一种改进型变步长MPPT算法
2015-06-27马永郭前岗周西峰南京邮电大学自动化学院江苏南京210023
马永,郭前岗,周西峰(南京邮电大学自动化学院,江苏南京210023)
一种改进型变步长MPPT算法
马永,郭前岗,周西峰
(南京邮电大学自动化学院,江苏南京210023)
针对固定步长比较法的跟踪速度和精度不够理想的特点,提出一种新的变步长扰动观测法来跟踪光伏电池的最大功率点。依据光伏电池的P-U曲线特性,在最大功率点两侧采用不同的变步长控制策略。在左侧,采用较大的步长选择策略。在右侧,采用较小的步长选择策略。同时给出步长的选择方法。在MATLAB/Simulink环境下,搭建光伏电池最大功率点模型并进行仿真。仿真结果表明,该算法可以显著提高最大功率的跟踪速度与精度,有效抑制在最大功率点处的振荡现象。
光伏电池特性;最大功率点跟踪;变步长;速度/精度
[1]给出一种变步长控制策略,分析了P-U曲线的特性区间,在最大功率点附近采用小步长扰动观测法,在最大功率点两侧采用大步长扰动观测法。但是该文献没有给出大、小步长的选取方法。该策略没有注意到P-U特性曲线在最大功率点两侧的变化率不同,没有给出步长选择算法。
参考文献[2]分析了|d P/d U|曲线在最大功率点(MPP)两侧的变化差异,提出了一种以P-U曲线切线角的正弦值为步长参数的变步长控制策略。这种步长选取方法能够使得在最大功率点附近步长变化更为平滑、减小震荡。但在远离最大功率点时,由于正弦函数值较小,在一定的切线角度内难以很好地区分步长大小,进而影响了跟踪速度。此方法还是没有将最大功率点两侧的P-U曲线分开对待,没有分别采用不同的步长选择方法。
参考文献[3]提出了一种变步长MPPT算法,其设定了三种不同的步长,并根据功率变化的大小来选择步长。但是步长还是固定的,系统在最大功率点处的振荡依然较大。
综上所述,以扰动观测法为基础,依据P-U曲线特性,在最大功率点两侧采用不同的步长选择方法,提出一种新型变步长扰动观察法的MPPT算法。不同的步长选择方法能够优化跟踪速度与精度,同时能够减小在稳态时的误差。本文在对新的步长选择方法进行分析后,利用MATLAB/Simulink环境,对光伏电池仿真研究。仿真实验中应用本文所提的方法进行MPPT控制,实现了对最大功率点的跟踪控制,验证了该方法的高效性。
1 光伏电池模型及其特性分析
1.1 光伏电池数学模型[4-6]
光伏电池的等效电路如图1所示。

图1光伏电池的等效电路图
图1 中Isc为光伏电池发出的电流,IVD为二极管饱和电流。RL为光伏电池负载,IL为负载电流,负载电压为UL。
由图1可得光伏电池的输出特性方程为:

式中,q为电荷量(1.6×10-19C);A为二极管因子;K为玻尔兹曼常数(1.38×10-23J/K);T为开氏温度;IL为光伏电池输出电流;Isc为光伏电池短路电流;IDO为光伏电池在无光照时的饱和电流。
理想光伏电池其等效串联电阻Rs较小,并联电阻Rsh较大。因此,在理想模型下可以忽略Rs、Rsh的影响。光伏电池的输出特性可以表示为:

标准测试条件下,光伏电池输出特性的工程计算方法为:


其中,Um、Im为最大功率点输出电压、电流;Uoc、Isc为光伏电池的开路电压、短路电流。式(3)适用于标准照度Sref=1 000 W/m2、标准温度Tref=25℃时的光伏电池模型。当照度、温度变化时就不再适用了。所以,工程上采用如下方法来修正Um、Im、Uoc、Isc。

以上公式中系数α、β、γ的典型值为α=0.002 5,β= 0.5,γ=0.002 88。依据以上数学模型,在MATLAB/ Simulink环境下建立光伏电池的仿真模型,并对电池的输出电压电流、功率电压等特性进行分析研究。
1.2 光伏电池输出特性分析
对光伏电池模型的分析可以发现,光照强度、工作温度和负载阻抗是影响光伏电池输出功率的主要参数。光照强度主要影响光伏电池的短路电路,工作温度主要影响光伏电池的开路电压。
图2为光伏电池的输出电压与电流关系曲线,可以看出电压与电流不具线性关系。从图3的P-U特性曲线可以看出,在最大功率点两侧,左侧P-U曲线的变化较右侧平缓。距离最大功率点相同距离处,左侧的|d P/ d U|,即|P′|值小于右侧。由图4中的|P′|曲线可以看出,右侧|d P/d U|的变化远大于左侧。

