电铲工作装置机构优化设计的研究*
2015-06-24李奎贤韩维国
邹 伟,李奎贤,周 航,韩维国
(1.昆山三一数字科技有限公司, 江苏 昆山市 215300;2.东北大学 机械工程与自动化学院, 辽宁 沈阳 110819)
电铲工作装置机构优化设计的研究*
邹 伟1,李奎贤2,周 航1,韩维国1
(1.昆山三一数字科技有限公司, 江苏 昆山市 215300;2.东北大学 机械工程与自动化学院, 辽宁 沈阳 110819)
以矿山测试为基础,结合采矿工艺、基于挖掘轨迹的思想,建立准确的数学模型,为后继的制动器等参数计算打下基础。根据实际工况确定了多目标函数和约束函数,运用序列二次规划法进行优化,给出合理的机构参数,对此类设计具有实用性指导意义。
电铲;工作装置;机构优化
电铲是露天矿山开采系统中的关键设备。随着国内外露天矿山生产规模的日益扩大,装备技术和采掘水平逐渐提高,对露天采装设备尤其是电铲的设计提出了更高的要求,而工作装置的设计优化在电铲性能提升中起到最根本的作用。李奎贤等对挖掘轨迹进行了研究,证明可以用对数螺旋线描述挖掘轨迹,并进行机构优化[1-3]。卢雄伟和申军立对工作装置优化设计进行了初步探讨[4-5],马乐等对工作装置进行了仿真分析[6-7],韦宝琛探讨了双斗杆工作装置性能[8]。本文的主要工作是结合采矿工艺、基于挖掘轨迹的思想,从给定料堆形状出发,根据挖掘轨迹建立数学模型,依据使用工况确定目标函数和约束函数,运用序列二次规划法进行优化,给出合理的机构参数。在优化过程中考虑了不同的停机位置,为后继设计打下坚实基础。
1 数学模型
前提条件1[1]:电铲在挖掘时,铲斗在推压机构和提升机构同时作用下,斗尖的挖掘轨迹认为是近似等后角对数螺旋线,其挖掘轨迹的初始矢径ρ0、有效转角θ(弧度)及瞬间矢径ρ关系为ρ=ρ0·ekθ。式中k值为斗尖矢径与轨迹切线夹角δ的余切值,即k=cot(δ)。
前提条件2:认为料堆断面是与地表呈α角的斜平面。
1.1 设计变量
图1中给出了9个设计变量,第10个设计变量为斗尖挖掘轨迹对数螺旋线的k值。
1.2 目标函数
确定目标函数的主要原则是能耗最小,选多目标函数。
(1) 提升功最小。提升功是指在斗杆转角的范围内,有效提升力与钢丝绳缩短量的乘积。
(1)
式中,Fty(j)为挖掘过程的有效提升力;ΔHOIST(j)为挖掘过程中钢丝绳的收缩量;Fty_2(j)为铲斗装满后提升过程中的提升力;ΔHOIST_2(j)为铲斗装满后提升过程中钢丝绳的收缩量。
(2) 推压功最小。推压功是指在斗杆转角的范围内,有效推压力与斗杆推出量的乘积。
(2)
式中,Ftuiy_2(j)为挖掘过程的有效推压力;ΔO1E(j)为挖掘过程中斗杆的推出量。
总目标函数是分目标函数的加权和:
(3)
加权系数wm采用指标容限法确定。
1.3 约束方程
优化变量的上下限约束共20个,根据电铲设计理论、结构限制和经验确定;挖掘物料体积的约束在0.8~1.1倍标准斗容之间;挖掘后角约束在30°以内;约束挖掘结束时矢径ρ在斗杆全部推出时的矢径长之内;推压轴中心距地面的距离约束在合理范围内。总计26个约束方程,统一写为Gn(x)≤0的形式。所以数学模型可写为:

(4)

