基于智能车载系统信息采集的传感器研究
2015-07-12徐硕匡云
徐硕,匡云
(华东理工大学,上海 200030)
基于智能车载系统信息采集的传感器研究
徐硕,匡云
(华东理工大学,上海 200030)
今天,汽车装备了数以百计的微型传感设备,本文将突出展示现如今或不远的将来安装在汽车上的传感器。本文的目的仅仅是为读者对这些系统做一个概述,而不深入阐述这些系统背后的技术。本文的最后还会简单介绍一个华东理工大学大学生创新实践项目——基于车载的移动智慧云端信息平台的开发所开发出来的一套辅助驾驶系统,包括介绍道路偏移预警系统的工作原理、算法流程,以及简介该系统用到的各类传感器的功能。
智能汽车;车载传感器;车道偏移预警
CLC NO.:U463.6 Document Code:A Article ID: 1671-7988(2015)05-58-06
1、介绍
如今车用电子设备开始从根本上改变汽车行驶的方式,这在几年前来看似乎是不可能的。基于电子系统的引擎控制与ABS系统现在是大多数汽车的标准特征。
通常,如传感器或是制动器这样的电子系统要想成功的渗透入市场,其基本要求是小型化、低价化,并且要集成更多的功能以以及组件的质量一定要过关。
一辆智能汽车的输入层是包括车上的传感器的感知层,比如GPS、雷达、激光定位器,然而输出包括制动层。因此,感知和制动关闭了智能汽车系统的发展环。
2、传感
感知环境是未来智能交通系统的基本要素之一。 汽车工业中有着成千上万种传感器:从与车一体的车内传感器,到基于雷达或激光雷达的感知传感器,再到“虚拟”传感器。从“虚拟”这个词,我们能够得知该传感器虽然也在汽车工业中应用广泛,但它们不用真实的传感器去感知外部环境却能得到真实感知。
2.1 一般车载传感器
这类传感器包括在车辆生产过程中安装在汽车上的一般传感器。这类传感器有数百个,但是本文的重点是介绍其中对高级驾驶辅助系统(ADAS)有帮助的那些。下面是对如今市面上已经存在或即将问世的一些最有代表性的传感器加以论述。
2.1.1 偏航角速度传感器
偏航角速度传感器测量物体沿一选定的轴运动时的偏移角度。某些情况下我们可以用术语:“陀螺仪”或“角速度测量传感器”来指代这些传感器。在汽车领域,偏航角速度传感器被用来测量汽车偏离垂直轴的角速度。此传感器返回的结果是通常为角度秒或弧度秒。
偏航角速度传感器应用到汽车领域需要有些特别的注意。必须正确地测量以mg为范围的科里奥利加速度,并且在同一时间每g的范围内发生的加速度必须不干扰到传感器的正常运行。
在汽车领域利用这种传感器的应用主要有以下几种:
电子稳定程序 (ESP) ,车辆动态控制 (VDC)。
导航(结合GPS与加速度仪信息)
翻滚保护
曲线测速预警(与数字地图相结合)
2.1.2 加速计
加速计是测量正确加速度的装置。单轴与多轴加速计模型在市场上有售,在这一点上,应当强调指出,在某些情况下横摆率和加速度传感器被放置在同一个集成电路中。
基于加速计有大量的应用,从医学、生物学到赌博和航海。在汽车方面,加速计主要用作导航。惯性导航系统(INS)是一种用一台电脑以及类似角速度或加速度传感器等的动作传感器去时时基于位置、方向或移动物体的速度而不需要外部引用推算航向的一种帮助导航系统。
2.1.3 轮胎速度传感器
轮胎速度传感器是一种转速计。它不直接监控车速而是传感轮胎圆周的运动。它实际上是在读取轮胎旋转的速度。有两种主要的轮胎传感器类别:被动型以及活跃型。被动型传感器不需要电力供给,然而活跃型传感器的正常运转需要外接电源。
