基于OV7962的车载全景摄像头设计
2015-07-05张宝龙李丹郭艳艳郭海成
张宝龙,李丹,郭艳艳,郭海成
基于OV7962的车载全景摄像头设计
张宝龙1*,李丹1,郭艳艳1,郭海成2
(1.天津科技大学电子信息与自动化学院,天津300222; 2.香港科技大学显示技术研究中心,香港九龙)
为了实现车载摄像头的超广角成像,解决倒车影像系统不能全面照顾周围视角的问题,设计了一款超广角车载摄像头。对该摄像头所采用的图像传感器、超广角成像技术、硬件电路设计及接口EMC防护的应用进行研究。根据当前车厂对摄像头的要求选择了基于美国Omnivision公司的CMOS图像传感器OV7962作为成像芯片。采用一种新的凝视型视场全景成像技术——鱼眼透镜成像,并通过匹配成像芯片的参数计算出镜头的焦距和分辨率。对摄像头硬件电路的设计及接口电磁兼容性(EMC)防护进行测试和改进。实验结果表明:摄像头可实现210°超广角成像,接口EMC防护已通过ISO-7637-2脉冲5b标准测试。满足了对倒车影像系统全面顾及周围视角的要求,另外该车载全景摄像头还具有成本低、性能稳定、分辨率高、夜视效果好等优势。
鱼眼透镜成像;超广角;CMOS图像传感器;电磁兼容性
1 引言
随着人们对行车安全意识的不断提高,车载辅助视觉系统在汽车电子领域得到快速发展,它能为驾乘人员提供车厢外环境的实时监控,为安全行驶提供保障,成了交通安全必不可少的设备之一[1-2]。摄像头是车载辅助系统的主要部分,而普通摄像头由于视角小、分辨率低已不能满足全景泊车、夜视辅助、倒车影像等车载辅助视觉系统对摄像头的要求。为了避免行车过程中的视觉盲区,大视角成为当今车载摄像头面临的首要问题,为了获得更广的视角往往采用多镜头拼接或者采用旋转云台的方法来实现,但往往存在盲区和成本过高等缺点。其次,为了能够采集到行车细节及路况,高分辨率、高清晰度也同样需要考虑。因此设计了一款视角可达210°的超广角摄像头,可实现无盲区实时拍摄。摄像头图像分辨率为640×480,可满足车载摄像头对成像细节的要求。相比普通的车载广角摄像头视角大多在120°,视角好价格昂贵的也只能达到180°左右的市场状况而言,本文在考虑硬件成本的前提下所设计的210°超广角摄像头在业内非常具有竞争力。
下文将在成像芯片的选择、鱼眼镜头参数的计算、硬件电路设计以及接口处电磁兼容性防护等方面做详细的阐述。
