TM65 m射电望远镜低频段系统噪声温度测试和分析∗
2015-06-26王锦清12虞林峰12赵融冰12蒋栋荣12娄方汛123劳保强123斌12健12范庆元12钱志翰12刘庆会12蒋甬斌12
王锦清12虞林峰12 赵融冰12 蒋栋荣12 娄方汛123劳保强123 李 斌12 董 健12 范庆元12 钱志翰12刘庆会12 蒋甬斌12
(1中国科学院上海天文台上海200030)
(2中国科学院射电天文重点实验室南京210008)
(3桂林电子科技大学桂林541004)
TM65 m射电望远镜低频段系统噪声温度测试和分析∗
王锦清1,2†虞林峰1,2 赵融冰1,2 蒋栋荣1,2 娄方汛1,2,3劳保强1,2,3 李 斌1,2 董 健1,2 范庆元1,2 钱志翰1,2刘庆会1,2 蒋甬斌1,2
(1中国科学院上海天文台上海200030)
(2中国科学院射电天文重点实验室南京210008)
(3桂林电子科技大学桂林541004)
首先介绍了天马65 m射电望远镜(简称TM65 m)接收系统,包括L、S、C、X 4个频段各部分的噪声指标.然后对系统噪声温度的几种测试方法进行了讨论;对影响系统噪声温度测量的若干关键因素进行了分析,包括非线性误差、馈源网络插入损耗和失配误差等.采用Y因子法对试验室的噪声源定标值进行了校核,校核后偏差达到0.2 K左右.最后给出了TM65 m 4个低频段系统噪声温度的实测结果,并进行了分析.
大气效应,技术:雷达天文,宇宙背景
1 引言
TM65 m是目前国内口径最大的实面射电望远镜,其工作波段有L、S、C、X、Ku、K、Ka、Q 8个,几乎覆盖50 GHz以下70%频率范围,也是目前国内波段最全的射电望远镜.该射电望远镜采用卡塞格林式天线结构,主面直径65 m,并且具有主动面结构,用于高频观测时补偿面形的重力变形.目前该天线已经配备了L、S、C、X低频波段4套接收机,其中S/X为双频接收机,即其馈源部分为两个波段共用,其余均为单频馈源.
对于一架射电望远镜微波接收系统,其主要由天馈部分(包括天线面、反射面、馈源、极化器)、致冷LNA(Low Noise Ampli fi er)以及后级变频链路组成.通常把致冷LNA部分称为接收机,事实上,现在TM65 m上的设计已经将部分频段的馈源和极化器进行致冷,并且有些文献中也已经把馈源和极化器作为接收机部分,但是为了讨论极化器和LNA匹配问题的方便,文中论及的接收机还是定义为致冷LNA部分.
射电望远镜的系统噪声,除了包含天馈部分、接收机的噪声外,还包含天空大气辐射噪声以及地面辐射泄漏噪声.一般情况下,天线面、馈源、极化器和接收机4者的噪声级联总和可以用来评估天线微波系统的噪声性能,因为致冷LNA的增益通常可达约30 dB,后级链路的噪声将被弱化1 000倍左右,因此后级链路的影响可以忽略.
本文就射电望远镜系统关键指标——系统噪声温度,介绍了多种系统噪声温度测试方法,并对测量的误差给出了评估;对定标噪声源进行了实测校验,最后测量了4个波段接收系统的噪声温度,并作了一定的分析讨论.
2 测试方法描述
射电望远镜观测过程中,信号的传递和系统噪声温度组成见图1,图中T300和T77分别为黑体300 K和77 K的物理温度,ΓA和ΓR分别表示极化器和LNA的反射系数,PA和PR分别为极化器发出的功率以及LNA实际接收到的功率.系统温度为整个链路中各部件等效噪声温度的级联,简易表示如下:

