电动车永磁同步电机转矩波动分析及测试
2015-06-27王斯博赵慧超李志宇王晓旭
王斯博, 赵慧超, 李志宇, 王晓旭
(中国第一汽车股份有限公司技术中心电动车部,吉林长春130011)
电动车永磁同步电机转矩波动分析及测试
王斯博, 赵慧超, 李志宇, 王晓旭
(中国第一汽车股份有限公司技术中心电动车部,吉林长春130011)
研究了电动车传动系统谐振的特点,推导了电动车传动系统谐振方程,论证了永磁同步电机转矩波动引起整车低速抖动的机理。建立了气隙谐波磁场产生转矩波动的数学模型,揭示了永磁同步电机转矩波动的频率与幅值特性。根据电动汽车低速谐振特性与同步电机转矩波动幅频的对应特点,并且针对国内外少有文献对车用电机转矩波动测试方法进行分析的现状,搭建了转矩波动动态测试台架,通过试验验证了转矩波动频次分析的正确性,同时为了弥补波动动态测试会产生幅值及相位失真的不足,提出一种新型静态堵转测试方法,为电动汽车用永磁同步电机提供了准确的转矩波动测试评价手段。
电动车;传动系统谐振;永磁同步电机;转矩波动;转矩波动测试
0 引 言
随着世界各国对汽车排放要求的不断提高,现今各大主流整车厂都投人重金进行混合动力及纯电动汽车的研发。永磁同步电机(PMSM)具有高转矩密度、宽调速范围等优势,在电动车领域得到了广泛的应用。然而永磁同步电机也有一些不足,比如说齿槽力矩和转矩波动[1-4],近年来抑制转矩波动的方法也被广泛的分析和研究[5-12]。
相比传统动力总成,电动车新型传动系统增加了动力电机系统,在高转速区域,电机转矩波动会被转子惯量滤掉,然而在低转速区域波动对电机输出特性的影响还是比较明显的,波动会引起整车低速抖动,特别是波动的频率与传动系统谐振频率相近的情况[13]。动力电机转矩波动影响整车的驾驶性及舒适性,研究波动引起谐振的机理十分必要,而永磁同步电机转矩波动作为谐振的激励源,研究转矩波动的频次及幅值特性是分析系统谐振的基础。