2 成像芯片的选择
目前,车用视讯装置已变得日益流行,激烈的市场竞争使汽车制造商要求较高的成像质量的同时在不断降低生产成本,成像芯片是硬件成本的主要部分,因此成像芯片的选型非常重要。考虑到汽车在白天和夜晚都需要行驶,所以摄像头的夜间拍摄效果也是影响摄像头性能指标的重要因素,因此要求感光芯片要有很好的微光效能,使其在极低照度环境中无需任何补光设备也可呈现出清晰生动的画面。再者,为了保持车身整体的美观性还要求摄像头尺寸要尽量小,这就要求感光芯片的封装尽可能小。
综合以上特点,本设计采用Omnivision公司的CMOS图像传感器——OV7962作为成像芯片。OV7962沿袭了CMOS图像传感器较高的集成度和较低的整体用料成本,其效能可超越同性能的CCD图像传感器[3-4]。它还能提供杰出的微光效能(<0.01/lx),即使在最具挑战性的照明条件下,也可获得具有良好分辨率的彩色图像。芯片采用aCSP封装形式,与同类竞争的CMOS装置相比体积可减小至50%,能够很好地缩小印制电路板的尺寸。工作温度范围从-40~105℃,符合AEC-Q100第2级的要求。
3 成像镜头参数的计算
3.1鱼眼镜头
鱼眼镜头,是依据仿生学原理而设计的一种焦距很短但视角很大的超广角镜头[5-6]。本设计选用的鱼眼镜头采用非球面镜片结构由1片玻璃和3片塑胶镜片组成,如图1左图所示。这种结构减少了传统球面镜鱼眼镜头需用的球面镜面数量,在保证畸变量的同时还能保证较好的成像质量。

图1 鱼眼镜头结构及具体外形Fig.1 Fisheye lens structure and shape
在光学设计中镜头要把图像信息成像到感光芯片上,所以镜头和感光芯片的匹配直接影响最终的成像质量。因此需要根据所选图像传感器的参数来确定镜头的设计规格。
3.2镜头焦距确定
普通镜头遵循“相似成像”的物像相似原则,只需镜头成像公式就可以精确计算出镜头焦距,然而鱼眼镜头由于其超大的视角已超过了一般应用光学的讨论范围破坏了物空间和像空间的约定,因此传统的高斯光学不在适用,这时需要通过压缩变形的方法使其“非相似”成像,从光学角度上是通过对其引入一定量的桶形畸变实现的[5]。目前,业内公认的鱼眼镜头数学模型有4类公式如下:
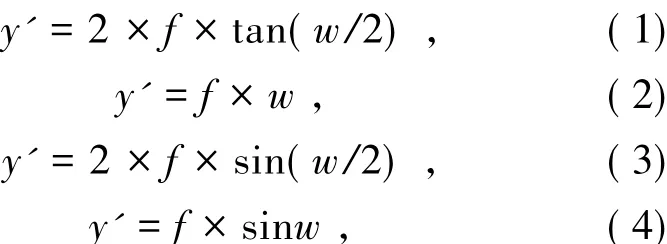
