一种新型变步长光伏最大功率点跟踪控制策略
2015-06-26王亚楠杨旭红王军成王严龙李浩然冯成臣
王亚楠,杨旭红,王军成,王严龙,李浩然,冯成臣
(上海市电站自动化技术重点实验室,上海电力学院自动化学院,上海200090)
光伏发电系统的传输功率随外部环境(光照强度、环境温度、负载)及本身技术指标(输出阻抗)等因素变化而变化,故光伏电池输出特性具有明显的非线性[1-2]。光伏发电系统若能以最大功率输出,可以提高光伏电池的工作效率,即最大功率追踪(MPPT)在光伏电池发电系统中显得非常重要。
传统的MPPT 方法主要有电导增量法[1],恒定电压法[3],扰动观察法[4-5]以及智能算法[6-7]。其中扰动观察法具有简便、被控参数少等优点,主要分为定步长算法及变步长算法两种控制思想,而传统定步长算法扰动步长的选取不方便,跟踪速度与控制精度无法兼顾。近年来学者们提出了变步长算法,而其中影响步长的直接参数的设计成为研究热点。
本文针对传统变步长[8]直接参数P'(u)的缺陷,通过对其的优化,在此基础上设计了一种新的步长直接参数。在Matlab/Simullink环境建立了光伏电池的仿真模型,运用新方法实现了对所搭建的光伏发电系统最大功率点的跟踪,并模拟外界环境突然改变,对比仿真结果分析了传统定步长算法、传统变步长算法与新变步长算法的动态特性。
1 光伏电池输出特性
太阳能光伏电池通过半导体材料的光伏效应将太阳能转换成电能输出,其特性随着光照强度与温度的变化而变化[1-2]。实际上就是一个大面积平面二极管,常用理论模型[9]如图1所示。

图1 光伏电池的等效电路Fig.1 Equivalent circuit for PV
在实际的工程应用中,其输出电流为[10]

其中
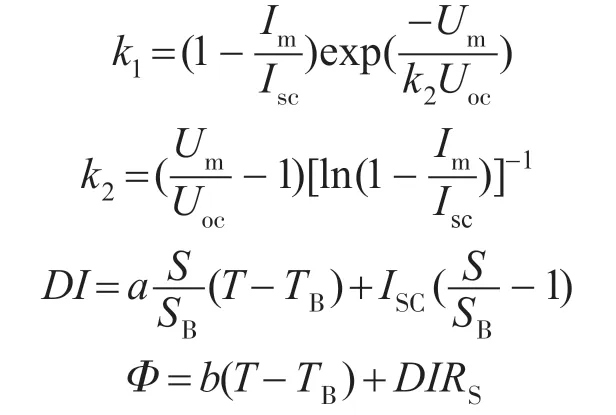
式中:Isc为光伏电池的短路电流;Uoc为开路电压;I为光伏电板输出电流;U为输出电压;Im为最大功率点时对应电流;Um为最大功率点时对应电压;SB,TB分别为标准测试下的参考光照强度和光伏面板温度,其值一般分别为1 000 W/m2,25 ℃;S,T分别为当前光照强度和光伏面板温度;a,b分别为电流变化温度系数和电压变化温度系数;Rs为串联电阻[5]。
一般情况下,串联电阻Rs较小,并联电阻Rsh较大,因此在理想电路计算中Rs和Rsh可忽略不计[7]。因此,在标准测试下,得光伏电池的输出功率为

依照上述理想状态下得到的光伏电池的数学模型,在Matlab/Smulink 里建立了光伏电池仿真模型并仿真验证光伏电池基于光照强度与温度下的输出特性,其相关参数UOC,ISC,Um,Im分别为29.4 V,8.15 A,23.7 V,7.85 A。当温度T 设定为25 ℃时,依次分别改变光照强度的大小为300 W/m2,500 W/m2,1 000 W/m2得到模型输出功率P随光照强度的变化情况,如图2a 所示。类似的,设定光照强度S为800 W/m2时,依次改变外界环境温度的大小为10 ℃,25 ℃,40 ℃得到模型输出功率P随温度的变化情况,如图2b所示。