分别附着到各个车轮上的轮速传感器,设计用来检测转子的旋转,这些转子与轴承以及各自的车轮相连来检测行驶的车辆的车轮速度。汽车的轮速传感器通常利用安装在车轮上的索引盘工作,车轮上再安装一个检测器,这个传感器覆盖在轮盘上检测标记原件的通路。这个传感器可以基于机械、光或者电磁。
轮速传感器是防抱死制动系统(ABS),牵引力控制系统(TCS),或者与之类似的功能器件的关键组件。
2.1.4 转向角度传感器
方向盘的旋转角度是由转向角传感器测得的。转向角度传感器被安装在转向轴上。转向角度传感器技术在 20世纪90年代就已经很成熟了。车载应用测量转向角度可以用许多种不同种类型的传感器来实现,比如使用基于光学、磁电感、电容、电阻传感器等的传感器。
这种传感器有双电位器90度偏移。由这两个电位确定转向盘角覆盖一个完整的方向盘转向;每一个值到 180度后会被复制。传感器相应地计算方向盘转数。因此整个方向盘角是由当前的方向盘角和方向盘转动的数量决定的。转向角传感器必须不间断的检测方向盘角,甚至当车辆静止时。
转向角传感器用于汽车智能电子控制或援助系统,如ESP系统、积极指导系统、先进的照明系统、车道偏离告警系统、导航系统等等。
2.1.5 其他传感器
还有成百上千的其他传感器用于车辆系统。明确的说他们包括轮胎压力传感器、温度传感器、雨传感器和燃料传感器。对于更多信息,感兴趣的读者可参考 Marek et al.(2003)[1]。
2.2 感知传感器
感知传感器广泛地用于世界各地的研究中,但是由于它们的价格问题,使安装他们仅仅是豪华车的特权,而在在大众汽车市场上很少见。环境感知系统、辅助驾驶和其他安全功都是基于雷达、激光、视觉、超声波的传感器重要运用。他们也是最重要的感知传感器,下面让我们来对它们的特性进行分析。
2.2.1 雷达传感器
车载领域用到雷达技术通常是为了提高道路的安全性。针对不同的目的以及针对不同的应用,市面上有两种不同的雷达传感器,即短程雷达和远程雷达。这些雷达具有不同的技术特征并且在不同的频率下运行。下面的段落中将突出描述有关雷达传感器的更多细节。
短程雷达(SRR)
24GHz是短程雷达传感器已被分配的一个“临时”频段,但是该频段也被用于其他无线电设备,如果太多的雷达设备在同一区域同时操作将会遭受干扰。为此,在这个频率太拥挤前它就会被关闭而引进新设备。79GHz已经被“永久”的分配,这将允许这种雷达服务长远发展。欧盟委员会2004/545/EC号决议要求此频段所有欧盟成员国都可以使用。
SSR测定的对象是距离、速度还有方向角。它是一种超宽带(UWB)脉冲雷达,其工作时的24 GHz的载波频率。事实上,它会发送一个超宽带脉冲,然后测量从传感器经由对象返回到传感器的脉冲飞行时间(TOF),来计算反射物体的距离。
这些传感器主要安装在车辆的侧部区域用来检测对象(其他车辆,护栏等)到本车的距离。此外,它们经常被用于监视车辆的后方区域,有时它们在车前区域补充远程雷达传感器。由于考虑到这些传感器各自的作用域是有限的,为了覆盖车辆周围感兴趣区域,通常它们被组合成一个网络。
防冲突是SRR传感器的主要功能。这正在发展成为一个系统的一部分,用以警告司机的未决碰撞,从而采取必要的避免行为。在不可避免发生碰撞的情况下,车辆会做好准备(例如,通过应用刹车,预张紧安全带),以尽量减少乘客和其他人的受伤。此外,这种传感器使以下功能成为可能:
辅助停车系统
盲点检测
前方和侧面的预碰撞检测
短程传感器ACC停和走功能
表1给出了一些一般性的SRR传感器的技术特点
远程雷达(LRR)