为消除波动对整车的影响,抑制永磁同步电机转矩波动对于电动汽车是一项重要应用技术,基于传统电机这部分技术相对成熟可靠,而结合车用永磁电机及控制方法特点设计电机试验台架完成转矩波动测试,并进一步给出合理的车用动力永磁同步电机转矩波动的评价方法是我们面临的新的技术难题。因此,综合考虑转矩波动对整车的影响及永磁电机转矩波动的特点,提出车用永磁同步电机转矩波动测试方法具有重要意义。
文献[14]论证了发动机扭振产生传动系统谐振的原理,并通过发动机主动扭矩补偿降低了谐振影响,但是目前尚未有文献详细分析电机引人传动系统谐振的原因及特点。文献[15]分析了电机气隙磁场谐波对转矩波动的影响,并通过斜槽等方法优化磁场,减小谐波分量。文献[16]从逆变器控制及测试系统误差、PWM调制方式及死区效应等影响人手,研究了时间谐波电流对转矩波动的影响。以上文献大多通过FEA方法进行分析,而缺少严格的试验评价手段对优化的方法进行验证。文献[17]分别设计了转矩波动的测试装置,并说明了传感器刚度、测试系统机械设计、负载测功机类型等对正确测试转矩波动的影响。文献[18]中采用了平衡式直接测量的方法,并分析了动态测试的特性及测试结果的偏差原因,给出了优化测试系统的方法。上述文献没有给出如何准确测量转矩波动幅值及相位的方法,也没有将矢量控制角度与转矩波动幅值结合进行测试。
本文结合混合动力车传动系统构型特点,分析了永磁同步电机转矩波动引发传动系统谐振的原因,推导了电机气隙磁场谐波引发电机转矩波动的机理,针对车用永磁同步电机引发传动系统谐振的低速特性,综合永磁同步电机转矩波动低转速区域幅频特点,设计了波动动态及静态测试装置,建模分析了动态测试对测试结果幅值及相位的影响,最终通过试验验证了转矩波动理论分析的正确性,并对比分析动态及静态测试结果,确定了转矩波动的测试评价方法,从而为车用永磁电机转矩波动测试评价提供了准确的方法。
1 电动车动力传动系统谐振模型