图1 设计变量
2 优化结果
2.1 优化算法选择
目标函数为指数函数和三角函数的混合函数,自变量有10个。大量计算表明,此函数使用惩罚函数法优化须处理设计变量到达可行域边界的问题,使用复合形法优化效率很低而且复合形容易退化,遗传算法又容易陷入局部最优解,序列二次规划法效率高而且结果最好,所以选用序列二次规划法。
2.2 加权系数求解
首先通过单个目标函数优化计算,确定单目标函数的上下界为αm、βm,可得加权系数为:
(5)
2.3 优化结果
以35 m3斗容电铲为例,堆料角为40°,选取适当的停机位置,优化结果见表1,优化前后机构特性对比见表2。
3 不同停机位置下机构特性与做功
当机构尺寸和结构参数确定后,停机位置和挖掘轨迹对机构效率有影响。以40°堆料角为例,计算结果见表3。
从表中数据可以看出,对数螺旋线k值有明显变化时,机构受力和做功无明显变化,只是连杆力变化明显。因此可以推断,当挖掘条件差异较大时(堆料角、挖掘厚度等),铲斗受力差异较大,应设计不同规格的铲斗以适应不同物料条件下的挖掘工作。

表1 优化结果

表2 优化前后机构特性对比

表3 不同停机位置下机构特性与做功
4 计算公式正确性验证
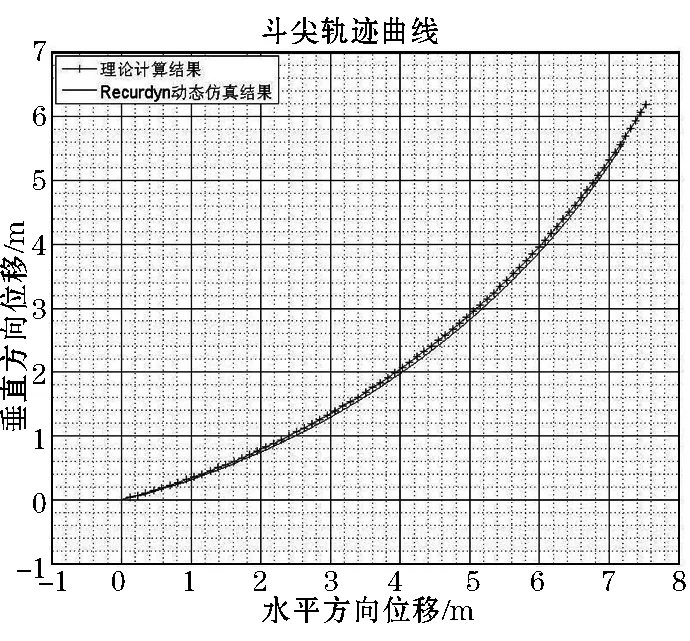
图2 斗尖轨迹对比曲线
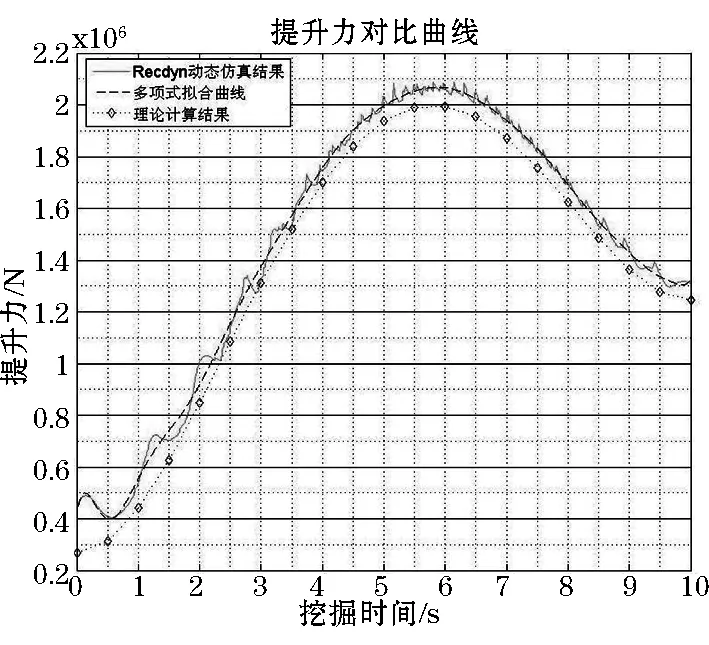
图3 提升力对比曲线
以40°堆料角、常用停机位置为例,将理论计算结果和Recdyn动态仿真结果对比。在Recdyn中输入推压和提升位移表达式以及各重力和挖掘阻力表达式,求得各力学参数和运动参数。对比结果如图2~图4所示,容易看出理论计算和动态仿真结果吻合良好。
