基于dq坐标变换的单相逆变器控制技术研究
2015-07-11邓长吉刘向立胡永华王攀攀
邓长吉,刘向立,胡永华,王攀攀
(许继电源有限公司,河南许昌461000)
目前,新能源越来越受到关注,但是大部分新能源发出的电的频率和电压不稳定,不能直接并入电网或直接给负载供电。因此,逆变器控制技术是更好使用新能源发电的一项重要部分。逆变器的控制技术主要有:无差拍控制、重复控制、滞环电流控制、准比例谐振(proportional resonant,PR)控制和比例积分(proportional Integral,PI)控制等。PI控制器具有结构简单、容易实现、理论成熟的优点,是应用最为广泛的控制器[1],由于其对非直流给定信号不能实现无差跟随并且对于周期干扰信号不能实现无差抗扰动,从而导致输出稳态精度受到影响。本文将研究通过坐标变换的方法,将单相交流量变换为直流量,然后再采用PI 控制,以消除稳态误差,提高抗干扰能力,得到高质量的单相交流电给负载供电。
1 单相dq坐标变换
在三相对称的逆变系统中,经过同步旋转坐标变换,三相静止坐标系中的正弦波信号被变换为同步坐标系中的直流信号。而对于单相逆变器,由于只有一个交流量,因此不能直接进行坐标变换,但是可以通过增加一个与相应的物理量垂直的虚拟变量来构建两相静止坐标系,从而同样可以通过坐标变换将静止坐标系下的正弦信号变换成同步旋转坐标系下的直流信号。这样就可以使用PI调节器控制,实现直流给定信号的无静差控制,达到理想的控制效果。
1.1 交流变量由静止坐标系变换到旋转坐标系
单相坐标变换中静止坐标系到旋转坐标系αβ/dq坐标变换公式如下:

其中

式中:Ud为旋转坐标系中d轴的分量;Uq为旋转坐标系中q轴的分量;θ为相位角。
1.2 交流变量由旋转坐标系变换到静止坐标系
单相坐标变换中旋转坐标系到静止坐标系dq/αβ坐标变换公式如下所示:
其中

根据dq/αβ变换公式,可以将通过PI 调节后得到的直流量Ud,Uq变为交流量Uβ,Uα,由于Uβ是由Uα延迟四分之一个输出电压周期得到,因此,只使用Uα作为调制波。
2 单相逆变器建模与解耦控制
单相逆变器中开关管的周期性开通和关断,使其运行状态具有不连续性和非线性。为了得到dq 坐标系下的模型,需要先建立其平均模型。在逆变器的开关频率远远高于输出基波的频率时,可以采用平均模型的方法建立实际电路与正交虚拟电路的模型。依据式(1)和单相逆变器的平均状态方程,得出系统在dq坐标系下的状态方程为

根据上述状态方程可得如图1所示的单相逆变器在dq 坐标系下的电路模型。在dq 坐标系下,系统输出电流Id和Iq除受控制量ddUCf和dqUCf的影响外,还受耦合电压ωLId和ωLIq扰动以及输出电压Ud和Uq扰动的影响。同理,系统输出电压Ud和Uq除受逆变器输出电流Id和Iq控制外,还受耦合电流ωCUq和ωCUd以及输出负载电流IdR和IqR的扰动影响。

图1 单相逆变器dq模型Fig.1 Single phase inverter dq-model
对单相逆变器进行输出电压和负载电流前馈解耦,可得如下公式:

电压外环的输出为电流内环的给定,由于电压外环采用PI控制器,则根据单相逆变器在dq坐标系中的模型方程式(4),可以得到下面的电压控制方程:

式中:Kvp,KvI分别为电压外环PI 控制器的比例系数与积分系数;为电压外环的给定值。
将式(5)~式(8)代入式(3)、式(4)后,d轴和q轴之间的变量解除了耦合关系,系统的解耦控制框图如图2所示。

图2 单相逆变器解耦控制框图Fig.2 The decoupling control block diagram of the single phase inverter
前馈解耦之后,d轴和q轴上的控制结构完全一致,2 个坐标轴上的控制器参数一致,所以取d轴上的量进行设计,根据单相逆变器在dq坐标系下的数学模型,得到如图3 所示的双闭环控制框图。其中KPWM=Udc是增益。

图3 单相逆变器双闭环控制框图Fig.3 Double-loop controller structure of the single phase inverter
3 控制器软件程序设计
本设计采样STM32F407IG 单片机作为控制器,STM32F407IG系统时钟和定时器的最高输入时钟可达168 MHz,配合时基单元的预分频功能可提供灵活的时钟周期[2],很好地满足实时性控制要求,能使用C 语言进行编程。图4 为单相逆变器控制器中断子程序流程图。