其中Tsys为整个天线系统噪声温度,Tfeed为常温下馈源网络(包含极化器)插入损耗对应的等效噪声温度;TR为致冷接收机噪声温度;Tsky为来自天空和地球大气的噪声温度,主要从天线方向图的主瓣进入链路;Tgnd为地面辐射泄漏,主要从天线方向图的旁瓣和后瓣进入链路;Tant为天线欧姆损耗,主要由天线反射面损耗导致.需要指出的是,上述(1)式的表达方式并非严格,因为并未考虑级联问题,只有当级联部件的插入损耗小于0.1 dB时可以近似使用,后文的结论表明这种近似算法带来的Tsys误差约为0.035 K左右.
本文主要进行Tsys的测量研究,对Tsky、Tgnd和Tant不作严格分离,但是对Tsky进行了建模分析.此外影响系统噪声温度测量误差的关键问题还有接收链路中的驻波、链路增益非线性和随时间变化等问题,这将在后文深入论述.表1给出了4个频段馈源网络和接收机的关键测试指标.
2.1 天线系统噪声温度测试方法
在cm波段测量天线的系统噪声温度通常采用Y因子法,即先对系统输入1个已知噪声温度的信号,得到1个输出功率;再让系统对向冷空,得到第2个输出功率;两者的比值为Y因子,通过Y因子可以计算出系统噪声温度.对于不同的输入信号,实现手段上有所不同,当前主要采用冷热负载、空间亮温恒定区域以及定标噪声源等作为已知输入亮温,进行测试.
2.1.1 用冷热负载法
在馈源口分别提供300 K(T300)常温和77 K(T77)液氮温度负载[1],见图1.这可以通过把黑体分别置于常温和液氮中来实现上述两个温度负载,记录两个物理温度输入时对应的输出功率的比,得到第1个Y因子如下:

其中T300和T77可以实际测量得到.由此可以计算得到等效噪声温度Tfeed+TR.再移去负载,天线对向冷空,记录系统功率,得到第2个Y因子:

通过(3)式可以得到整个系统噪声温度Tsys,并可以分离得到Tsky+Tgnd+Tant.

表1 4个低频段接收机关键性能测试Table 1 The critical performance tests for the receivers at four low-frequency bands

图1 链路信号传递及系统温度组成Fig.1 The signal transmission and system temperature composition
该方法的突出优点是:由于采用了两个温度负载,可以从系统噪声温度中分离出接收机和馈源网络的等效噪声温度,在X频段以下热噪声随频率分布均匀,因此测量可信度较高.缺点是:T77负载的使用在口径较小的馈源口面非常易于实施,因此在mm波段接收系统中广泛采用,而在卡塞格林结构的cm波段大型射电望远镜系统中,由于馈源口径很大,以TM65 m为例,L、C、S/X的馈源口面尺寸依次为:1.6 m、0.66 m、0.91 m,常用的黑体尺寸通常在0.5 m左右,在常温T300下可以通过多块拼接的方式进行覆盖,但是馈源边沿的泄漏是难以确定的误差量,最大的问题是经液氮浸泡的黑体很难覆盖馈源口面,因为在操作上十分危险.事实上,如果只是为了测量Tsys,则只需要(3)式即可,这得益于Y 2因子通常很大(有10 dB以上),并且Tfeed+TR在实验室通常已经有测量值,后文用于校正噪声源的方法正是基于这一基础.
2.1.2 采用表面亮温度已知的区域
此方法主要采用天空辐射亮温度已知的区域,如月亮、行星[2],对系统温度进行定标,假如在某个区域其辐射亮温为C(温度单位为K),则通过天线指向偏开该区域,可以得到(4)式的Y因子测量值,可以直接测量Tsys,但是不能从Tsys中直接分离Tfeed+TR,除非在馈源口再次覆盖T300的常温黑体.

然而,这个方法也有很大的局限性,月亮和行星的角径较大,在测量大口径天线时,由于波束很窄(65 m天线波束在X波段为140′′左右),几乎是月亮角径(6′)的,所以天线旁瓣同样会接收信号,而导致测量的不确定性.目前在天空中具有确定的已知亮温并且置信度高的区域、频段还比较有限[3].
2.1.3 采用定标噪声源法
这种方法在本质上与冷热负载法一致,并且在cm波段接收系统上应用已经十分普遍[4],一般通过在接收机LNA前端耦合入1个已知噪声温度为Tcal的噪声信号,然后再通过类似于下式的比例式可以计算出系统噪声温度值:

