基于BP神经网络的轮带系统的变结构控制
2015-07-01程翔张伟
程翔,张伟
(福州大学 机械工程及自动化学院,福建 福州 350108)
基于BP神经网络的轮带系统的变结构控制
程翔,张伟
(福州大学 机械工程及自动化学院,福建 福州 350108)
采用变结构离散指数趋近律设计出有效的控制律,通过控制张紧臂的状态,从而抑制轮带的横向振动。运用BP神经网络自适应调整控制律的参数,抑制了系统抖振问题。仿真结果表明,基于BP神经网络离散指数趋近律的滑模控制律有效抑制了轮带的横向振动和系统在滑模面的抖振。
轴向运动弦线;变结构控制;离散指数趋近律;BP神经网络
0 引言
轮带系统在现代自动化工业中有着很广泛的应用,如汽车发动机平带驱动系统、高楼电梯缆绳、动力传动带等,但其振动却限制了有效应用。因此有必要对其振动进行分析和控制。典型的轮带系统包含有皮带、滚轮和一个作动器。其中作动器由张紧臂和张紧轮组成,而皮带因其抗弯刚度极小,可以模型化为一轴向运动弦线。
Ulsoy首次将模态控制应用于轴向运动弦线的横向振动控制[1]。Ulsoy等[2]首次考虑了轴向运动弦线的横向振动与张紧器的耦合振动。Beikmann[3]等学者最早提出了有着两个滑轮和一个张紧装置构成的典型模型,并证明轮带系统的固有频率与速度有关,弦线的横向振动的模态与张紧臂状态有关。Fung等[4]用Galerkin方法离散控制方程,用自变模型空间控制的变结构控制方法设计轴向运动弦线系统的控制规律。Fung等[5]研究了一升降机缆绳,采用变结构控制耦合振动。
现将作动器动力学方程离散化,运用神经网络离散指数趋近律设计合适的控制器来控制张紧臂的转动角度,通过对张紧臂的控制从而间接控制弦线的横向振动,仿真验证控制方法的有效性。
1 轴向运动弦线动力学方程
轴向运动弦线的模型如图1所示,主要由一根弦线和一个作动器(张紧臂和张紧轮)组成。其中轴向运动弦线速度为c,单位密度为ρ,轴向张力为P。
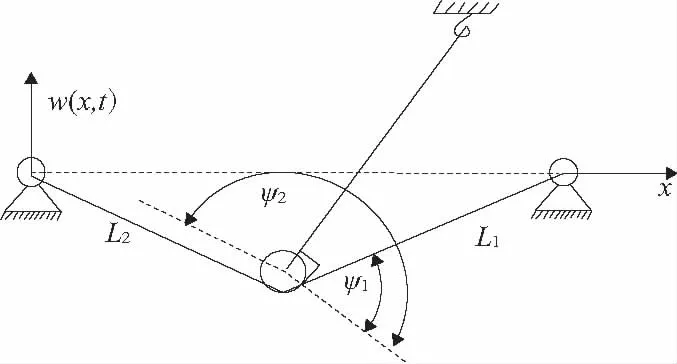
图1 轴向运动弦线模型
为简化模型,作以下假设:
1) 忽略系统各元件之间的阻尼;
2) 系统在运动中不打滑;
3) 忽略弦线的抗弯刚度。
运用Hamilton原理可推导出弦线和张紧器的动力学方程[6-7]:
(1)
边界条件为:
(2)
作动器动力学方程:
(3)
(4)
将式(4)代入弦线运动方程式(1)中,消去eiωt后可得:
(5)

解二阶复系数齐次线性微分方程[8]式(5)可得:
(6)
其中:
联立方程式(1)、式(2)、式(4)和式(6),可得弦线横向振动位移:
(7)
联立方程式(2)和式(7),则容易得到:
(8)
作动器动力学方程可化为:
(9)
其中:

(10)
2 控制器设计
变结构控制对系统摄动及外部干扰有较好的鲁棒性,且具有快速响应、无需系统在线辨识、物理实现简单等优点,是一种易于实现的综合控制方法。而随着计算机技术的高速发展和工业自动化等领域的实际需要,控制算法的实现经常采用数字计算机,但当采用数字计算机实现变结构控制算法时,由于采样过程的限制,理想的滑动模态不存在,状态轨迹以抖动形式沿着滑平面运动。因此,研究离散时间系统变结构控制方法具有重要的理论价值和实际意义。
人工神经网络具有较强的学习能力和高度的并行运算能力,能充分逼近任意复杂的非线性关系并具有较强的鲁棒性和容错性。神经网络和滑模变结构控制相结合,可以使得系统在保持对摄动和外部干扰强鲁棒性的同时尽量消除抖振。
(11)
(12)
采样周期T=0.01,方程离散化可得:

(13)

(14)
对于离散指数趋近律[9-10]:

(15)
采用3-m-1的3层BP神经网络来实现参数ε和δ的实时估计,其结构如图2所示。其中wij表示网络输入层第i个节点(i=1,2,3)到隐含层第j个节点(j=1,2,…,m)的连接权值;wj表示隐含层第j个节点到输出节点的连接权值。则网络对ε输出:
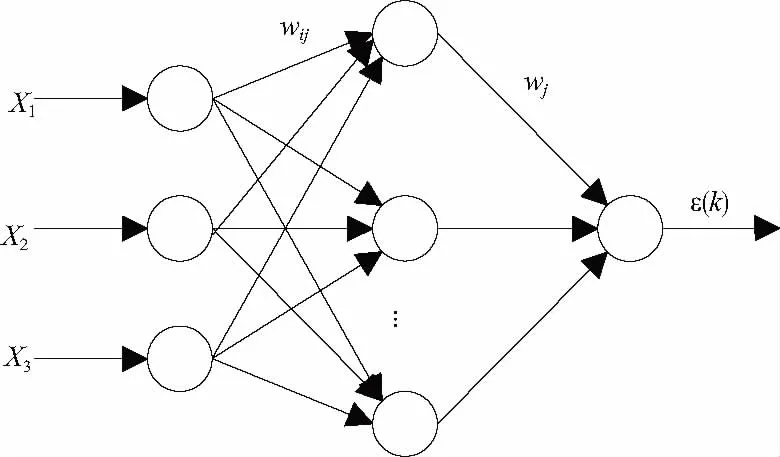
图2 神经网络结构图

则神经网络指数趋近律可表示为:

(16)
针对式(9)的离散时间系统,定义滑模切换函数:
(17)

(18)
基于神经网络指数趋近律式(15),由式(13)和式(17)可得神经网络滑模变结构控制器:

(19)
由于ε>0,0<δ<1/τ,所以网络输出层神经元激励函数取sigmoid函数。采用系统状态变量和控制变量作为网络的输入矢量,即设:
则神经网络输出分别为:
(20)
(21)

(22)
根据梯度下降法,由式(19)-式(22),可得附加动量项的权值修改公式:
(23)
其中:0<η<1为学习速率,0<α<1为动量系数。
3 数值仿真
图3中可以看出切换函数s快速趋近于0,且抖振很小,表明该控制律有效的改善了变结构控制系统的动态性能。通过比较图4与图5中未控系统和受控系统的角位
移和横向振动可知,文中的控制律有效的抑制了轴线运动弦线的横向振动。