图4 单相逆变器控制器流程图Fig.4 The control flow chart of the single phase inverter
4 实验结果
为了验证以上设计,选用的参数为:额定输出功率Pe=10 kW,额定输出电压Ue=220 V,额定输出频率ƒ=50 Hz,输出滤波电容C=15 μF,输出滤波电感L=3 mH,开关频率ƒPWM=20 kHz。搭建了一台容量为10 kW的样机进行实验验证。
采用工程设计法[7]计算得到电压外环PI 参数:Kp_ud=Kp_uq=1’Ki_ud=Ki_uq=10.6。电流内环P参数:Kp_id=Kp_iq=15.3。
测得输出侧稳态电压波形,突加负载和突减负载时的实验波形。实验条件如下:直流母线电压Udc=540 V,交流侧输出额定电压有效值Uo=220V,电压频率f=50 Hz,逆变器开关频率为20 kHz,滤波电感L=3 mH,滤波电容C=15 μF,负载为纯阻性负载。
图5为额定负载时输出的电压和电流实验波形。由示波器截取的波形可以得出采用dq 坐标变换控制得到的单相交流电压正弦度较好,能满足要求。
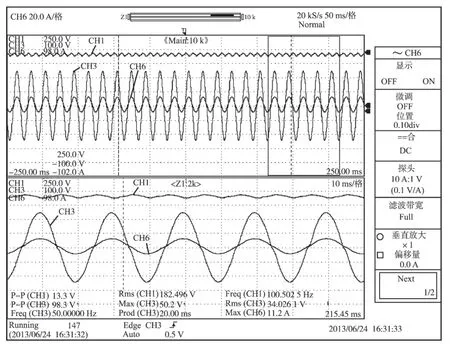
图5 额定负载时输出电压和电流Fig.5 Output voltage and current of rated load
图6和图7为突加和突减负载时电压电流波形。由图可知单相逆变器在dq坐标变换控制方式下,系统受到扰动时,具有强的稳定性及抗干扰性。

图6 突加负载时电压和电流Fig.6 Output voltage and current of sudden load

图7 突减负载时电压和电流Fig.7 Output voltage and current of sudden load reduction
5 结论
本文针对单相交流逆变器给定信号是周期性变化的特点,采用dq 坐标变换的方法,将交流给定信号变为直流给定信号,采用结构简单、容易实现、理论成熟的PI 控制器,实现对给定信号的无差跟随并实现无差抗扰动。通过分析10 kW逆变器样机的结果,验证了dq坐标变换方法在单相逆变器控制中的优点,验证了采用坐标变换设计的单相逆变器输出电压正弦度较好,系统抗扰动性好以及能实现无静差跟踪,效果比较理想。
[1]Teodorescu R,Blaabjerg F,Borup U,et al. A New Control Structure for Grid-connected LCL PV Inverters with Zero Steady-state Error and Selective Harmonic Compensation[C]//Applied Power Electronics Conference and Exposition,2004,APEC2004,19th Annual IEEE,2004:580-586.
[2]胡兴柳,彭小兵,穆新华.SPWM逆变电源的单极性控制方式实现[J].机电工程,2004,1(21):38-41.
[3]Mohamed Y R,Saadang E F. A Deadbeat Current Control Scheme with a Novel Self-tuning Load Model for a Threephase PWM Voltage-source Inverter[J]. IEEE Transactions on Industrial Electronics,2007,54(2):747-759.
[4]宋建成,刘国瑞,李永学.基于状态反馈与重复控制的逆变器控制技术[J].中国电机工程学报,2006,26(10):56-62.
[5]顾和荣,杨子龙,邬伟扬.并网逆变器输出电流滞环跟踪控制技术研究[J].中国电机工程学报,2006,26(9):108-112.
[6]张承慧,叶颖,陈阿莲,等.基于输出电流控制的光伏并网逆变电源[J]电工技术学报,2007,22(8):41-45.
[7]陈良亮,肖岚,严仰光.双闭环控制电压源逆变器外特性研究[J].电力电子技术,2004,38(3):6-7.
[8]张兴.高等电力电子技术[M].北京:机械工业出版社,2011.
[9]胡寿松.自动控制原理[M].北京:科学出版社,2007.
[10]张兴,张崇巍.PWM 整流器及其控制[M].北京:机械工业出版社,2012.