在实际的传动系统中,电机输出扭矩通过变速箱、驱动轴、差速器、半轴等传动机构作用在轮胎上,这些弹性单元的存在将在系统中引人谐振点,引发机械谐振。混合动力和纯电动汽车传动系统谐振与发动机扭转谐振原理相似,传动系统谐振的特点取决于电动车动力总成构型,而目前应用较为广泛的是混合动力P2构型,其中奔驰E400L和红旗插电式混动H7都是P2构型的典型代表,本文以P2构型为基础分析研究电动汽车谐振的特点。
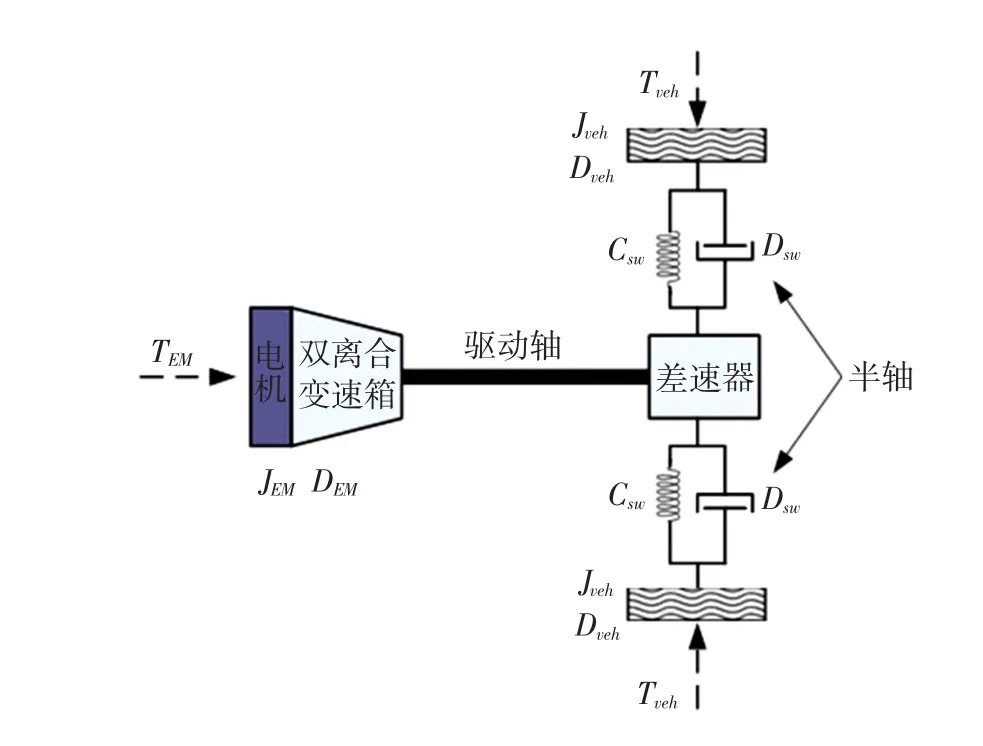
图1 电动车传动系统拓扑图Fig.1 An electric vehicle d rive system topology
P2构型的动力总成由涡轮增压汽油机、湿式分离离合器、永磁同步电机系统、七速双离合变速器、传动轴、差速器、左右半轴组成,电机布置在发动机和双离合变速箱之间,电机同发动机通过之间连接的湿式离合器解藕动力输出。当离合器分离时,整车可以通过电机进行纯电动行驶,当离合器结合时,电机与发动机串联输出,电机可行车助力,也可进行制动能量回收。这种构型使传动系统谐振问题产生新的特点,永磁同步电机的转矩波动频率相近或等于传动系统固有谐振频率的时候,整车纵向振动严重影响车辆性能表现及驾驶乘坐舒适程度,而且这种谐振会引人车身阶次振动,增加车内噪声,加速传动部件的疲劳[19]。
简化的传动系统模型见图1,相比传统动力总成,P2构型中的永磁同步电机转动惯量高,与传动轴、轮边惯量组成典型的双惯量系统,传动轴有阻尼和弹性环节。传动系统谐振可以通过以下的微分方程表示
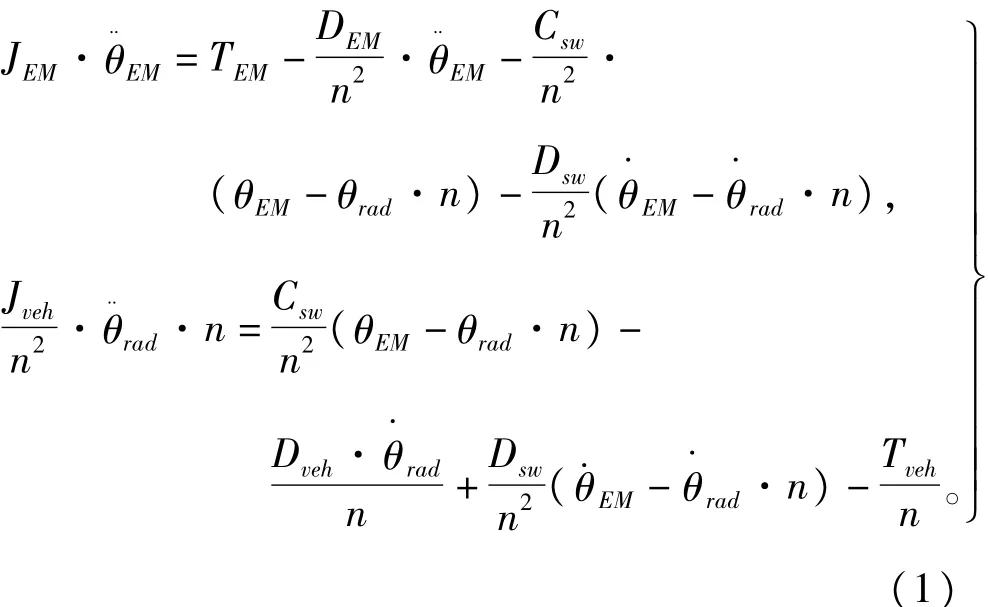
式中:JEM:动力电机惯量,Jveh:整车惯量,Dsw:传动轴阻尼系数,Csw:传动轴弹性系数,TEM:动力电机扭矩,Tveh:负载扭矩,DEM:电机端等效阻尼系数,Dveh:整车等效阻尼系数,n:变速箱速比。
TEM是通过HCU(整车控制器)发出的电机输出扭矩,不同的变速箱速比对应不同的传动系统谐振频率,电机转矩中波动成分的频率与电机当前的转速成正比,忽略半轴阻尼,对上述微分方程进行拉普拉斯变换,得