其中Pb为天线指向天空背景时的功率读数;P0为接收系统零点功率读数;Pn为天线指向天空背景时开启噪声源后的功率读数.
采用该方法同样无法从系统噪声温度中分离Tfeed+TR,另外一个主要问题是Tcal定标的准确性,该值通常是在实验室由微波工程师通过噪声分析仪测试后给出,其定标误差估计在0.5~1 K,因此,用此定标值进行系统温度测量时,系统温度越高,测量精度相对就越高,反之亦然.当前4个波段均具备高低两档噪声Tcal注入能力,其典型值和误差情况见下表2,其中是高噪声典型值,是低噪声典型值,是定标噪声的误差量,ErrorH是高噪声的相对误差,ErrorL是低噪声的相对误差.因此当Tcal取高一档时, Tcal值的相对误差较小;而取低一档时,相对误差较大,该相对误差将直接传递给Tsys测量结果.
为了准确确定Tcal值,可以通过采用上述2.1.1节的手段进行校验,详见2.2节,这种校验在实践中是十分可行的,后文实测结果就是采用了校验后的噪声源标定值测得的.此外还有一些测试天线噪声温度的新方法[5−6],这里不再一一展开.
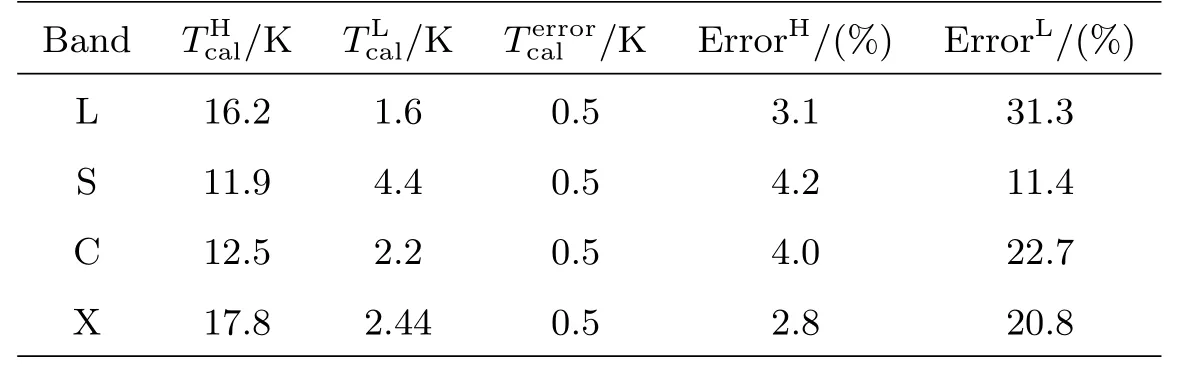
表2 4个波段的定标噪声Tcal及误差Table 2 The calibrated noiseTcaland errors for the four bands
2.2 采用单个常温负载的测量及Tcal反演误差
采用单个常温负载和冷空温度测量系统噪声Tsys,即在图1中可以只采用T300输入时的功率P300和天线接收冷空噪声功率Psky构成Y因子进行测量.后面的分析表明:只要Y因子测量值达到10 dB以上,Tfeed+TR和T300的测量值即使有一定的误差,对Tsys的测量结果也只有约的误差贡献.因此采用该方法反推定标噪声值Tcal有一定的可信度,但是链路必须保证在T300输入时同样工作于线性区,见后文2.3节.
在通常情况下,我们采用定标噪声源法,定义Tsgo和Tsys如下(6)~(7)式,在不同仰角上把天线对准冷空,采用实验室测量获得的接收机噪声温度TR和馈源网络噪声温度Tfeed.天线对冷空,遮盖黑体前后的Y因子为(8)式,当Y因子测量获得后,可以得到Tsgo,见(9)式.
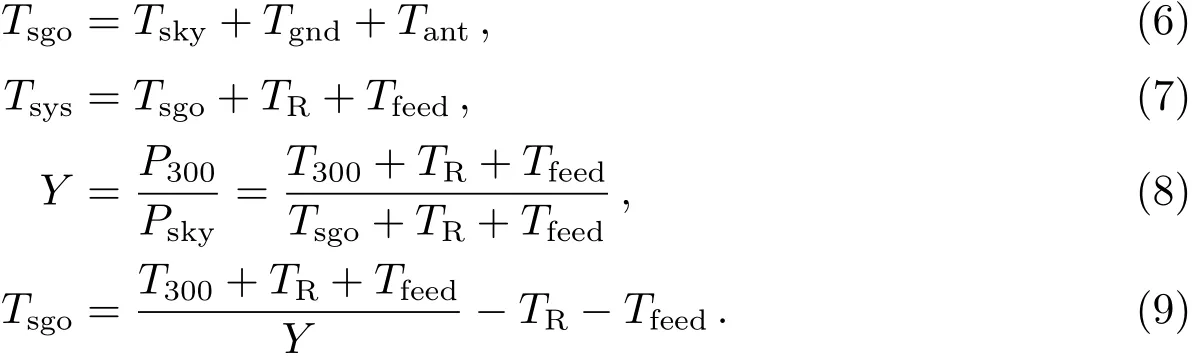
联立(7)式和(9)式,得到Tsys如下:

通常情况下,T300的测量是可以通过温度传感器精确检测,最大只有0.5 K误差,接收机和馈源网络的等效噪声温度TR+Tfeed有实验室测量值可以参考.由表1可知在20 K以下,假定误差为10%,则TR+Tfeed为2 K.如果Y因子为10 dB,在此情况下,此两项对Tsys的测量误差贡献不会超过0.25 K.另外Y因子是直接测量比值,对于线性系统,假设其输出功率的相对波动误差为e,则无论是T300还是Tsky输入,其波动误差将大部分自动消除掉,如(11)式,因此采用该方法得到的Tsys具有较高的可信度,绝对误差估计在0.5 K以内.表3给出了TM65 m上4个波段实际测量时天顶方向的系统温度值及Tcal反演误差情况,与表2中Tcal定标相对误差相比有很大提高,尤其与表2中低一档噪声值的相对误差相比.图2给出了S波段左旋在各个仰角El上采用T300黑体温度和Tsky,获得Y因子测量值后得到Tsys,再反推得到的Tcal值,和实验室获得的Tcal值的对比,Tcal包含两档,分别为大约为系统噪声温度值的50%和5%,可以看到所用的两档高低噪声Tcal值都有很好的符合度,误差不超过0.2 K.尽管表2中S波段低一档的Tcal值理论上有11.4%的误差,但是实际偏差并不大,大约5%.这一方面说明噪声分析仪在S频段的定标误差可能好于0.5 K,估计达到了0.2 K左右;另外一方面说明采用上述反演方法的合理性.


表3 天顶方向Tcal反演误差Table 3 The reversion error ofTcalin the zenith direction

图2 S波段实验室定标温度值和Y因子法反演得到的Tcal值对比Fig.2 The temperature ofTcalcalibrated in the laboratory at S band vs the reversed value ofTcalwith the Y factor method of blackbody absorber
2.3 非线性验证
在实际测量中,接收机和中频链路工作处于线性范围区是非常重要的,如果链路进入饱和区,将对测量结果带来很大的偏差.采用(10)式计算系统噪声温度Tsys时,已经假设Y因子的获得是线性系统上测量得到的,如果系统进入非线性区,Y因子的测量就必然带来误差,即使避免了饱和区,小量的非线性同样会导致测量误差.因此,在测试过程中必须验证T300输入时,链路并未进入饱和区,如果发现链路有饱和现象,可以调整接收机和中频链路各级的衰减值,使链路进入线性工作区.图3为X波段调整好链路增益后,测量各个俯仰角上Tsys+Tcal多个输入值及其输出功率,因为在16个仰角位置上进行了测量,所以共有48点,然后进行线性拟合,并把拟合线延长至300 K黑体覆盖时,输入T300+Tcal,由此可以检查系统的非线性特征以及合理性.与此比较,图4为链路处于饱和工作区的情况,可以看到在T300输入时,输出功率被严重地压缩,T300输入时明显不是处于线性工作区,因为其线性拟合线都没有经过功率零点.图3~4中拟合的斜率有较大差别是因为链路的增益不同,后者的增益太大导致了T300输入时链路进入了饱和区域,由此导致Y因子测量误差取决于图4中的压缩量δ=6353.根据(10)式,可知当前Y因子误差为相对误差为其中P300为线性情况下T300输入时的功率读数,这个误差最终体现在Tsys的测量结果上就是Tsys比实际大了36%,因此在进行T300黑体覆盖测量时,必须确认接收链路工作于线性区.

图3 接收链路处于线性工作区Fig.3 The receiving link in linear work areas
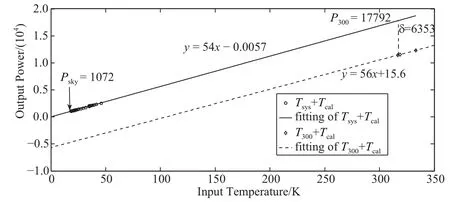
图4 T300输入时接收链路处于饱和工作区Fig.4 The receiving link in saturation work areas with theT300input
2.4 馈源网络插入损耗和失配导致的误差
2.4.1 馈源网络插入损耗对近似算法的误差影响
由于馈源网络插入损耗的存在,其与致冷LNA的级联可以简化为放大器前串入有耗传输线的典型模型,见图5.假设馈源网络的插入损耗为L(dB),对应的增益为G1=1/(10L/10)则等效噪声温度为致冷LNA的等效噪声温度为TR,由此两者组成一个整体后,在接口完全匹配情况下,该模块的等效噪声温度为:

由此可以与前述近似算法=Tfeed+TR作比较,当前4个波段的馈源网络插入损耗普遍小于0.1 dB,由此可以得到简易算法的计算误差与接收机噪声的关系,见图6.根据表1中接收机噪声指标,可知4个频段接收机实际的噪声均小于15 K(L、C以及X波段即使包含极化器也小于15 K),近似算法误差小于0.35 K,在Y因子为10 dB的情况下,由此导致的Tsys测量误差为0.035 K,见(10)式.因此,采用(1)式的近似表达式,对系统噪声温度Tsys的测量误差不会超过0.1 K.