LRR结构的传感器的工作频率通常在施加频率调制连续波(FMCW)或脉冲多普勒操作76-77 GHz频带。
该传感器的范围可达150-200米,但其作用域仅11-12度(更多详细信息在表2中)。通常,该传感器位于前保险杠的中间,并且用于正面碰撞避免应用程序。也有些情况下他们被装在后保险杠中观察后方,或者在前保险杠上安装两个此传感器用来扩宽感知面积。
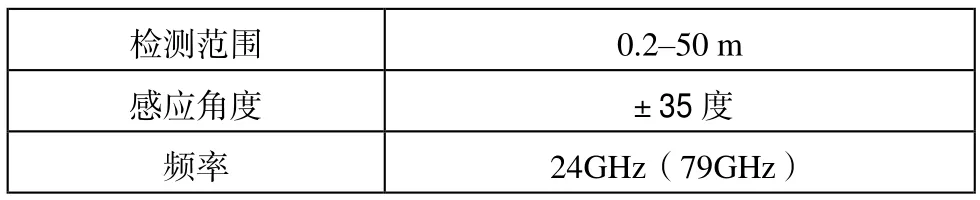
表1 短程雷达规范
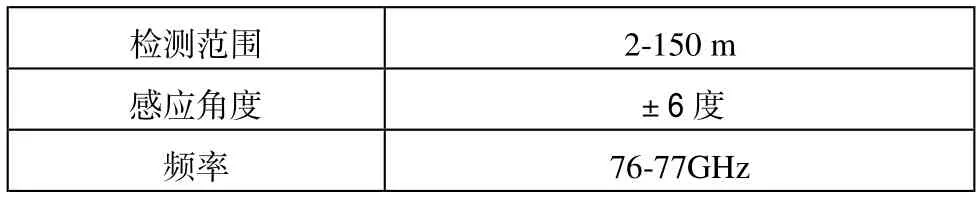
表2 远程雷达规范
与LLR传感器相关的典型应用是自适应巡航控制(ACC),其使搭载车辆维持与前方车辆的安全距离和速度。然而,LRR传感器还可用于其它安全领域诸如防撞等方面的应用。
事实上LRR利用耐候性技术,尽管如此,针对天气整体的鲁棒性仍是无法实现的。在极端天气情况下,传感器的完整的功能是无法保证的。大量的灰尘可能降低传感器的感知能力。此外,在弯曲的道路段由于该传感器的窄水平检测角度限制了它的发挥。
2.2.2 激光扫描仪
激光扫描仪的测量根据传播时间原则。一束定义了发出时间的激光脉冲被同一对象发送并接收。在这个光电子电路中来自物体的反射是由一个光电二极管捕获并转换成电信号。传感器通过适当地考虑光的传播速度、发送和接收其反射光脉冲之间的时间间隔,来计算光源与物体的距离。
激光扫描仪一般是稳定运行的,但在恶劣天气条件下灵敏度会有所下降。这个事实限制了它们的可用性和可靠性。最常见的激光扫描仪提供距离和方位信息允许 1-10cm 10-50m的范围内的顺序分度的分辨率和精度。
激光扫描仪可用于检测其他车辆或道路场景障碍和弱势道路使用者:如行人和自行车等。此外,车辆可通过激光扫描仪对道路的边界进行检测。
相比雷达传感器,激光扫描仪显示出好很多的横向分辨率,但是它们具有相对高的扫描重复率、相对大的物理尺寸以及相对较高的生产成本。他们也会显著地受到天气条件的影响。不同供货商生产的激光扫描仪规范不同。表3列出激光的规格。
基于纵向和横向的激光的扫描仪的车辆控制应用都是存在的,但它们仅存在于昂贵的车辆上。目前,这些传感器的市场占有率较低,发展速度慢。
在欧洲的一些项目中可以发现这样的示例应用程序,例如PReVENT与SAFESPOT。还有一个叫MINIFAROS的欧洲项目,目标是开发一种微型激光扫描仪,产品将会是相当的物美价廉,将会比现有的激光扫描仪拥有更大的市场占有率与更快的市场渗透速度。
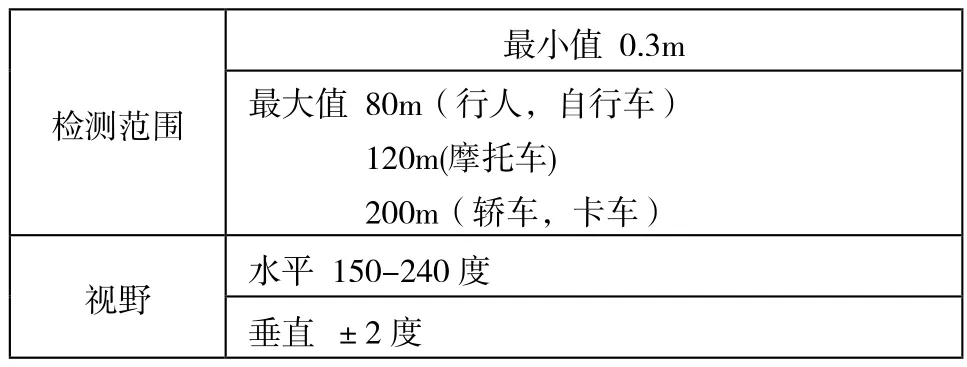
表3 激光的规格
2.2.3 视觉系统
车辆应用程序领域的新兴技术中,车辆视觉系统是其中一个重要的组成部分。事实上,视频和视觉处理已经成为被部署在车辆上的技术中占有量增长最快的技术。
这一类别包括了各种不同的视觉系统和支持功能。这些功能的范围可以从车道识别到交通标志识别对象检测(行人,车辆等)。在汽车领域应用的视觉系统可分类为:
电荷耦合器件(CCD)传感器
互补金属氧化物半导体(CMOS)传感器
红外传感器
立体电视系统
CCD和CMOS视觉系统:
CCD视觉系统是最常见的一种图像传感器。用CCD,光被每一个光电二极管传感器所捕捉。该撞击传感器的光子被转换为相等数目的存储在各个传感器的位置的电子。接下来这些电子被电子阅读器读到后离开电荷转移寄存器。一旦离开CCD阵列,它们被转换为它们的相对数字值。