根据上式可以推导出图2所示的传动系统模型框图,从而推导出电机转速、整车加速度、电磁转矩之间的传递函数,如式(3)所示


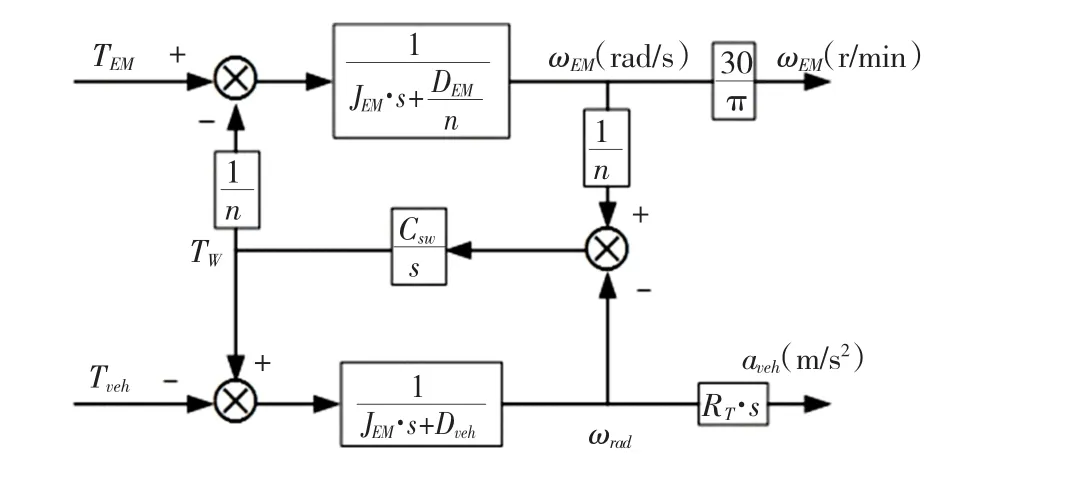
图2 传动系统模型框图Fig.2 Transm ission model diagram
在频域对传动系统模型的进行分析,很容易得出谐振现象的原因。图3代表式(3)的幅频特性和相频曲线,表示Gω(s)和Gacc(s)的传递关系,可以看出在谐振频率点,转速和加速度增益突然增大,传动系统对此频率点响应比较强烈。电机的转动惯量JSM,整车等效转动惯量Jveh,传动轴的刚度系数Csw是影响系统极点的主要参数,本文用于计算的传动系统模型主要参数来自于整车仿真及试验数据,Jveh大约240 kg/m,JEM约为0.122 kg/m,1挡传动比约为4.4,传动轴刚度系数约为6 200N·m/rad。传动系统对应电机转矩波动频率在8 Hz左右时发生谐振,1挡传动系统谐振频率约为2 Hz。

图3 电机转速传函Gω(s)与整车加速度传函Gacc(s)伯德图Fig.3 Motor speed transfer function Gω(s)and vehicle acceleration transfer function Gacc(s)
基于目前传动系统工艺及材料的发展,电动车动力总成继承了传统汽车特点,除采用轮毂电机的车型外,其余构型电机与整车之间都包含变速器和传动轴系统,正如上文论证的P2构型一样,整车惯量、传动比及传动系统弹性系数、阻尼系数等影响谐振频率的参数相差不大,转矩波动引发谐振的频率一般在10 Hz以下,具有低速特性。
2 永磁同步电机转矩波动分析
上一章分析了永磁同步电机转矩波动引发传动系统谐振的机理,下面主要分析永磁同步电机转矩波动产生的原因及特点。理想情况下,具有空间正弦分布绕组的永磁同步电机,通过三相正弦电流后,电磁转矩保持恒定,不存在转矩波动,但是实际运行中,反电势谐波及电流时间谐波会导致电磁转矩中的转矩波动。另外,永磁同步电机转子永磁体和定子齿槽相互作用会产生齿槽转矩,这部分随着转子旋转而周期变化的转矩同样也是转矩波动的组成成分[20]。通常来讲,引起车用永磁同步电机转矩波动的因素主要可以分为以下几点:
1)气隙磁场谐波;
2)齿槽力矩;
3)气隙磁场谐波;
4)定子电流时间谐波;
5)电机磁路饱和的影响;
6)量产制造工艺影响,如定转子偏心。
目前车用永磁同步电机为了提高转矩输出能力,降低损耗,在整车低速行驶区基本采用的是MTPA控制,通过增加Id电流提高转矩中的磁阻转矩,甚至在峰值扭矩点,Id与Iq近乎相等。电机输出的电磁转矩可以表示为

式中:ψF:永磁体磁链,Ld:d轴电感,Lq:q轴电感,基于式(4),可以将永磁电机输出的转矩波动成分定义成

式中:Tcog:齿槽力矩,Δψf磁链随转子电角度的幅值变量,ΔLdq:dq轴电感随转子电角度的幅值变量。Tcog幅值随转子位置变化,其变化周期与电机极对数及齿数配合相关。忽略电机磁路饱和效应及定转子偏心等生产制造工艺引起的偏差,且考虑到一般车用动力电机齿槽力矩比较小,本文主要分析气隙磁场谐波对转矩波动的影响。