图5 LNA前串入有耗传输线Fig.5 The lossy transmission inserts before LNA

图6 接收机噪声温度近似算法误差Fig.6 The error of the receiver’s noise temperature with the approximation algorithm
2.4.2 馈源网络和接收机失配对误差影响
这里将对图1中的极化器和致冷LNA间的失配导致的噪声抬升进行分析,定义失配系数MAR为极化器发出功率PA和低温LNA实际收到功率PR的比值[7],如下:

其中ΓA为极化器输出口的反射系数;ΓR为致冷LNA输入口的反射系数.
通常情况下,ΓA和ΓR的相位关系不会测量,而用MAR的最大值和最小值来表示,如果用回波损耗参数S11表示反射系数,将
代入(14)式,由此表示失配系数的最小Mmin和最大值Mmax分别如下(15)~(16)式,其中SA和SR分别表示极化器输出口和致冷LNA输入口的回波损耗.图7给出了极化器输出口回波损耗S11=−22 dB典型值情况下,此时的电压驻波比VSWR=1.173,致冷LNA输入口回波损耗与最大、最小失配系数的关系.
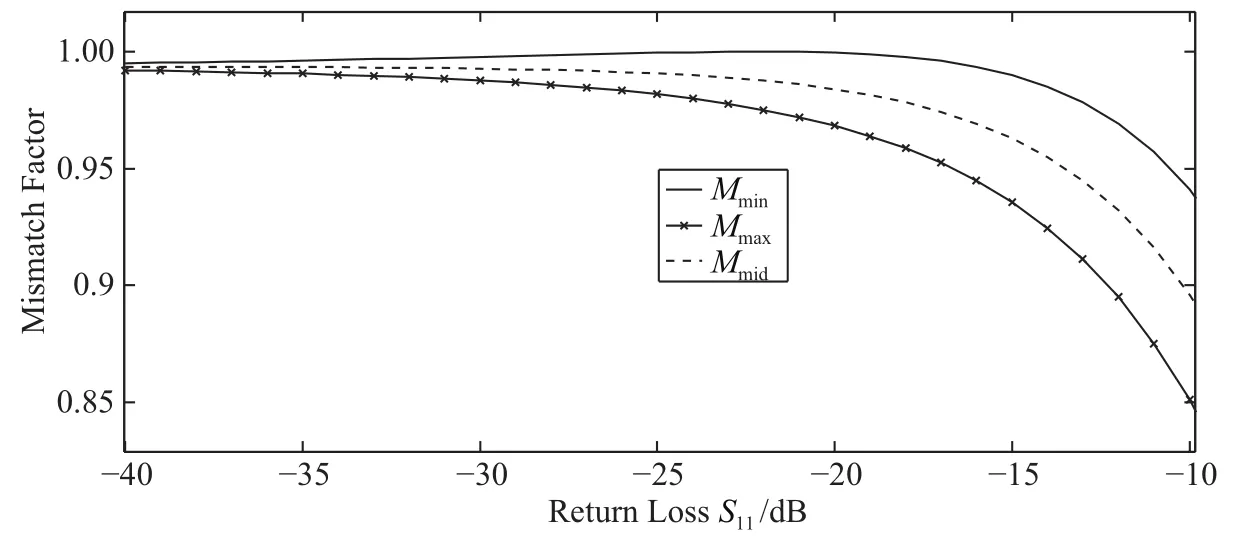
图7 失配系数与LNA的回波损耗关系Fig.7 The mismatch factor vs return loss of LNA
图8给出了黑体T300温度从极化器传递到致冷LNA时,通过失配系数关系式(17)式作用后,LNA实际接收到的温度值,此时极化器输出口回波损耗S11=−22 dB,电压驻波比VSWR=1.173.可以看到,在回波损耗达到−10 dB时,由于失配系数明显增大,在最大失配情况下,LNA实际收到的温度T300只有255 K,相对损失达15%;即使取中间失配系数,可以达到T270,相对损失为10%.
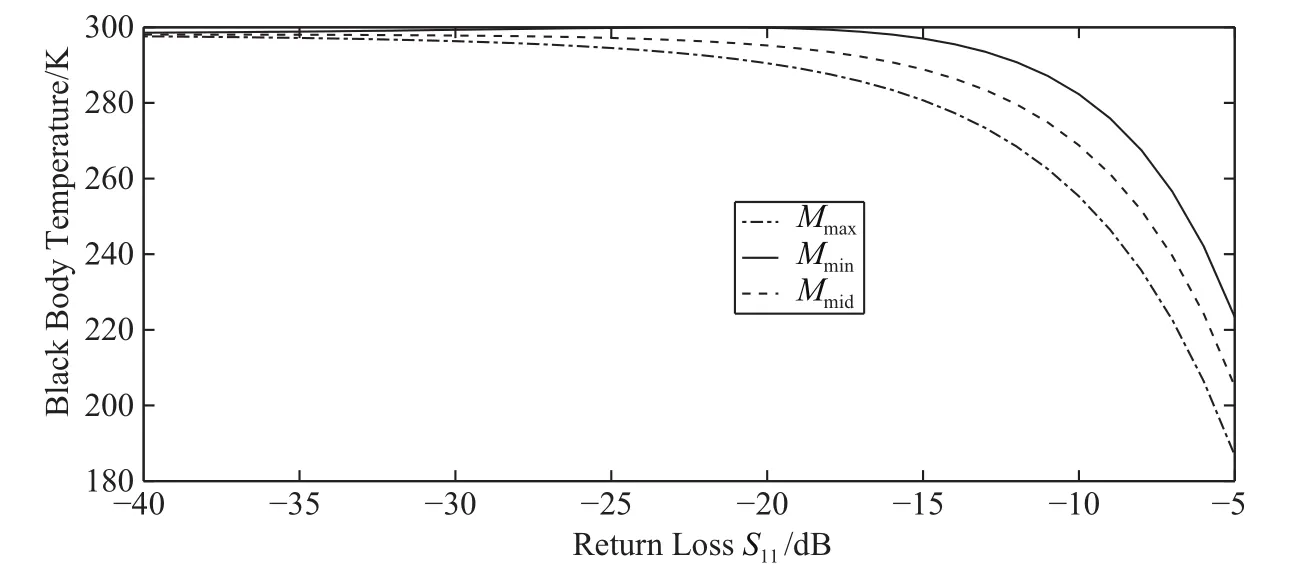
图8 失配系数对T300输入的影响Fig.8 The mismatch factor vsT300input
表4给出了TM65 m上4个波段实际测量时,结合表1中的回波损耗参数,采用T300常温负载测量法,只考虑极化器和LNA间的驻波,并估计Y因子为10 dB时,计算失配系数导致的系统温度测量误差情况.可以看到,失配导致的噪声基本在1 K以下,如果系统噪声本身很低(比如C波段),失配系数导致的相对误差明显增大.
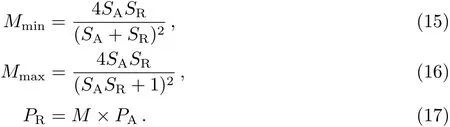