图2 光伏电池P—U特性曲线图Fig.2 P—U characteristic curves of PV
从图2 的仿真结果,可以得出所搭建的光伏电池模型的输出功率随光照强度递增,随温度递减,且伴随着最大功率点MPP 的移动,从而验证了搭建的光伏电池模型的输出特性与实际特性相对一致,可基本满足仿真实验的需要。
2 传统变步长算法基本原理
由于传统定步长跟踪精度和响应速度存在无法兼顾的缺陷,因此,在光伏MPPT 算法中,变步长算法被广泛运用。传统变步长算法主要有两种思想:一种是根据功率的变化率几个阶段赋予不同的步长[9];另一种是以光伏P—U曲线的导数P'(u)作为决定扰动步长的直接参数[11],使得步长在最大功率点两侧自适应性调整方向与大小,工作在MPP 点左侧时进行正方向扰动,而在MPP右侧时反方向进行扰动,且距离最大功率点越近步长越小。因此,后一种控制思想具有独特的优越性。
对式(2)输出功率P求导,得到一阶导数P'(u)表达式为
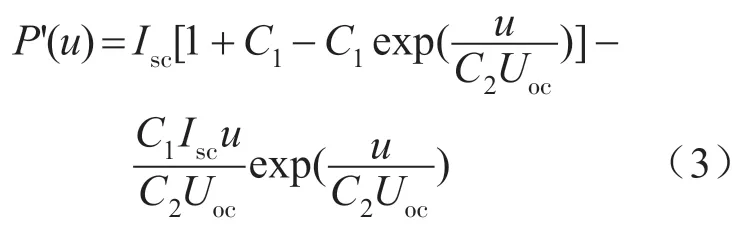
在标准测试下,绘制P—U曲线与|P'(u)|曲线如图3所示,从图3中可以看出,在最大功率点的左侧时P'(u)为正,而工作在最大功率点的右侧P'(u)为负,符合扰动方向的需求且两侧为关于|u-Um|的单调减函数12],这就基本满足作为步长变化直接参数的条件。其表达式为

式中:D(k)为第k个周期的占空比;N为步长调整参数,传统变步长算法中N为P'(u);a为常数。

图3 光伏电池P—U曲线和||P'(u)—U曲线图Fig.3 Curves of P—U and||P'(u)—U
然而,从图3 中也可以看出这种以P'(u)为直接参数的变步长算法存在以下缺陷[7]:最大功率点的右侧|P'(u)|的变化率要远大于左侧,且P''(u)并非关于|u-Um|的单调减函数,使得这种变步长算法的响应特性较差。另外,此时|P'(u)|的值也要远大于左侧,这就使得两侧的步长差异过大,相对影响了a 值的取定,若a 值较小则影响跟踪的时间,而取的较大,一旦工作在MPP右侧时,容易出现较大振荡,如图3中Dn所示,故步长参数N需要进一步优化。
3 优化步长参数思想
本文针对传统变步长的缺陷,基于功率变化率提出一种新的步长参数。新步长算法主要以P—U曲线的切线角α的正弦值为直接参数,其表达式为

为了便于取其变化率,根据反三角函数公式并对其求导得

根据式(6),绘制步长变化率函数图像如图4 所示,当P'(u)为较大值时(如图中B 点),变化率较小,而在0 附近时(如图中A 点),变化率较大,使得在MPP附近时变化率更加明显,从而加快了跟踪速度,另外步长变化率N'为基于|u-Um|的单调减函数,这使得算法具有更好的响应特性。
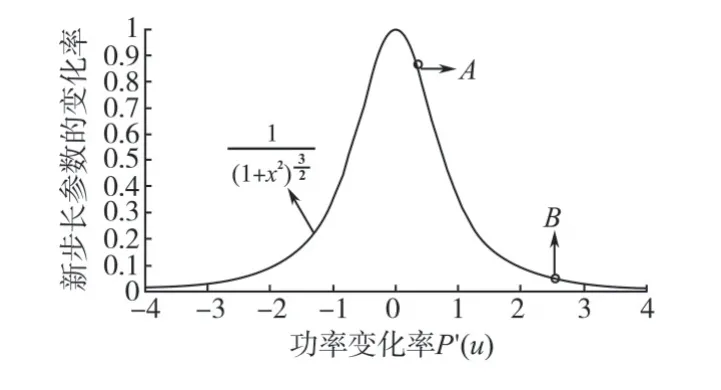
图4 新步长参数的变化率曲线图Fig.4 Curve of the rate of new step-size parameter
图5 为两种不同的步长参数随输出电压变化对比图,其中小图为在MPP 附近两种参数曲线的放大图。可以看出新参数首先具有与P'(u)类似的性质,即为基于|u-Um|的单调减函数且在MPP 左侧值为正,右侧值为负。此外由于新步长参数函数为三角函数,因此,与P'(u)在MPP 右侧的值过大不同,新参数在最大功率点两侧的大小具有相同的范围均小于1,即在MPP 两侧的数学特性大致相同,使得当工作电压超过Um时,不易出现大幅度的振荡,a 值的取定也可以相对较大,从而增加MPP 的追踪速度。以上从理论上证明了以函数sin{arctan[P'(u)]}作为直接参数可以解决以P'(u)为直接参数的传统变步长算法的缺陷,具有一定的优化作用,更适合做为变步长扰动的步长参数,是一个相对比较理想的MPPT跟踪方法。