永磁同步电机电磁转矩由永磁转矩和磁阻转矩组成,分析电磁转矩波动需在模型中引人空间气隙磁场谐波,转子dq轴谐波电压方程及电磁转矩方程如下[21]:式中:[idψˆd(θ)-idψˆq(θ)]代表在定子侧感生出的dq轴谐波磁链,磁链谐波是电机电气角度的函数,可表示为ψˆd(θ),ψˆq(θ)谐波磁链方程[22]
式中:fhd(θ),fhq(θ)表示磁链谐波dq轴分量;ψh,n为n阶磁链谐波幅值。三相基波正弦电流,表示成dq坐标系有如下形式

三相电流无时间谐波,φel为内功率因数角,且忽略定子铁心饱和影响,Ld、Lq不受定子开槽及电位角影响。谐波电磁转矩方程为

式中:ψ1为气隙主磁通基波分量,电磁转矩中既包含的由永磁转矩pψ i和磁阻转矩p(L-L)×1qdqidiq组成的恒定转矩,同样包含由磁场谐波引超的转矩波动分量

通过式(11)可以看到,转矩波动的频率为电机电频率的6n倍,即转矩波动第6n阶频率为6nfe,fe为电机电频率,n=1,2,3……∞。因φel在MTPA区域不随fe而改变,波动幅值大小与电频率无关,可根据转子位置确定。
3 转矩波动测量与分析
通过上两个章节的分析可知引起谐振的电机转矩波动频率较低,波动幅值与电频率无关,与转子位置相关。根据以上特点,下面介绍本文设计的转矩波动动态及静态测试装置。
一般来说转矩波动的动态测量比较难以实现,主要有两个原因:1)转矩传感器动态测试采样率限制;2)动态测试系统的谐振限制。本文使用的转矩波动测试装置结构图如图4所示。

图4 转矩波动检测装置结构图Fig.4 The structure fo the torque fluctuation detection system
为了准确的测取电机在低频率的转矩波动,在设计转矩波动测试装置时有以下几点需要特别注意:
1)采用采样率和精度都较高的传感器,试验选用的扭矩传感器为德国进口非接触式传感器;
2)为消除负载侧对转矩波动测试的影响,选用相比永磁同步电机惯量大20倍的感应异步机作为负载测功机,大惯量的负载测功机相当于惯性轮,滤除了负载侧转矩波动对测试的影响;
3)电机与测功机对中精度要求在0.05 mm之内,排除由于对中产生的误差转矩波动影响;
4)负载测功机控制用位置传感器选用分辨率为16384的旋变传感器,保证在低转速运行区域有较高的控制精度和稳定性;
5联轴器选用高刚度的金属材料,避免测试系统产生低通滤波器效应。
下面主要进行转矩波动动态测试特性分析,测试系统的动态方程为

忽略含有阻尼的项,简化后的系统传递函数如下

将负载惯量、电机惯量及传感器弹性系数带人式(13),传递函数的波特图如图5所示,测试的转矩波动频率在接近测试系统谐振频率的情况下,幅值突变失真,相位改变180°。由此可见,转矩波动动态测试具有一定的频率局限性,且幅值受到测功机及电机转动惯量的影响,测量值与真实值之比

图5 转矩波动动态测试传函Gtest(s)波特图Fig.5 Bode plots of the torque ripp le dynam ic testing transfer function
为消除动态测试可能产生的幅值及相位失真,在图4所示的测功机及转矩转速传感器中间设计加装了一个静态堵转装置,通过测功机角度控制模式将被测电机静止在某个转子位置上,类似于刹车盘的装置如图6所示将测功机连接轴压紧,该装置是通过液压系统提供的压紧力保证静态加载可承受足够的反向扭矩,测功机角度控制分辨率为0.5度,即可完成一个机械周期720等分的堵转。在给定相同输人工况的条件下,通过多角度堵转,可以静态测试永磁同步电机在不同转子位置下对应输出的扭矩值,同时记录旋变上传的位置角度及A、B、C相电流值,这样通过静态堵转加载扭矩测试可完成电机转矩波动测试。