表4 失配系数导致的系统噪声测量误差Table 4 The measurement errors of the system noise temperature from mismatch factors
2.5 负载噪声温度的频率相关性
上述采用了黑体的物理温度直接代入公式是一种近似,黑体的辐射温度与频率实际是相关的[8],严格的噪声标定公式见(18)式.(19)式为采用近似算法的误差公式,可用于高频测量时校正.图9给出了T=300 K负载情况下,采用近似物理温度在不同频率上的误差分布,可见随着频率的上升,误差将加大,在X频段8 GHz以下时,这个误差只有0.2 K左右,只有在系统噪声温度本身很低(几K量级)或高精度测量时需要予以考虑.而到Ka频段38 GHz时,这个误差将接近1 K,在高精度测量情况下应当考虑.
其中h为普朗克常量6.6262×10−34;f为工作频率;k为玻尔兹曼常数1.3806488×10−23;T为物理温度;TN为与频率相关的黑体辐射温度;TC为近似算法的误差.

图9 噪声温度近似算法误差随频率变化情况Fig.9 The error of the temperature noise with the approximation algorithm vs frequency
2.6 链路增益变化问题
接收机链路的增益变化会带来不可预料的测量误差,尤其是短周期的增益变化.目前的测量方法采用了分时开关噪声源的方法,开关时间均为4~5 s,如果在开启噪声源时间内增益是稳定的,而在关闭噪声源测量时间内增益发生了突变,则直接导致测量的不确定性.
为了避免此类问题,可以采用如下两种手段:(1)测试前需对链路功率进行较长时间的检测.(2)采用周期开关噪声源的方法,开关频率在赫兹级别,这样可以在更短的时间内进行测量,然后进行积分处理,以平滑由于增益缓慢变化导致的功率检测误差.
2.7 大气亮温数学模型
从上面的论述可以看到,要从Tsys中分离出Tsky+Tgnd+Tant必须具备两个温度负载作为输入量.然而,即使如此,天空亮温Tsky的单独分离依然是困难的.一般情况下可以通过水汽辐射计测量或采用模型计算方法[5]估算Tsky.已有的经验表明,高的大气衰减可以导致大气亮温的数倍增加,视线方向的水蒸汽含量起伏只有在高水蒸汽含量的情况下可以忽略.天顶方向的大气亮温最小,因为在这个方向天线波束包含的大气体积最少.大气亮温随天线波束宽度的增加而增加,小口径天线比大口径天线的要高,因为这两个天线波束包含的空气体积大小不一样[9].
(20)式是计算大气亮温的数学模型[5],图10是TM65 m射电望远镜50 GHz以下,在不同天顶角上大气亮温的辐射曲线,其中已经包含了2.7 K宇宙背景辐射以及银河系辐射.输入的参数为天线位置的海拔、温度、湿度和气压参数.