在数码照相领域的其他类型的视觉传感器叫做 CMOS传感器。CMOS和CCD传感器都是由硅构成。它们具有在可见光和近红外光谱相似的光灵敏度。在最基本的层面上,都将入射光通过同一光电转换过程转换为电子的电荷。
CCD传感器创造高品质,低噪声的图像,而CMOS传感器更容易受到噪音。然而,在过去的几年中,CMOS传感器不再以信噪比下降作为分辨率的增加的代价,这些限制已被充分地克服。此外,CMOS芯片的光灵敏度较低且CMOS传感器消耗很少的功率但是在另一方面的CCD消耗更多的功率。芯片级的成本他们二者是相似的。CMOS摄像头可能需要更少的组件和较少的功率,但是它们也可能需要后处理电路,以补偿较低的图像质量。
红外视觉系统:
可见光的频率由400nm(紫色/蓝色)至700nm(红色),波长700纳米以上到高达约30mm(=30000nm)的光被称为红外线。红外线波长区域被分成近红外 NIR(0.7-1.2mm),中波红外(MWIR)(3-5mm),和长波红外(LWIR)(8-12mm)。传感器在近红外辐射区域的工作都是基于近红外光子探测反射的物体,而中波和长波红外探测器探测这是由一个对象从它的起源热发射的热光子。
立体电视系统:
立体视觉是一种可以获得在汽车的安全系统中使用的距离信息的图像的技术。从对应于左和右图像像素与摄像机配置的参数中,可以计算出与一个被观看的 3D对象之间的距离。为障碍物检测相对高度的立体图像的点是基于他们的距离进行计算的。使用障碍物的立体视觉检测跟踪可以被完成。
典型的视觉系统的性能:
首先要明确,范围和距离变化率,不能由普通的CCD或CMOS视觉系统直接测量。它们提供了基本的角度测量与由透镜所确定的分辨率和像素数(通常为VGA640×480)。该单个图像的角度精度约等于角分辨率,例如:VAG水平线≈50度/640≈0.1度。精度是由透镜的质量和所施加的误差校正/补偿方法的进一步确定。
估算方法的对象的范围,是基于使用光流的不同的图像的视角或单成像技术图像视差的立体成像技术。然而,精度范围远不如雷达和激光扫描仪。由于这个原因,许多ADAS功能常被认为是难以与视觉系统和一个融合了雷达和激光扫描仪系统同时工作的。于激光扫描器相同,范围率也不能直接测量,并以跟踪来估计。
被动视觉系统的目标探测性能在很大程度上取决于光照和能见度条件。对活跃可是系统来说,辐射度将取决于对象的反射率,纵横角度等。
视觉系统的主要优点是它们提供边缘能力,扩展和定型对象能力,以及基于对象进行分类的巨大潜力,例如,关于形状和表面纹理的认可。然而,分类性能依赖对象和情景。
2.2.4 超声波传感器
超声波技术是基于声波的传输用于提取有关环境的提取信息。实际上,超声波传感器发送的高频率(频率高于正常的听力)的声波并接收其回声。然后,它计算在发送信号和接收所述回波来确定到物体的距离之间的时间间隔。相比其他测距传感器超声波传感器流行是因为它们的成本低,重量轻,功耗低,以及较低的计算工作量。由于上述的原因,这种传感器在汽车市场中相比其他环境感知系统具有最好的占有率,并可以在几乎所有类型的车辆中找到。由于它们的超短范围(几米),它们主要用于停车辅助的应用程序。
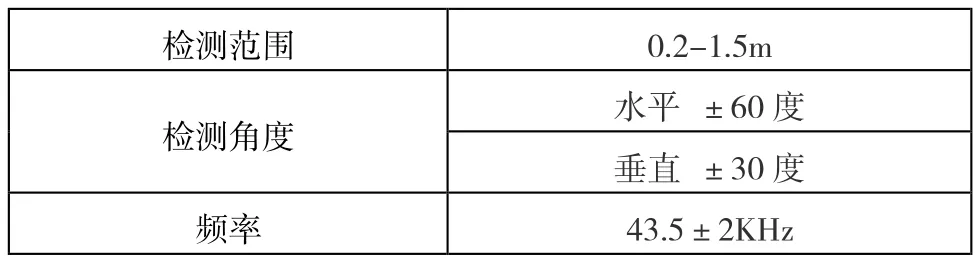
表4 超声波传感器规范
在不久的将来,我们可以预见到,超声波传感器系统将被主要用在更便宜的车上,而豪华车都将配备如雷达,激光雷达、摄像头等先进传感器。
关于超声波传感器的规格由表4中给出(这些是指示值,并可能有不同的供应商之间的替代解决方案)。
2.3 虚拟传感器