其中:y’为理想像高,f为物方焦距,w为物方半视场角。综合考虑图像细节的显示和有用信息的压缩程度并结合4类公式的特点,本文采用体视成像模型,如公式(1)所示。把像高代入成像公式得到f为0.77 mm。在此基础上系统允许存在一定程度的负畸变,镜头畸变值最大允许在-20%左右,据此计算镜头焦距应该在0.97 mm左右。
3.3镜头分辨率
镜头的分辨率是指镜头所能分辨每毫米内包含黑白相间的线对个数的能力。同一镜头分辨率越高,其识别线对密度的能力越强,从图2可以看出,线对密度较低时黑白线之间过渡带很小不会影响图像质量,而当线对密度达到一定程度后黑白线之间的过渡带会逐步增大甚至分辨不清,所以为了提升图像细节解析就要尽可能的提升镜头的分辨率。
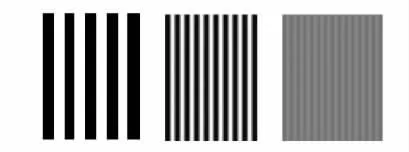
图2 同一镜头拍摄不同的线对密度Fig.2Different line density was shot by same lens
然而镜头的分辨率是不能无限增大的,当达到一定程度后,成像元件对镜头分辨率的敏感程度会迅速下降,因此在镜头参数设计时需选择镜头最大分辨率,其公式如下:

其中:fmax为最大分辨率,pixel为CMOS图像传感器的像素大小。感光芯片OV7962像素大小为6 μm×6 μm,根据公式(5)可得fmax为833 p/mm,然而一般镜头达到其最大分辨率的70%即可满足成像条件,因此这里fmax取值为60 lp/mm。
根据上述计算得到了鱼眼镜头的具体参数,如表1所示。从中可看出这款鱼眼镜头还具有优越的视场范围,较小的光圈系数以及较宽的工作温度范围,能很好的适应汽车环境,其物理形状如图1右图所示。
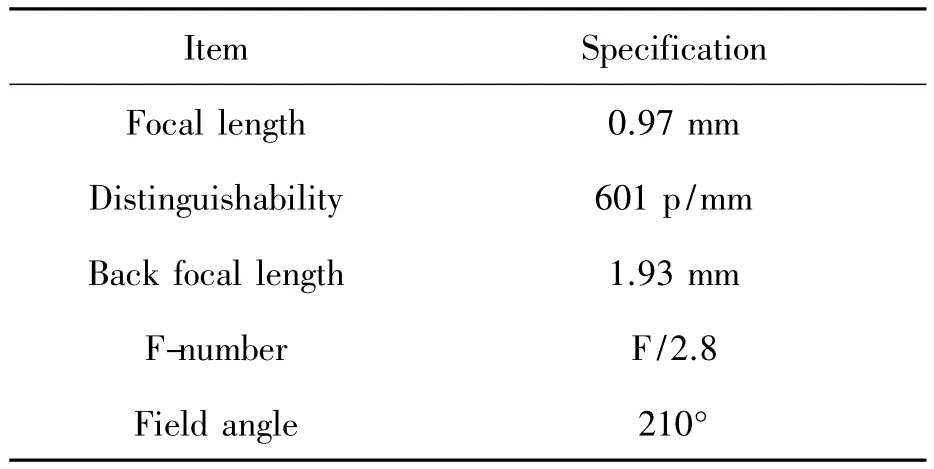
表1 鱼眼镜头设计参数Tab.1Design parameters of fish-eye lens
4 摄像头硬件电路设计
4.1硬件电路
摄像头硬件电路主要包括视频处理模块、存储模块、电源模块和调试模块等部分,基本硬件框图如图3(a)所示。图3(b)为OV7962外围配置电路设计方案,OV7962输出NTSC视频制式时所需晶振频率为24.545 454 MHz,原理图顶部为上下拉电阻配置电路用于配置OV7962的工作模式,左侧为一些参考电压输出,通过测试OV7962的四路参考电压可得知图像传感器是否处在正常的工作状态,此外,通过调节R24的阻值可改变输出视频信号的幅值,在画面质量上表现为图像曝光程度的不同。