图2 不同光强下的I-U曲线

图3 不同光强下的P-U曲线

图4 输出功率和电压函数图
2 扰动观测法原理
扰动观测法是目前实现MPPT最常用的自寻优方法之一。扰动观测法的基本原理是:给光伏电池的输出电压施加一定量的定向扰动,然后比较扰动前后光伏电池输出功率的变化。若变化为正,输出功率增加,则保持原扰动方向继续扰动,否则向反方向扰动。在图4中,点P为最大功率点,P1处在左侧,P2处在右侧。要达到最大功率点,在P1要增大光伏电池输出电压ΔU1,在P2处要减小输出电压ΔU2。可以看出电压改变的大小不同,即ΔU1>ΔU2。且距离最大功率点越远,ΔU1与ΔU2差异越大。
由于扰动的存在,扰动观测法很难消除在最大功率点处的来回振荡现象。同时,扰动步长的大小将直接影响最大功率跟踪的速度与精度。图5为定步长扰动观测法控制流程图。

图5 定步长扰动观测法流程图
3 改进型变步长扰动观测法
在定步长扰动观测法中,为加快系统的跟踪速度,可适当增大扰动步长。但是,较大的扰动步长会加强光伏电池在最大功率点附近的振荡。较小的扰动步长可以减小振荡,而系统的跟踪速度会相应下降。所以,为解决速度与精度的矛盾,出现了变步长扰动观测法。传统的变步长扰动观测法有最优梯度法、逐步逼近法等。由于在最大功率点右侧,功率对电压的导数P′值过大,已经不适合做步长选择参数。所以,基于最优梯度法的变步长扰动观测法由于采用统一的步长选择公式,不能较好地适应P-U曲线的变化。
本文提出在最大功率点左侧采用功率对电压的导数作为步长选择参数,在最大功率点右侧采用P-U曲线的切线角的正弦值作为步长选择参数。步长选择是变化的,且步长在接近最大功率点处具有收敛性,能够很好地抑制在最大功率点附近的振荡现象。图4中的小图显示了在最大功率点两侧步长选择参数的变化情况。易得出在最大功率点处,基于P′与sin(arctan(|P′|))的两种步长参数都收敛到零。
最大功率点左侧步长参数K1:

最大功率点右侧步长参数K2:

从式(13)、式(14)可得,在最大功率点处,P′=0,PU曲线的切线角为零。在从两侧向最大功率点接近的过程中,K1、K2都趋向零,进而步长趋向于零。步长在最大功率点附近具有收敛性,所以步长可以较小,进而抑制振荡。图6为改进型变步长扰动观测法流程图。
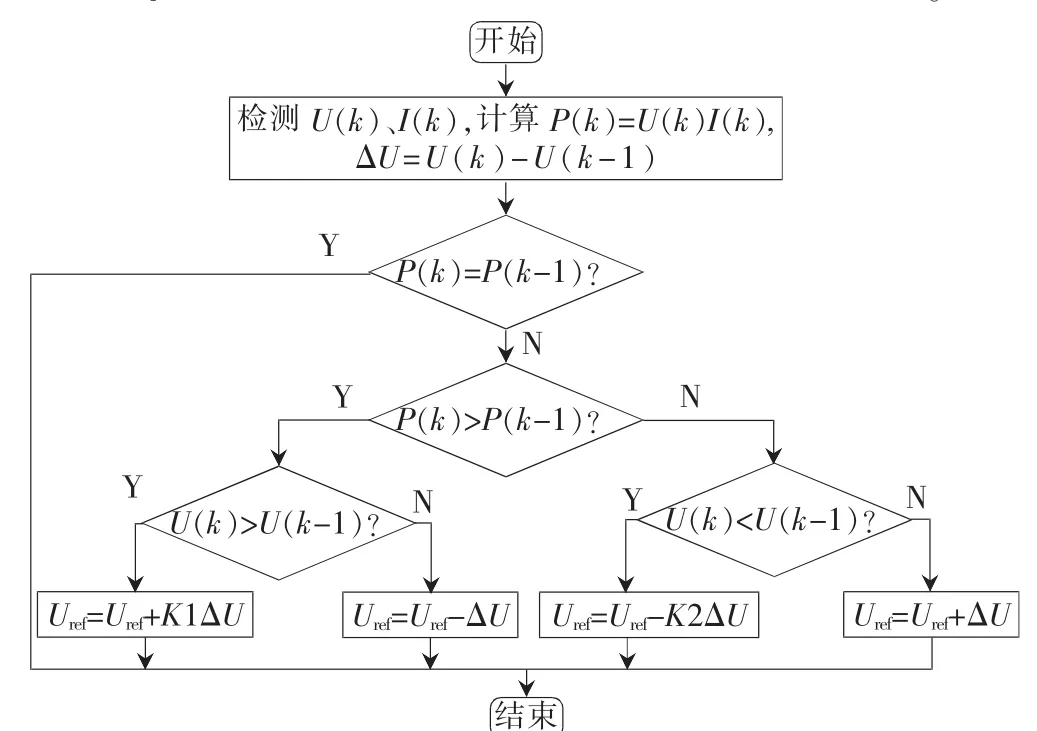
图6 改进型变步长扰动观测法流程图
4 MATLAB/Simulink建模仿真研究
为验证所提出的改进型变步长扰动观测法的有效性,利用MATLAB/Simulink建立光伏发电系统仿真模型,如图7所示。模拟光伏电池在环境温度为25℃,光照强度为600 W/m2、1 000 W/m2、400 W/m2时的运行情况。光伏电池的开路电压为22 V、短路电流为8.58 A,最大功率点的电压为17.7 V、电流为7.94 A。通过Simulink的S函数编写MPPT算法,完成对光伏电池最大功率点的跟踪控制。