术语“虚拟”传感器用于一个不由真实传感器所采集的信息源,但这些信息源是智能汽车应用中的一个重要输入。这一类传感器中最重要的代表是数字地图以及在下面进一步分析的无线通信。
2.3.1 数字地图
在汽车应用中使用的标准的数字地图主要包含道路几何信息在内的相关属性,核心由链路和节点连接在一起形成路网的道路中心线。对链路的形状来说,如果它不是一条直线,则可通过一个或一个以上的形状点,在链路的起点和终点节点之间的中间点来表示。因为它是大体上的指示,因此描述该路段的形状点没有放置在等距间隔。
所有的地图属性都参考链接、节点和形状点。这些属性可以是兴趣点(POI)、交通标志、速度限制点等。此外,地图可以进一步通过增加如道路的类型、车道数、车道宽度、以及其需要更复杂应用中的车道标线等属性来增强。
当定位信息可用时,数字地图数据可以被汽车所提取并使用。假设与GPS卫星失去连接,基于GPS技术并且结合惯性传感器例如陀螺仪和里程表的标准地图定位技术仍然可以继续使用(Lytrivis et al.2009a)[2]。
对于高级车辆应用,特别是对合作系统,本地动态地图(LDM)的用途更广(Zott et al. 2008; ETSI 2009)[3]。LDM实际上是一个地图数据库,其中包括信息四个不同的层次(见图1)。虽然将LDM从底部移动到顶层,但是静态信息与动态信息加强了联系。
2.3.2 无线通信
由于感知传感器如局限于视野范围等的物理限制,或者由于其它重要参数在范围上或感兴趣区域上的有限性,如由恶劣的天气条件所导致的性能劣化,可以通过检查无线通信来弥补甚至取代这些传感器,提高驾驶员的意识。车载环境下可以使用两种类型的通信:车辆到车辆(V2V)和车辆到基础设施(V2I)。
3、基于车载的移动智慧云端信息平台的开发
疲劳驾驶(driving fatigue)是机动车驾驶员在长途连续行车过程中产生的生理、心理机能衰退以及反应水平和操控效率下降的行为,同时驾驶疲劳也是高速公路上引起货运汽车车祸的重要原因[4]。通过道路的视频图像获取行车偏移信息是一种非接触、简便、可靠的方法,作为车载安全辅助系统之一已经获得人们广泛接受和认可[5]。在华东理工大学的大学生创新创业训练计划创新训练活动中,国家级项目基于车载的移动智慧云端信息平台的开发就是运用上文提到的若干传感器建立一个辅助驾驶系统。此系统通过各类传感器收集车内车外信息打包上传至云端,云端可以时时检测车辆运行状态、道路情况、驾驶员健康状况。下文将把此系统分为车载端与云端进一步介绍。
3.1 车载端
车载端的主要功能是对车辆基本信息进行采集处理并发送,以及通过道路偏移算法分析车前摄像头采集的道路信息,作出车道偏移的判断及预警。系统示意图由图 1.2给出。车载端通过前置摄像头捕捉车辆运行过程中的道路偏移情况,发现偏移时将会及时警示驾驶者,位于车前的激光传感器会时时捕捉车与障碍物的距离。同时,驾驶员佩戴的手环会时时监测驾驶员的心率。这些信息会定时上传至云端,以便日后分析。下文将对汽车端搭载的道路偏移预警算法进行简要的分析,同时对本系统所用到的各个传感器进行简要介绍。
3.1.1 车道偏移检测和预警系统简介
本系统的输入是连续地车道视频,输出的是连续的偏离判断视频。
标定模块,主要包括 “定义初始感兴趣区域”、“标定车道标准线”:定义感兴趣区域,选定车道图像中需要进行处理分析的区域作为感兴趣区域,对于得到结果的准确性和算法的执行效率有很大的提升;标定车道标准线:在图像的感兴趣区域内,设定车道线的标准线,作为之后预警系统中与实际车道线的比较。