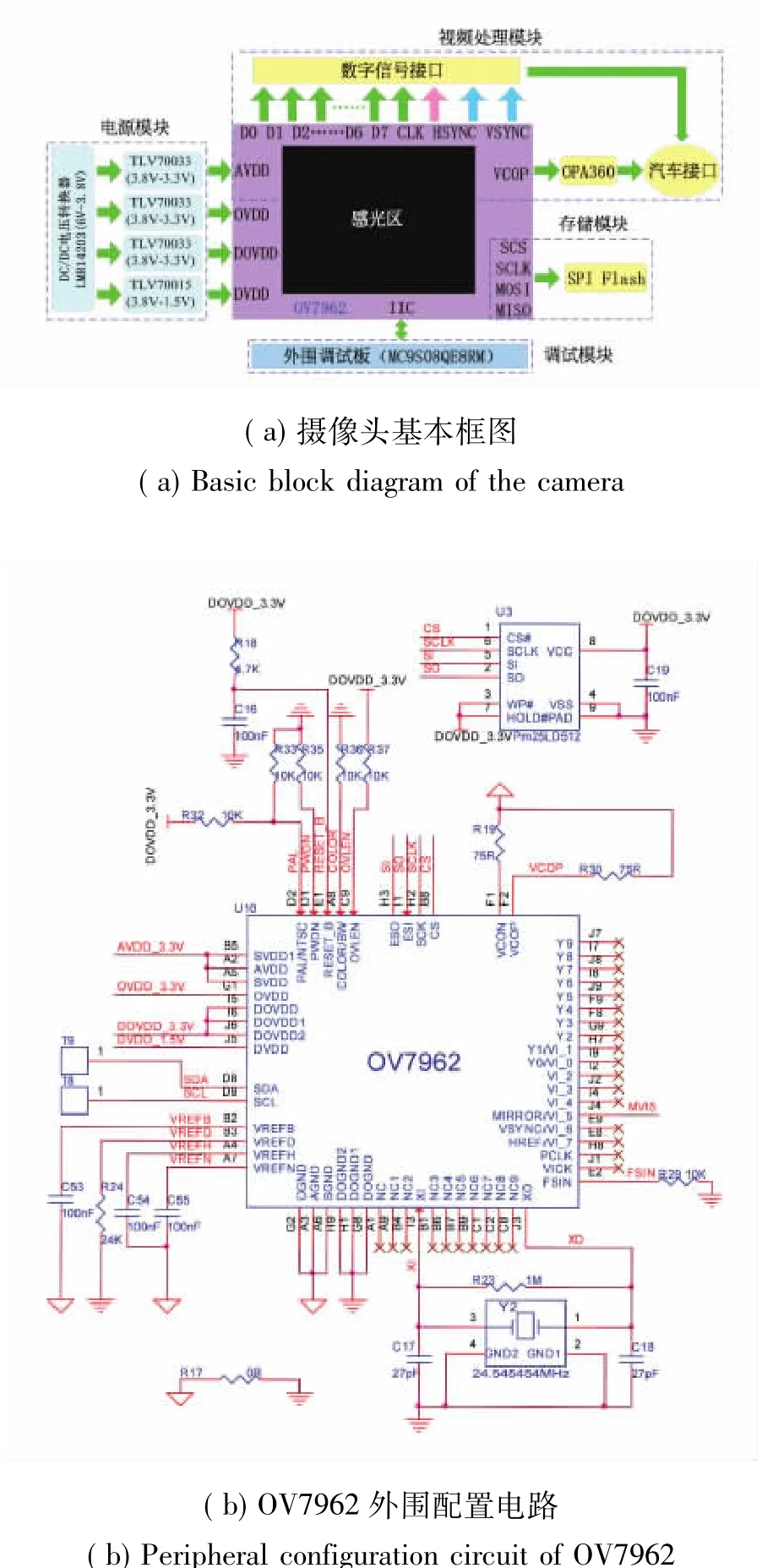
图3 摄像头基本框图和OV7962配置电路Fig.3Basic block diagram and peripheral configuration circuit of OV7962
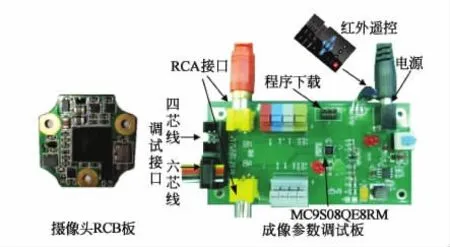
图4 摄像头硬件电路板和调试平台Fig.4Hardware board and debugging platform of camera
摄像头最终的硬件电路板如图4左图所示,调试模块如图4右图所示。调试板接口与摄像头接口相连,四芯线接口用于摄像头稳定性测试;六芯线接口用于图像传感器内部寄存器的参数调节,中间两根为IIC总线SDA和SCL。MC9S08QE8RM单片机通过IIC总线与OV7962通信,通过调节OV7962内部寄存器的值来改变图像传感器的成像效果以满足不同应用环境下对图像质量的要求。OV7962输出的CVBS视频信号通过RCA接口输出到显示设备。红外遥控是调试板的人机交互部分,可实现复位、像素移动、彩条显示、数据读取以及程序擦除和烧写等功能。由于OV7962内置了SPI接口,所以本设计选用SPI Flash——Pm25LD512作为OV7962的参数存储器,将调试好的寄存器的值固化到Flash中,再由CMOS图像传感器提取。
4.2电源模块
电源是一个系统能够稳定运行的重要保证,特别是在对环境敏感的视频处理电路中,低噪声高纯度的电源设计是硬件电路性能提升的关键部分。在12 V汽车电子系统中汽车发动机输出端稳压二极管的钳位电压设定在50 V,依据ISO-7637-2脉冲5b测试波形,可确定整个电源系统的最大输入电压约为37 V。为了提高电源的稳定性本设计采用两级电源结构,一级电源转换采用TI的DC/DC电源转换器[7-8]——LMR14203,LMR14203具4.5~42 V的输入电压范围,最大耐压值为42 V满足车载要求。如图5(a)所示为LM14203原理图设计方案,R23和R24两个反馈电阻决定了输出电压,如公式(6)所示。