图5 两种不同参数的对比图Fig.5 Comparison diagram of two different kinds of parameter
4 仿真与分析
本文基于Boost电路模块建立光伏发电系统仿真模型,通过改变占空比的大小来改变光伏电池的工作电压[13],在Matlab/Smulink 环境下建立的光伏发电系统模型如图6所示。部分参数如下:电感L值设为1e-3 H,电容C,CF值分别为300e-6 F和500e-6 F,设置三角波为[-0.5,0.5],零阶采样保持器为1e-5。仿真采用ode45算法。设定板面温度T为25 ℃,仿真时间为0.5 s,在0.2 s时,光照强度S从1 000 W/m2突降到500 W/m2进行仿真。

图6 光伏发电系统仿真模型Fig.6 Simulation model for photovoltaic power system
仿真实验分别采用了传统定步长算法、传统变步长算法及本文所提出的新变步长算法,3种算法均成功跟踪到了最大功率点,完成了仿真任务。
图7为传统定步长算法与新方法的仿真对比图,其中小图为稳定后的局部振荡放大图。可以看出,在响应速度上,新变步长算法一开始跟踪到最大功率点的时间约为0.02 s,而传统定步长约为0.1 s,而尤为明显的是当光照强度在0.2 s突然发生变化时,传统定步长的跟踪时间大于0.3 s,而新变步长算法不到0.03 s即重新跟踪到此时最大功率点。在控制精度上,如图7中的小图所示,新算法的振荡幅度较传统定步长算法要更小,基本控制在1 W左右,反映了新变步长算法良好的动态特性与控制效率。图8为传统变步长算法与新方法的仿真对比图,其中小图为0.2 s光照突变到重新达到稳定时的局部放大图。可以看出,当光照强度发生变化时,传统变步长重新追踪最大功率点则需0.05 s,说明新算法的适应性更强,调整更快,从图8 中小图可以看出新变步长算法达到稳定后振荡幅度更小,以上结果表明新算法的参数要优于传统变步长的以P'(u)直接参数。

图7 传统定步长算法与新方法的仿真对比图Fig.7 Comparison simulation figure of traditional fixed-step algorithm and new method

图8 传统变步长算法与新方法的仿真对比图Fig.8 Comparison simulation figure of traditional variable-step algorithm and new method
5 结论
本文以传统变步长算法为基础,针对其步长参数的不足,优化其步长参数,设计了一种新的变步长算法。通过仿真实验验证了搭建的光伏电池列阵模型的正确性,组建基于Boost 电路的光伏发电系统仿真模型,仿真结果表明,新算法是可行的,较传统定步长算法与传统变步长算法具有更快的响应速度和更好的控制精度,表现出优秀的跟踪性能。而与智能控制算法结合的MPPT相关算法将是下一阶段的研究重点。
[1]张翔,王时胜,余运俊,等.基于电导增量法MPPT仿真研究[J].科技广场,2013,2(7):60-64.
[2]郭海霞,石明垒,李娟,等.基于Matlab光伏发电系统的MPPT控制与仿真[J].山西农业大学学报,2013,33(1):76-81.
[3]王丽萍,张建成.光伏电池最大功率点跟踪控制方法的对比研究及改进[J].电网与清洁能源,2011,27(2):52-55.
[4]Femia N,Petrone G,Spagnulol G,et al.Optimization of Perturb and Observe Maximum Power Point Tracking Method[J].IEEE Trans.on Power Electronics,2005,20(4):963-973.
[5]刘邦银,段善旭,刘飞,等.基于改进扰动观察法的光伏列阵最大功率点跟踪[J].电工技术学报,2009,24(6):91-94.
[6]李兴鹏,石庆均,江金元.双模糊控制法在光伏并网发电系统MPPT中的应用[J].电力自动化设备,2012,32(8):113-116.
[7]苑薇薇,李延雄.模糊PID 应用于光伏发电MPPT 的研究[J].沈阳理工大学学报,2013,32(5):48-54.
[8]王义飞,吴伟,张皞华,等.改进型变步长光伏最大功率点快速跟踪[J].上海大学学报,2011,11(3):249-258.
[9]殷桂梁,杨丽君,王珺.分布式发电技术[M].北京:机械工业出版社,2008.
[10]杨金孝,朱琳.基于Matlab/Simulink 光伏电池模型的研究[J].现代电子技术,2011,34(24):192-194.
[11]周习祥,李加升.基于自适应占空比扰动算法的光伏发电系统MPPT 控制[J].电气传动,2012,42(8):24-28.
[12]唐磊,曾成碧,苗虹,等.基于切线角的光伏变步长最大功率跟踪控制策略[J].电力系统自动化,2013,37(20):28-33.
[13]杨秀,臧海洋,舒海莲,等.基于BOOST电路的PV最大功率点追踪仿真[J].上海电力学院学报,2010,26(6):591-596.
[14]付周兴,靳海亮,李忠.一种基于Boost电路的光伏最大功率跟踪方法[J].半导体发电,2013,34(1):141-144.