图6 静态堵转装置Fig.6 Static locked-rotor device
4 试验结果及分析
为了验证之前的理论分析,我们选用国产某P2构型电动车上使用的三相永磁同步电机作为测试对象,电机极对数为10,槽数为30,额定扭矩为100Nm。试验验证分两部分实施:电机低转速区域动态转矩测试及电机静态堵转转矩测试。
试验过程中测试电机在不同转速下额定负载的转矩波动,电机转速分别选取120、240、300、360 r/min。图7分别为120、240、300、360 r/min的转矩波动波形,通过快速傅里叶变换可以得到转矩波动的频域特性,图8分别为120、240、300、360 r/min的转矩波动测试频谱图。
在图7中可以发现对应120 r/min及240 r/min转速的转矩波动在1个电周期内有6个脉动,而300 r/min及360 r/min对应的转矩波动没有明显规律。通过图8中的4个转速下转矩波动的FFT图形进行分析,可以清楚的看到转矩在6fe处有明显的波动分量,这与第3章论证的气隙磁通谐波产生电磁转矩波动率为6nfe结论一致,n=1。由第4章动态测试特性分析可知,测试系统对大于谐振频率的动态信号有幅值抑制效果,12fe、18fe频率点测试的波动幅值极小,通过FFT数据发现在300 r/min对应12fe即600 Hz频率的波动幅值测试结果约为0.1 N·m。
通过4幅FFT对比可以发现,波动都包含160~170 Hz频率的分量,这部分波动分量与转速无关。240、300、360 r/min对应的240、300、360 Hz转矩波动信号幅值随频率增大有明显衰减现象,且120 Hz与240 Hz转矩波动测试信号相位相差了180°,从而验证了第4章结论,160~170 Hz是测试系统的谐振频率点。谐振点处测试的扭矩主要是由于时间电流谐波、系统误差等转矩波动引起的。

图7 不同转速100 N·m转矩波动测试曲线Fig.7 Under different speed 100 N·m torque ripple test curve
为比较动态与静态的测试效果,电机静态堵转扭矩测试点也选取100 N·m进行测试。图9为静态转矩波动测试结果,在1个电周期内,转子位置从0~360电角度转矩明显有6个脉动,波动频率为电频率的6倍,其中12次、18次谐波脉动通过FFT可以得出。转矩波动的幅值约为5 N·m,相比120 r/min时波动为10 N·m的动态测试结果,堵转测试结果更真实准确,而动态测试受谐振影响幅值失真严重。堵转测试时在每个堵转点三相绕组相当于通过直流电,各个位置点的电流值拟合后可以在图中看到三相电流正弦度较好。

图8 不同转速100 N·m转矩波动测试频谱图Fig.8 Under different speed 100 N·m torque ripple test spectrum
通过上述静态堵转测试,可以更准确地得到不同转子位置下的转矩波动与三相电流对应关系,相比动态测试排除了固有系统误差的影响,转矩波动的相位和幅值更加真实。转矩波动动态测试在一定程度上可以反映转矩波动的幅值及频率,但是动态测试结果的准确性会受台架谐振的影响,而通过静态堵转测试可以验证对应整车低速运行区域即电机MTPA控制区域转矩波动消除方法的效果,也可为根据不同转子位置的转矩波动补偿算法提供补偿依据。