其中Tb0(ν)为宇宙背景辐射导致的亮温;ν为频率;ka(ν,s)为大气吸收系数;τν(0,s0)为大气透明度(或称光深);s为距离;T(s)为温度.

图10 对不同天顶角采用模型计算的天空辐射亮温Fig.10 The sky brightness temperature calculated with the model for di ff erent zenith angles
3 TM65 m L、S、C和X波段系统噪声温度分析和测试结果
采用图1中的参数以及2.2~2.4节所述校准方法,并采用图10中天顶方向的大气亮温曲线,分别估算了4个波段的天顶方向系统噪声温度,见表5.
同时我们对L、S、C和X 4个波段采用定标噪声源法测量了在各个俯仰角的系统噪声温度,并对数据进行了校准处理.其中除了L波段为线极化外,其余波段均为双圆极化,测量结果分别见图11~12,可以看到各个波段在高仰角位置的系统噪声温度依次为28 K、50 K、17 K和28 K左右,除了S波段,其余波段的实测结果与表5中估计值符合良好,差别主要来源于以下几方面:(1)地面噪声泄漏以及天线反射面损耗噪声估计有误差;(2)馈源网络的噪声是由常温下测试插入损耗转换得到的,在实际工作中L、C和X 3个波段的极化器处于低温状态,因此严格意义上,其噪声与常温下有所差别;(3)大气辐射噪声是由数学模型计算获得的,并非实测值;(4)测量Y因子时,黑体覆盖馈源并未考虑馈源口噪声泄漏;(5)L和S波段的测试曲线的弥散比C和X波段要大些,这是因为L和S波段在某些仰角上测试时有无线电干扰信号存在,而C和X波段则不存在此类问题.
图11给出了L波段和S波段的系统噪声温度随俯仰角的变化情况,其中L波段为线极化接收,包括水平极化(L-CH1)和垂直极化(L-CH2),测试频点为1.527 GHz,测试带宽为5 MHz;S波段为左右旋接收,左旋极化为S-LCP,右旋极化为S-RCP,测试频率为2.285 GHz,测试带宽为20 MHz.从图11中可以看到S波段的系统噪声在每个俯仰角上明显偏高,根据表1中S波段的微波链路性能以及图10中天顶方向的亮温曲线,则S波段的系统噪声温度预计在24.2 K左右,实测结果比理论设计高出了约26 K.对于TM65 m天线, S/X是双频馈源,在X波段Tgnd和Tant估计值均为1 K,并且与实测符合良好,我们暂时认为S波段的空间无线电干扰导致了整个噪底的抬升,致使Tgnd与理论严重不符,深入的分离研究和实测工作将在后面开展.图12给出了C和X波段左右旋系统噪声温度随俯仰角的变化情况,其测试频率分别为4.9 GHz和8.4 GHz,测试带宽均为20 MHz,可以看到在天顶方向,其实际测试结果分别为17 K和27 K左右,与表5中的估计值相当.