图7光伏电池最大功率点仿真模型
图8 中的小图为局部放大图。可以看出本文所提算法明显优于传统算法。在开机跟踪速度上,改进型算法在不到0.001 s的时间内即达到稳定输出,而传统算法约0.001 5 s。在跟踪精度上,改进型算法在最大功率点处无明显振荡,而传统算法振荡较明显。在外部光照强度改变时,改进型算法比传统算法振荡较小。以上仿真结果表明,改进型算法的步长参数要优于传统算法。
5 结论
本文首先分析了光伏电池的特性及数学模型。在研究P-U特性曲线的基础上,分析影响最大功率点跟踪速度与精度的问题。针对P-U曲线在最大功率点两侧变化的差异,提出了改进型变步长扰动观测法。通过MATLAB/Simulink环境搭建仿真模型,由S函数实现算法,进行仿真实验。仿真结果表明,本文所提的算法相比于定步长算法具有跟踪速度快、精度高的特点。光伏电池在日照强度变化时依然能够较快速稳定地输出最大功率。

图8 改进型变步长扰动观测法输出功率仿真波形图
参考文献
[1]张超.光伏发电系统变步长MPPT控制策略研究[J].电力电子技术,2009,43(10):47-49.
[2]王亚楠.一种新型变步长光伏最大功率点跟踪控制策略[J].电气传动,2015,45(1):54-57.
[3]朱铭炼,李臣松.一种应用于光伏系统的变步长扰动观察法[J].电力电子技术,2010,44(1):20-22.
[4]张兴,曹仁贤.太阳能光伏并网发电及其逆变控制[M].北京:机械工业出版社,2011.
[5]MESSENGER R A,VENTRE J.Photovoltaic systems engineering(2nd ed)[M].Boca Raton:CRC Press LLC,2004.
[6]王长贵,王斯成.太阳能光伏发电实用技术[M].北京:化学工业出版社,2005.
A modified variable step size MPPT algorithm
Ma Yong,Guo Qian′gang,Zhou Xifeng
(School of Automation,Nanjing University of Posts and Telecommunications,Nanjing 210023,China)
Aiming at the problems that tracking speed and precision are not ideal in the fixed step size comparison method,a new variable step disturbance observation method is put forward to track the maximum power point of photovoltaic cells.On the basis of P-U curve characteristics of photovoltaic cells,it uses different control strategies on the both sides of the maximum power point. On the left side,it adopts the strategy of large step length,and on the right side,it adopts the strategy of small step length.At the same time step length selection method is given.In the MATLAB/Simulink environment,a model of maximum power point of photovoltaic systems is built.The simulation results show that the proposed algorithm can significantly improve the tracking speed and precision of the maximum power,effectively restrain the oscillation phenomena of the maximum power point.
characteristic of photovoltaic array;maximum power point tracking;variable step size;speed/accuracy
TP391.9
A
1674-7720(2015)17-0078-03
马永,郭前岗,周西峰.一种改进型变步长MPPT算法[J].微型机与应用,2015,34(17):78-80,84.
0 引言
2015-04-13)
马永(1989-),男,硕士研究生,主要研究方向:自动控制系统及先进功率变换。
郭前岗(1960-),男,博士,教授,主要研究方向:自动控制系统及先进功率变换系统理论与技术。
周西峰(1960-),男,学士,教授,主要研究方向:计算机监测与控制技术、智能与网络化控制系统。
太阳能作为清洁可再生能源,分布广泛,应用前景好。当今,光伏发电系统已得到了广泛的应用。在光伏发电系统中,光伏电池的运行受到外部环境的影响。光伏电池的运行特性表明,其最大输出功率与光照强度、温度等因素有关,且具有非线性特性。因此,为了让光伏电池工作在最佳状态,必须使用可靠的控制算法对光伏电池的最大输出功率进行跟踪控制,以保证光伏电池始终能够输出最大功率,从而提高光伏电池的工作效率。这一跟踪过程称为最大功率跟踪(Maximum Power Point Tracking,MPPT)。
常用的MPPT算法主要有恒定电压法、扰动观测法、电导增量法以及智能MPPT算法。扰动观测法具有结构简单、被测量少、控制简单、易于实现等优点,应用较广,但其存在振荡及误判问题,使系统很难准确地跟踪到最大功率点。