车道处理模块:主要包括:“图像预处理模块”、“检测车道边缘线模块”以及“求出车道线方程模块”:图像预处理:提取视频中的每一帧图像,对图像使用算法进行预处理工作,提取出车道线的边缘特征;检测车道边缘线,对上一步图像预处理得到的车道线边缘特征,通过使用Hough算法处理得到实际车道边缘线,并将得到的边缘线参数存储到数组中;求出车道线方程,将得到的边缘线根据参数求出直线方程,从而得出每一条边缘线的具体直线信息,以进行接下来比较预警处理。
预警处理模块:主要包括“比较实际车道线和车道标准线模块”、“偏移结果判断模块”以及“可视化结果输出模块”。比较实际车道线和标准车道线,在标定模块得出标注车道线信息,在车道处理模块得到实际车道线信息,使用算法比较这两条车道线的信息,得出车道偏移的结果;偏移结果判断,得出偏移结果之后,进行结果的分析,判断是否需要预警以及需要预警的程度;可视化结果输出,将预警信息可视化输出并显示在界面上。
为使读者更清楚明了特绘制本系统工作流程图,如图 3所示。
3.1.2 系统中用到的传感器介绍
在本系统中使用的传感器分为三大类:一类是车外信息传感器,主要包括距离传感器、温湿度传感器、光照强度传感器;一类是车内信息传感器,主要包括温湿度传感器、光照强度传感器;还有一类是司机健康信息传感器,主要包括心率、脉搏传感器。下面介绍每个传感器的详细信息。
车载CCD摄像装置:按需要定时为系统输入道路图像,供系统分析。
LS-60串口激光测距仪:用于测量车辆与障碍物之间的距离。
DH-11温湿度传感器:用于车辆车外温度与湿度,供司机查看。
PulseSensor脉搏心率感应器:用于测量驾驶员脉搏心律,危急时刻用于提醒司机。
3.2 云端
端的主要功能是对收到的信息进行时时分析,直观显示车辆的地理位置、车速、车内外环境信息、车辆行驶状态、驾驶员生理特征等。提供具体车辆的查询服务,并提供基于百度云的推送服务。并且绘制热力图、分布图等为统计学分析提供信息支持。云端界面如图4所示。
4、结论
到2020年以前,联合国计划通过激励智能交通的发展将由道路交通事故造成的死亡人数降低50%。另外,由于技术的发展使得车载系统的价格不断降低并且开发难度也日益下降。因此,越来越多的用于感知环境和提高的情况驾驶员意识的智能车载应用正在被开发。传感器的价格越来越大众化,并且通过集成使得传感器朝着更先进发展。
未来,我们可能会进入一个汽车可以自动驾驶的时代,在这个时代不管是司机还是乘客在出行时都会更加舒适,道路也许不再拥堵,出行一定会更加安全。但对目前来说,这个领域还有相当长的路要走。
[1] Marek J et al (2003) Sensors for automotive applications.(Sensors Applications Vol 4). Wiley,Weinheim.
[2] Lytrivis P, Thomaidis G, Amditis A (2009a) Sensor data fusion in automotive applications. In: Nada Milisavljevic Ir (ed) Sensor and data fusion. I-Tech Education and Publishing KG, Vienna, Austria, pp 133–150. ISBN: 978-3-902613-52-3.