表5 4个波段在天顶方向的系统噪声温度估计Table 5 The system noise temperature estimations of the four bands in the zenith direction
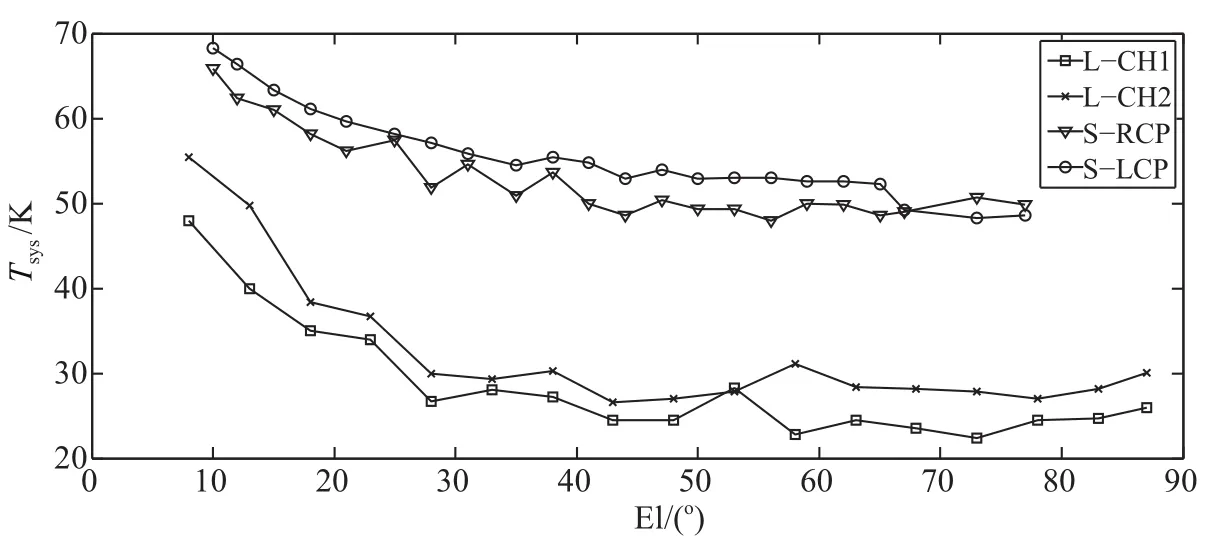
图11 L波段和S波段系统噪声温度随俯仰角变化情况Fig.11 The system noise temperatures for L and S bands changing with elevations
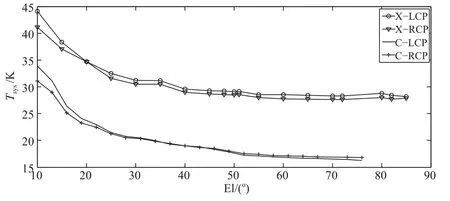
图12 C和X波段系统噪声温度随俯仰角变化情况Fig.12 The system noise temperatures for C and X bands changing with elevations
致谢感谢南京大学天文与空间科学学院郑兴武教授对论文写作上的指导.
[1]Rochblatt D,Richter P,Withington P,et al.IPNPR,2007,42:169
[2]Barrs J W M.ITAP,1973,21:4
[3]Williams D R W.A&AS,1973,8:505
[4]Schuster D,Stelzried C T,Levy G S.IREAP,1962,49:286
[5]Medell´ın G C.Antenna Noise Temperature Calculation.SKA Memo 95,2007:1
[6]Weinreb W A,Weimeb S,Mani H.IEEE Aerospace Conference,2007:1-2
[7]Otoshi T Y.IPNPR,2002,42:148
[8]Stelzried C T.TDAPR,1992,42:111
[9]Rohlfs K,Wilson T L.射电天文工具.姜碧沩,译.北京:北京师范大学出版社,2008:146
Measurements and Analysis of System Noise Temperature of the Low-frequency Bands for the TM65 m Radio Telescope
WANG Jin-qing1,2YU Lin-feng1,2ZHAO Rong-bing1,2JIANG Dong-rong1,2LOU Fang-xun1,2,3LAO Bao-qiang1,2,3LI bin1,2DONG Jian1,2FAN Qing-yuan1,2QIAN Zhi-han1,2LIU Qing-hui1,2JIANG Yong-bin1,2
(1 Shanghai Astronomical Observatory,Chinese Academy of Sciences,Shanghai 200030)
(2 Key Laboratory of Radio Astronomy,Chinese Academy of Sciences,Nanjing 210008)
(3 Guilin University of Electronic Technology,Guilin 541004)
We fi rst present the noise characteristics of the receiving systems including L,S,C,and X bands for the TM65 m radio telescope.The measurement methods for the system temperature have been discussed.The important in fl uences,including the non-linearity error,feed network insertion loss,mismatch errors,and so on for measuring the system noise temperature are analyzed.We have measured the system noise temperatures in four bands with both of the calibrations of noise sources and black body in room temperature.We have estimated the temperatures of the noise sources and compared them with the laboratory values.The di ff erence is around 0.2 K.Finally,the system temperatures of the four bands are measured and analyzed.
atmospheric e ff ects,techniques:radar astronomy,cosmic background radiation
P111;
A
10.15940/j.cnki.0001-5245.2015.01.008
2014-03-26收到原稿,2014-07-03收到修改稿
∗国家自然科学基金项目(11303076)资助
†jqwang@shao.ac.cn