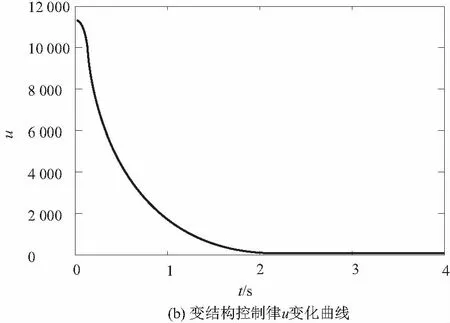
图3 变化曲线

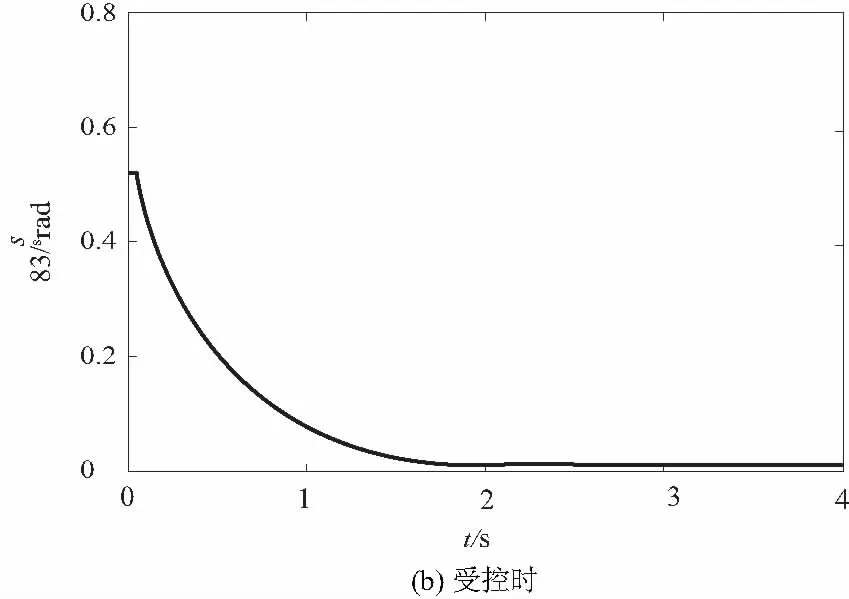
图4 张紧臂角位移变化曲线
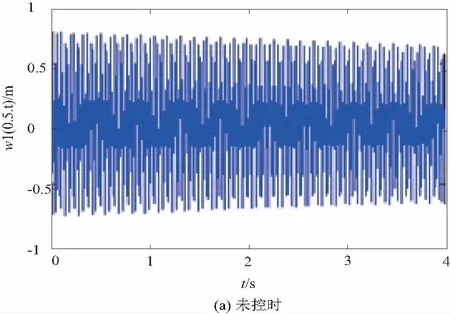
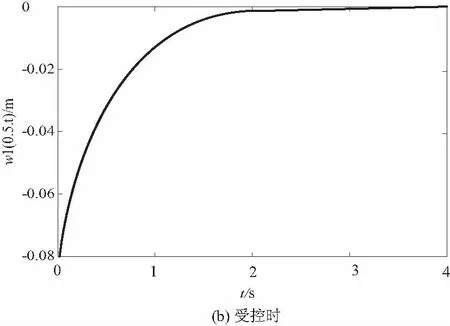
图5 x=0.5处弦线的横向振动位移
4 结语
结合轮带系统的横向振动与张紧臂角位移相耦合的动力学方程,通过神经网络控制,自适应调整离散指数趋近律参数,设计的变结构控制器有效地抑制了张紧臂角位移的变化,从而达到抑制轮带系统横向振动的目的。变结构控制系统的抖振较小,动态品质和鲁棒性能良好。文中所采用的离散方法物理上易于实现,张紧臂的角位移与角速度可通过传感器测出。仿真结果验证了控制律的有效性。
[1] A. Galip Ulsoy. Vibration Control in Rotating or Translating Elastic Systems[J]. Journal of Dynamic Systems, Measurement and control, 1984,106(1):6-14.
[2] A. G. Ulsoy,J. E. Whitesell,M. D. Hooven. Design of Belt-Tensioner Systems for Dynamic Stability[J]. Journal of Vibration and acoustics,1985, 107(3):282-290.
[3] Beikmann, R.S.Perkins, N.C. Free vibration of serpentine belt drive systems[J]. Journal of Vibration and Acoustics, 1996, 118(3):406-406.
[4] Rong-Fong Fung and Cheng-Chan Liao. Application of variable structure control in the nonlinear string system[J]. International journal of Mechanical Sciences, 1995, 37(9):985-993.
[5] Fung RF,Yao CM.Lin JH. VIBRATION ANALYSIS AND SUPPRESSION CONTROL OF AN ELEVATOR STRING ACTUATED BY A PM SYNCHRONOUS SERVO MOTOR[J]. Journal of Sound and Vibration, 1997, 206(3):399-423.
[6] Zhang L,Zu J W. Model analysis of serpentine belt drive systems[J]. Journal of Sound and Vibration,1999,222(2):259-279 .
[7] 余小刚,张伟. 轴向运动弦线横向振动的变结构控制[J]. 福州大学学报(自然科学版),2012,(2):72-75.
[8] 汤光宋,甘欣荣. 复系数复数方程的求根及复系数常微分方程的通解公式[J]. 江汉大学学报,1996,13(3):80-82.
[9] 高为炳. 离散时间系统的变结构控制[J]. 自动化学报,1995,21(2):154-160.
[10] 陈志梅,王贞艳,张井冈. 滑模变结构控制理论与应用[M]. 北京:电子工业出版社,2012.
Variable Structure Control of Belt Drive Systems via BP Neural Network Methods
CHENG Xiang,ZHANG Wei
(College of Mechanical Engineering and Automation,Fuzhou University,Fuzhou 350108,China)
in order to control the state of the tension arm, a discrete index reaching law of the variable structure is used to design an effective sliding mode control law. As a result, the transverse vibration of the belt is restrained. By using BP neural network methods, the chattering of the variable structure is controlled. Simulation results show that the chattering and the transverse vibration of the belt are well suppressed by the sliding mode control law.
axially moving string; variable structure control; discrete index reaching law; BP neural network
福州大学科研启动基金资助项目(826230);福州大学科技发展基金资助项目(826807)
程翔(1989-),男,湖北宜昌人,硕士研究生,研究方向为机械振动与控制。
O321
B
1671-5276(2015)05-0176-04
2014-03-18