图9 静态堵转测试100 N·m转矩波动对应三相电流及转子位置角度测试曲线Fig.9 Static locked rotor test three-phase current and rotor position angle corresponding to 100 N·m torque ripple test curve
5 结 论
本文通过分析计算及试验可以得出以下结论:
1)永磁同步电机转矩波动频率与传动系统谐振频率相近时会引起整车传动系统谐振,谐振具有低速特性;
2)永磁同步电机非正弦气隙谐波磁场会引发6n阶转矩波动,低转速采用MTPA控制区域波动幅值大小仅与转子位置相关;
3)转矩波动动态测试受测试台架设计参数影响,台架谐振会引起转矩波动测试幅值及相位的失真;
4)静态堵转测试可稳定真实的反映电动车低速转矩波动幅值及相位,可为电动汽车用永磁同步电机转矩波动提供准确的测试评价手段。
[1] STAMENKOVIC I,JOVANOVICD,VUKOSAVIC S.Torque ripple verification in PM machines[C]//The International Conference on Computer as a Tool-EUROCON,Nov 21-24,2005,Belgrade,Yugoslavia.2005,2:1497-1500.
[2] ZHU Z Q,WU L J,XIA Z P.An accurate subdomain model for magnetic field computation in slotted surface-mounted permanentmagnetmachines[J].IEEE Transactions on Magnetics,2010,46 (4):1100-1115.
[3] 吴茂刚,赵荣祥.矢量控制永磁同步电动机的转矩脉动分析[J].电工技术学报,2007,22(2):9-14. WU Maogang,ZHAO Rongxiang.Analysis of torque ripples of vector-controlled permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Socoety,2007,22(2):9 -14.
[4] NG B H,RAHMAN M F,LOW T S,et al.An investigation into the effects ofmachine parameters on torque pulsations in a brushless DC drive[C]//14th Annual Conference of Industrial Electronics Society,Oct 24-28,1988,Singapore.1988,3:749 -754.
[5] HUNG JY,DING Z.Design of currents to reduce torque ripple in brushless permanentmagnetmotors[J].IEEE Proceedings B E-lectric Power Applications,1993,140(4):260-266.
[6] HOLTZ J,SPRINGON L.Identification and compensation of torque ripple in high-precision permanent magnet motor drives[J].IEEE Transactions on Industrial Electronics,1996,43 (2):309-320.
[7] QIANW,XU JX,PANDA SK.Periodic torque ripplesminimization in PMSM using learning variable structure controlbased on a torque observer[C]//The29th Annual Conference of the IEEE Industrial Electronics Society,Nov 2-6,2003,Singapore.2003,3:2983-2988.
[8] BRAMERDORFER G,AMRHEIN W,LANSER S.PMSM for high demands on low torque ripple using optimized stator phase currents controlled by an iterative learning control algorithm[C]//IECON 2013-39th Annual Conference of Industrial Electronics Society,Nov 10-13,2013,Vienna,Austria.2013: 8488-8493.
[9] JAHNS T M,SOONG W L.Pulsating torqueminimization techniques for permanentmagnet ACmotor drives-a review[J].IEEE Transactions on Industrial Electronics,1996,43(2):321-330.
[10] LI T,SLEMON G.Reduction of cogging torque in permanent magnetmotors[J].IEEE Transactions on Magnetics,1988,24 (6):2901-2903.
[11] PARK Y,CHO JH,SONG SG,et al.Study on reducing cogging torque of Interior PM Motor for electric vehicle[C]//2012 IEEE Vehicle Power and Propulsion Conference(VPPC),Oct9 -12,2012,Seoul,South Korea.2012:171-175.
[12] 杨明,胡浩,徐殿国.永磁交流伺服系统机械谐振成因及其控制[J].电机与控制学报,2012,16(1):79-84. YANG Ming,HU Hao,XU Dianguo.Cause and suppression of mechanical resonance in PMSM servo system[J].Electric Machines and Control,2012,16(1):79-84.
[13] WANG Y,JING H,CHENW,et al.The analysis and simulation ofmotor's torque ripple in electric vehicle[C]//2011 International Conference on Consumer Electronics,Communications and Networks(CECNet),April 16-18,2011,Xianning,China.2011:5328-5331.
[14] BERRIRIM,CHEVREL P,LEFEBVRE D.Active damping of automotive powertrain oscillations by a partial torque compensator[J].Control Engineering Practice,2008,16(7):874-883.
