k),由(3)式计算e(k),e(k-1)和e(k-2)。
(3)由 (4)式计算k时刻单神经元的输出u(k),同时传送给被控的BPMSM系统与辨识的BPMSM模型,从而得到k+1时刻的实际输出与辨识输出。
(4)由 (9)式计算RBFNN的输出,RBFNN的输出为f(k+1),目标值为实际输出y(k+1)。
(5)将f(k+1)与y(k+1)进行比较,利用得到的偏差调整RBFNN的权值系数阈值。
(6)将r(k+1)与y(k+1)进行比较,利用得到的偏差调整单神经元的权值。先计算∂y(k+1)/∂u(k),取f(k+1)≈y(k+1),则有
(11)
权值调整公式为
wi(k)。
(12)
(7)令k=k+1,返回(2)继续计算。
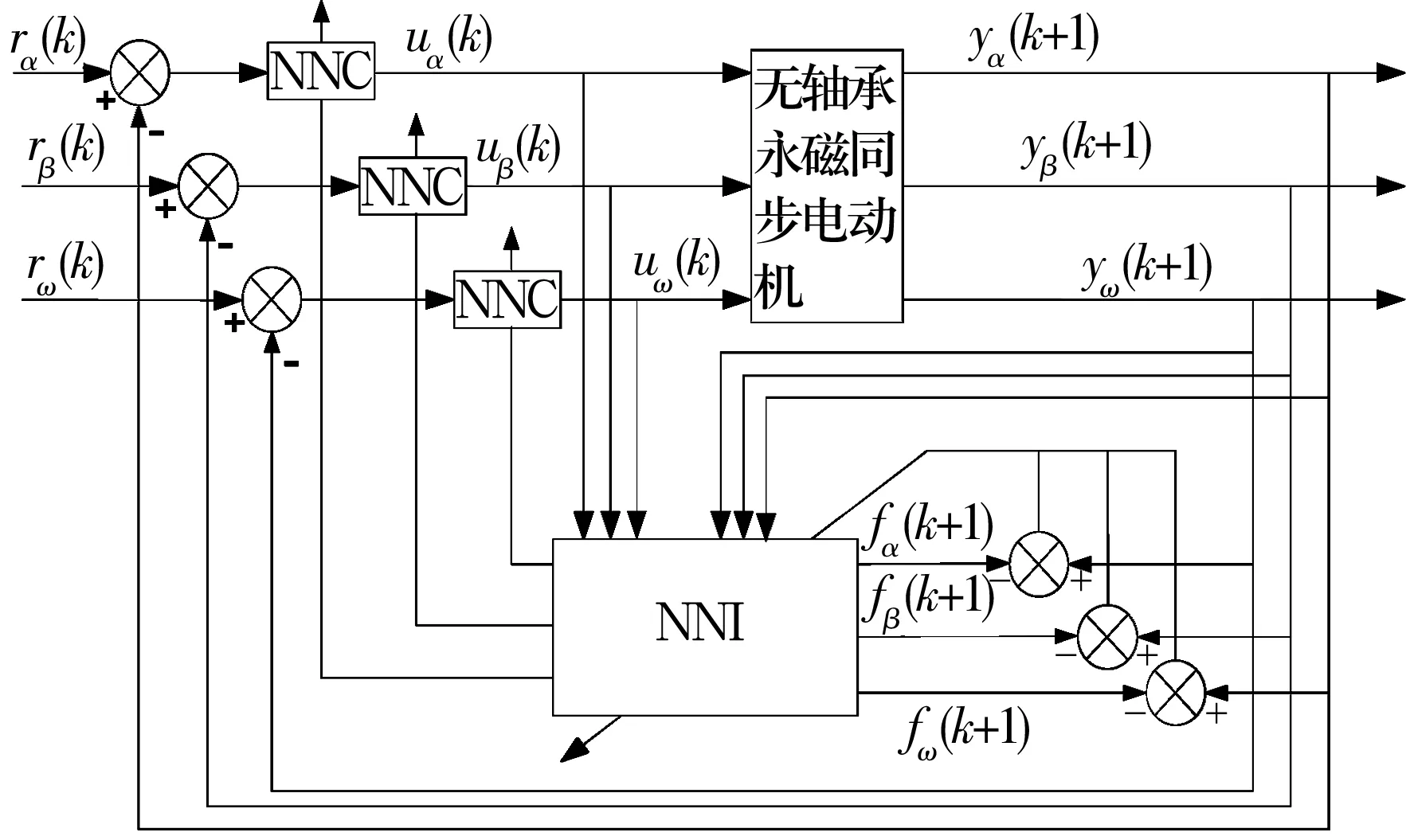
图3 BPMSM神经网络控制系统结构图
5 仿真研究
为了验证控制策略的有效性,在MATLAB/Simulink仿真环境下构建BPMSM神经网络的仿真系统进行仿真研究,仿真参数采用试验样机参数,以1台功率为2 kW,PM=1,PB=2的表贴式BPMSM为例,具体参数见表1。

表1 电动机主要参数
传统PID及RBFNN控制的仿真结果如图4和图5所示。其中图4a与图5a分别为采用2种控制方法的速度响应曲线,图4b与图5b分别为采用2种控制方法的转子质心从开始起浮直至稳定悬浮的运动轨迹曲线。对比可知,采用RBFNN控制策略时,BPMSM速度响应变快,调节时间从原来的0.28 s降低为0.13 s,缩短了50%以上,且转速超调量几乎为零;转子的运动轨迹以内螺旋状更快地逼近平衡中心点,α和β方向径向位移的峰峰值从0.2 mm下降为0.15 mm,降低了25%。由此可见,RBFNN控制策略可以显著改善RPMSM系统的动、静态特性。

图4 PID控制的仿真结果

图5 RBFNN控制的仿真结果
6 结束语
针对车载磁悬浮飞轮储能电池用BPMSM这个多变量、非线性、强耦合的时变系统,提出了新型BPMSM系统神经网络控制方法。通过RBFNN辨识BPMSM输入输出的映射关系,建立了BPMSM系统的在线模型,同时为单神经元PID闭环控制器提供了梯度信息,实现了BPMSM系统参数的在线辨识和调整。对二自由度表面贴装式车载磁悬浮飞轮储能电池用BPMSM进行了仿真分析,结果表明,该控制策略能够显著提高BPMSM系统的静态和动态性能。