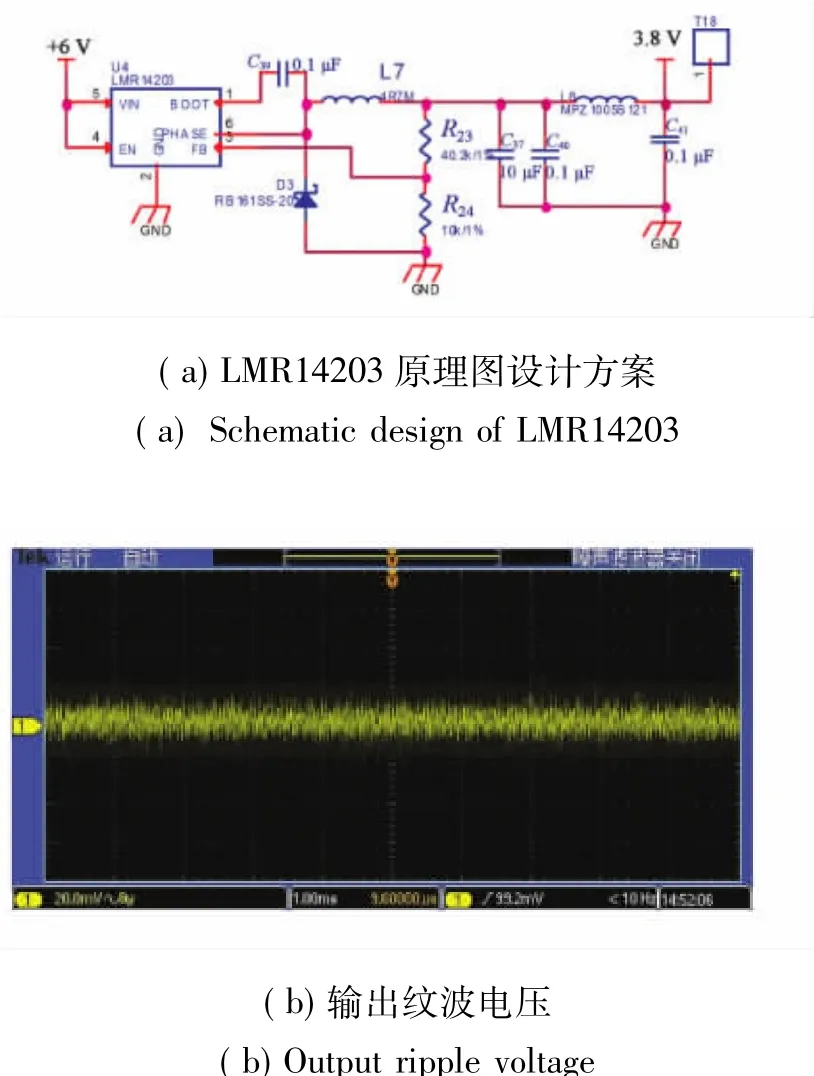
图5 电压转换原理图及输出波形Fig.5Specific schematic and output waveform

其中:Fsw=1.25 MHz是LMR14203的开关频率,Iripple为输出的纹波电流,此纹波电流值应设置为输出电流的30%。经计算最终选用TDK公司的贴片电感VLS252010ET-4R7,电感值为4.7 μH,额定电流为0.89 A,DCR为0.332 Ω。根据OV7962供电电压要求,输入电压为三路3.3 V和一路1.5 V,为了避免干扰,二级电源选用3颗TLV70033和一颗TLV70015做成四路独立电源为其供电。通过Tektronix示波器测得输出电压纹波在40 mV以内,如图5(b)所示。
4.3电磁兼容性设计(EMC)
全景摄像头的电源和信号接口直接与汽车电子主控系统相连,车内复杂的电磁环境会对摄像头电路产生一定的影响,所以EMC防护是电路设计必须考虑的问题[9-11]。电磁兼容性设计主要考虑浪涌冲击、静电和EFT防护等。
电源入口EMC防护,对车载摄像头成品针对ISO-7637-2脉冲5b标准进行电源正极瞬变脉冲传导发射测试,由于初期接口电路设计只是加入共模电感以及滤波电容进行处理,其初步测试结果如图6(a)上图所示,从中可看出电源端口的传导干扰主要集中在30 MHz以上部分,不能满足ISO-7637-2脉冲5b测试要求。针对此测试结果,对摄像头电源入口电路进行如图6(b)上图所示的改进,将原有滤波电容替换为由C3、C4、L1组成的LC-π型滤波器来滤除电源信号中的交流谐波,平滑电源波形。在LC-π型滤波器参数设计时考虑到市面上电容值与电感值相比缺乏弹性,且对于体积的影响相对电感小,应优先考虑电容参数。单就噪声抑制效果来讲电容值越大越好,但由于电容受安规限制其值不能太大,所以选择常用的10 μF。根据公式(8)可知,只要确定滤波器的截止频率F0即可得出电感L的值。其中:FB=0.765 V,R23=40.2 kΩ,R24=10 kΩ,得出输出电压约为3.8 V。
输出电感L的主要设计参数包括电感值、峰值电流和直流电阻(DCR),在满足电流驱动能力的情况下尽量选择直流电阻小的电感,电感值的计算公式如公式(7)所示:
众所周知,实际的滤波器无法达到理想滤波器那样陡峭的频率衰减曲线,特别是当辐射干扰频率很高时曲线衰减与理想值差别较大,通常将滤波器的截止频率设为30~50 kHz可有效滤除高频干扰。假设截止频率为30 kHz根据公式(8)计算得电感L值大约为10 μH,考虑到体积问题本设计最终选用TDK的叠层片式铁氧体电感——MLZ2012M100HT。改进后的摄像头测试结果如图6(a)下图所示,满足ISO-7637-2脉冲5b标准。
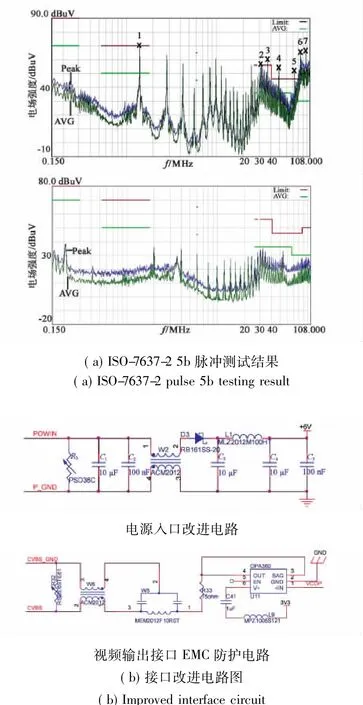
图6 EMC测试报告及改进电路Fig.6Test report of EMC and improved circuit
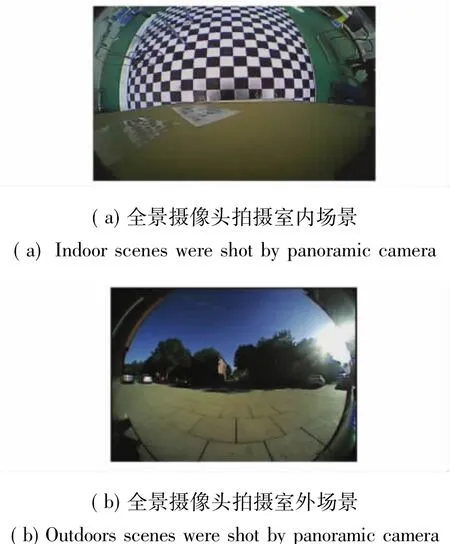
图7 摄像头拍摄的图片Fig.7Pictures were shot by camera
另外对于视频信号接口的EMC防护也是非常重要的,图6(b)下图展示了信号接口改进方案。VCOP是OV7962输出的视频信号,经过视频放大器OPA360可有效的放大信号从而提高信号的抗干扰能力。W5为三端滤波器,可有效的滤除噪声。在接口处之间加入TVS管R32,可抑制静电、雷电和电快速适应脉冲群等浪涌冲击产生的瞬间大电流保护电子器件免受损害。全景摄像头最终拍摄的室内室外的场景如图7所示。
5 结论
本设计的车载全景摄像头实现了210°的超广角成像,可在-40~105℃的环境下稳定工作,而且具有良好的防水防震性能,可靠性符合国际汽车零部件质量标准。摄像头可应用在全景泊车、倒车影像等需要大视角的场合。从最终成像结果可看出在充分考虑降低硬件成本的前提下所设计的车载全景摄像头性能优越、视角广、稳定性高。
[1]于宝龙.基于可重构的汽车全景视觉辅助系统的研究与实现[D].北京:北京交通大学,2014.
Yu B L.Research and implementation of the reconfigurable car panoramic vision system[D].Beijing:Beijing Jiaotong University,2014.(in Chinese)
[2]冷坤,沈星,胡振程.基于环视系统的车道偏离预警系统研究[J].国外电子测量技术.2012,31(12):42-44.