[3] Zott C, Yuen SY, Brown C, Bartels C, Papp Z, Netten B (2008) SAFESPOT local dynamic maps –context-dependent view generation of a platform’s state & environment. In: 15th World Congress on ITS 2008,New York,November 2008.
[4] U.S.Department of Transportation.Research and Special Programs Administration, et al.Commercial Transportation Operator Fatigue Management Reference[R].July 2003.
[5] S.Lee,W.Kwon,J.W.Lee,A Vision Bassed Lane Departure Warming System[A].IEEE/SRJ Internation Conference on Intelligent Robots Proc.IEEE Symposium on Intelligent Vehicles.USA.1995:506-511.
Research on sensor of intelligent vehicle information collection system
Xu Shuo, Kuang Yun
(East China University, Shanghai 200030)
Today, vehicles are equipped with hundreds of miniature sensing systems.This paper will highlight now or the future of the sensor is installed in the car.The purpose of this chapter is to give an overview of these systems and do not go deep into detail about the different technologies behind such systems.Finally, this paper will briefly a East China University of Science and Technology student innovation project:The development of Mobile Smart cloud platform based on the information of vehicle.In this project.They developed a set of auxiliary driving system.Finally, this paper introduces the working principle of will, lane departure warning system algorithm process, and all kinds of sensors used in the function of the system.
The intelligent car; Vehicle sensor; Lane Departure Warning System
U463.6
A
1671-7988(2015)05-58-06
徐硕,本科在读,华东理工大学。