5 结 论
(1) 基于挖掘轨迹的思想,建立了可靠的数学模型,并验证了数学模型的正确性。
(2) 进行了优化算法探索,选出最适合的优化算法并得到合理的优化结果,机构做功有明显下降,建议取优化结果进行后继设计。
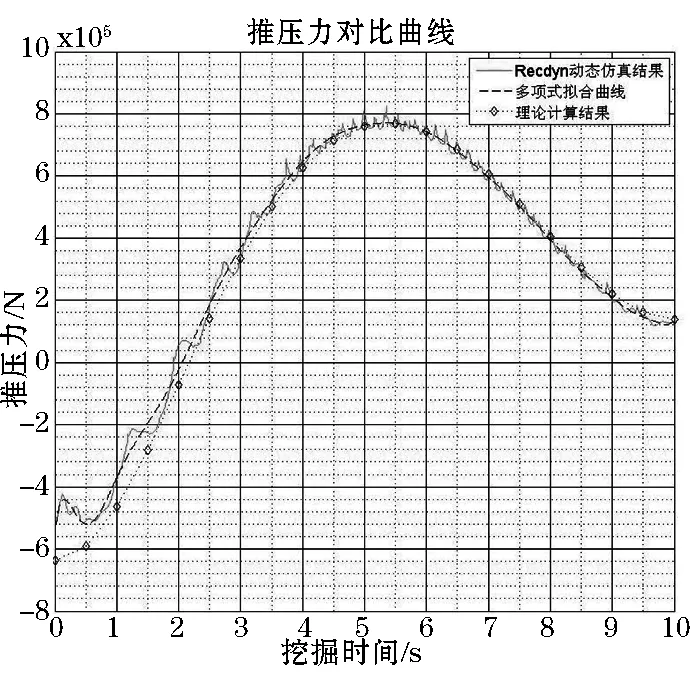
图4 推压力对比曲线
(3) 考虑不同的停机位置,计算结果表明机构对不同挖掘轨迹和位置适应性良好。
[1]李奎贤,王新中,邹宜民.合理挖掘轨迹的确定及意义[J].矿山机械,2000, 28(8): 14-15.
[2]李奎贤.4 m3正铲机机械式挖掘机工作装置的几何参数优化[J].矿山机械,1985, 10: 13-19.
[3]李奎贤,宋桂秋,彭武良,等.挖掘过程及机械参数优化设计[J].东北大学学报,2001, 22(3): 271-274.
[4]卢雄伟.8 m3矿用挖掘机工作装置优化设计及结构强度分析[D].吉林:吉林大学,2009.
[5]申军立.机械式挖掘机工作装置机构性能研究与优化设计平台研发[D].吉林:吉林大学,2013.
[6]马 乐,赵克利,翟洪岩.大型矿用挖掘机工作装置仿真[J].计算机辅助工程,2006,15(S1), 361-363.
[7]邸丽伟,孔德文,白 雪.基于虚拟样机技术的机械式矿用挖掘机工作装置参数优化设计[J].建筑机械,2013(1), 78-82, 86.
[8]韦宝琛.巨型电铲新型工作机构性能研究[D].上海:上海交通大学,2012.
三一集团里程碑项目(L2013SYZJ031X-01).
2014-08-04)
邹 伟(1985-),男,江苏人,硕士,电铲新产品项目经理助理,Email: zouwei2010@126.com。