Leng K,Shen X,Hu Z C.Research on lane departure warning system based on surround view assistance system[J].Foreign Electronic Measurement Technology,2012,31(12):42-44.(in Chinese)
[3]苏宛新.一种高帧频CMOS图像传感器系统设计[J].液晶与显示,2013,28(6):956-962.
Su W X.Design of high frame frequency CMOS image sensor system[J].Chinese Journal of Liquid Crystals and Displays,2013,28(6):956-962.(in Chinese)
[4]张贵祥,金光,郑亮亮,等.高速多通道CCD图像数据处理与传输系统设计[J].液晶与显示,2011,26(3):397-403.
Zhang G X,Jin G,Zheng L L,et al.Desigh of high-speed and multi-channel CCD image data processing and transmission system[J].Chinese Journal of Liquid Crystals and Displays,2011,26(3):397-403.(in Chinese)
[5]陈圣聪,林峰.超短焦全景鱼眼镜头的研究与设计[J].光电工程,2012,39(2):49-52.
Chen S C,LIN F.Research and design of super short-focus panoramic fish-eye lens[J].Opto-Electronic Engineering,2012,39(2):49-52.(in Chinese)
[6]Hughes C,Denny P,Jones E.Accuracy of fish-eye lens models[J].Applied Optics,2010,49(17):3338-3347.
[7]Samavatian V,Radan A.A novel low-ripple interleaved buck-boost converter with high efficiency and low oscillation for fuel-cell applications.Electrical Power and Energy Systems,2014,63:446-454.
[8]Lee C F,Mok P K T.Monolithic current-mode CMOS DC-DC converter with on-chip current-sensing technique[J].IEEE Journal of Solid State Circuits,2004,39(1):3-14.
[9]涂杨.开关电源的EMC改善[D].广州:华南理工大学,2012.
Tu Y.Research on improving EMC of the power supply[D].Guangzhou:South China University of Technology,2012.(in Chinese)
[10]余召锋,于颖,徐鸣谦.国内外汽车电磁兼容研究发展状况[J].客车技术与研究,2007,(2):8-10.
Yu Z F,Yu Y,Xu M Q.Over view on automot ive EMC research at home and abroad[J].Bus&Coach Technology and Research,2007,2:8-10.(in Chinese)
[11]Gagern C.EMC Testing of Automotive&MilitarySystem[M].Berlin:Presentation of ROHDE&SCHWA2 RZ,2002.
Panoramic camera design for automotive applications based on OV7962
ZHANG Bao-long1*,LI Dan1,GUO Yan-yan1,KWOK Hoi-sing2
(1.College of Information and Automation,Tianjin University of Science and Technology,Tianjin 300222,China; 2.Center for Display Research,Hong Kong University of Science and Technology,Hong Kong,China)
In order to realize ultra-wide-angle image for automotive camera,an ultra-wide-angle automotive camera is designed to solve comprehensive monitoring perspective issue in reversing image system.Its applied such as image sensor and ultra-wide-angle imaging technique,hardware circuit design and the EMC protection of interface are investigated.We opted for a Omnivision-based CMOS image sensors OV7962 according to the current auto companies’requirements.The lens adoptes the new staring panoramic imaging technology—fisheye lens imaging and calculating the focal length and resolution of the lens by matching the parameters of image chip.The hardware circuit design and EMC protection of the camera are tested and improved.Experimental results indicate that the camera can achieve 210°ultra-wide-angle image and the EMC protection of interface has passed the ISO-7637-2 pulse 5b testing standard.It can satisfy the comprehensive monitoring around per-spective requirements of reversing image system.In addition,this automotive panoramic camera also has the advantages of low cost,stable performance,high resolution,as well as super night vision.
fish-eye lens imaging;ultra-wide-angle;CMOS image sensors;electro magnetic compatibility
TP212.14
A
10.3788/YJYXS20153004.0634
张宝龙(1976-),男,天津人,教授,硕士生导师,主要从事光电显示方向的研究。E-mail:eezbl@tust.edu.cn
1007-2780(2015)04-0634-07
2014-10-13;
2014-11-17.
天津市科技支撑计划资助项目(No.13ZCZDGX03000)
*通信联系人,E-mail:eezbl@tust.edu.cn