[15] AZAR Z,ZHU Z Q,OMBACH G.Influence of electric loading and magnetic saturation on cogging torque,back-EMF and torque ripple of PM machines[J].IEEE Transactions on Magnetics,2012,48(10):2650-2658.
[16] CHEN S,NAMUDURIC,MIR S.Controller-induced parasitic torque ripples in a PM synchronous motor[J].IEEE Transactions on Industry Applications,2002,38(5):1273-1281.
[17] HEINS G,THIRLE M,BROWN T.Accurate torque ripple measurement for PMSM[J].IEEE Transactions on Instrumentation and Measurement,2011,60(12):3868-3874.
[18] 朱宏伟,邹继斌.平衡式永磁同步电动机力矩波动直接测试系统的动态特性研究[J].电工技术学报,2007,22(7):160 -164. ZHU Hongwei,ZOU Jibin.Dynamic characteristic analysis on the direct torque ripple testing system of PMSM[J].Transactions of China Electrotechnical Society,2007,22(7):160-164.
[19] 梁锐.电动车动力传动系统扭转振动研究:[D].上海:同济大学汽车学院车辆工程,2008:10-15.
[20] 王秀和,丁婷婷,杨玉波,等.自起动永磁同步电动机齿槽转矩的研究[J].中国电机工程学报,2005,25(18):167 -170. WANG Xiuhe,DING Tingting,YANG Yubo,etal.Study of cogging torque in line-start permanent magnet synchronous motors[J].Proceedings of the CSEE,2005,25(18):167-170.
[21] 李景灿,廖勇.考虑饱和及转子磁场谐波的永磁同步电机模型[J].中国电机工程学报,2011,31(3):60-66. LIJingcan,LIAO Yong.Model of permanentmagnet synchronous motor considering saturation and rotor flux harmonics[J].Proceedings of the CSEE,2011,31(3):60-66.
[22] CHO K Y,BAE JD,CHUNG SK,etal.Torque harmonicsminimisation in permanent magnet synchronous motor with back EMF estimation[J].IEEE Proceedings-Electric Power Applications,1994,141(6):323-330.
(编辑:张诗阁)
Analysis and test for torque ripp le of permanentmagnet synchronousmotor for electric vehicle
WANG Si-bo, ZHAO Hui-chao, LIZhi-yu, WANG Xiao-xu
(Electric Vehicle Dept,FAW R&D Center,Changchun 130011,China)
The characteristic of powertrain torsional vibration was studied in an electric vehicle,themathematical equation of powertrain torsional vibration was built,and the reason was that the electric vehicle powertrain resonateswithmotor's torque ripple in low speed condition.Then,themodel of torque ripple due to non-sinusoidalmagnetic field distribution was built,and the orders and frequencies of torque ripple in PMSM(permanentmagnet synchronousmotor)were analyzed.According to the relationship between the torsional vibration in low-speed of the electric vehicle and the frequency ofmotor torque ripple,for the situation that therewere few literatures on analyzing the torque ripple and testmethod of PMSM in electric vehicles,a dynamic torque ripple test bench was built.The correctness of the torque ripple frequency analysis is verified by testing.Meanwhile,in order tomake up the amplitude and phase distortion caused by the dynamic test,a new locked-rotor staticmethod for torque ripple testwas proposed.It provides an accuratemeans of testing and evaluation for the torque ripple of PMSM in electric vehicles.
electric vehicle;powertrain torsional vibration;permanentmagnet synchronousmotor;torque ripple; torque ripple test
10.15938/j.emc.2015.09.014
TM 306
A
1007-449X(2015)09-0095-08
2014-06-25
中央企业电动车产业联盟共性技术合作项目-驱动电机系统评价技术(JS-308)
王斯博(1986—),男,硕士,工程师,研究方向为车用动力电机系统测试评价技术;赵慧超(1977—),男,硕士,高级工程师,研究方向为车用动力电机系统设计;李志宇(1986—),男,学士,助理工程师,研究方向为动力电机系统测试评价技术;王晓旭(1986—),女,硕士,助理工程师,研究方向为动力电机系统测试评价技术。
王斯博