一种基于艇载测量系统的目标RCS动态测量方法
2015-06-23张政超李文臣袁翔宇
张政超,李文臣,袁翔宇,林 欢
(中国洛阳电子装备试验中心,洛阳 471003)
工程与应用
一种基于艇载测量系统的目标RCS动态测量方法
张政超,李文臣,袁翔宇,林 欢
(中国洛阳电子装备试验中心,洛阳 471003)
在简要介绍目前RCS测量的基本测量思路的基础上,建设了一种基于艇载测量系统(主要包括矢量网络分析仪、天线馈线、功率放大器等),详细论述该测量系统的测量方法和工作流程。另外分析了定标体的选择、目标RCS测量过程中相关坐标的变换以及光电引导设备对目标的引导过程和误差计算过程,并且阐述了该RCS测量系统的误差分析和数据处理过程。该RCS测量系统和测量方法已应用于实际相关领域的目标RCS测量,应用表明,该测量系统和测量方法能对目标在指定频率范围内多俯仰角、多方位角进行RCS测量,为装备研制、试验提供参考。
艇载测量系统;目标RCS;动态测量
0 引 言
目标的雷达横截面积(Radar Cross Section)是表征雷达目标对于照射电磁波散射能力的一个物理量[1]。武器装备的隐身设计、材料选择与应用、效能验证等都离不开隐身测试技术,而要准确获取测量数据,真正反映武器装备的目标特性,就需要测试场等硬件条件来支撑。国外很早就重视对隐身测试场的建设与发展,建设了系列测试外场和内场,如美国在全国各地建了数十个雷达隐身性能(RCS)测试外场,另外法国、德国等也都建立了相应的RCS外场测量设施[2-3]。
对于目标RCS的测量思路大致分为两类:一类是基于电磁散射理论的观点,通过计算目标的等效面积与入射功率密度的乘积(假设平面电磁波照射,散射各向同性)[4-5],另一类是基于雷达(或矢量网络分析仪)测量的观点,通过雷达方程推导出目标RCS与定标体RCS之间的线性关系,从而得出测量结果[6-9]。对于第二种获取目标RCS特性的方法,研究人员开发了大量的测量系统[10-11],在这些测量系统中,通过对RCS测试方法中的单点频(连续波)与宽带扫频测试研究,可以看到点频测量方法所得的结果不能全面反映目标的散射特性,并且分辨率和精度受到限制。而利用宽带扫频技术对目标的RCS特性进行分析,能够全面反映目标的散射特性,且可以提高测量精度和目标分辨率,进而拥有广泛的应用前景[12-13]。
基于目标的运动特性,RCS及其频率响应可分为大气层内目标(各类飞机、空地导弹、巡航导弹、自然目标)、大气层外目标(弹道目标、各类卫星、轻重诱饵)、海面目标(各类舰船、航空母舰)、地面目标(坦克、装甲车等人造目标)[1]。因此对这些目标的RCS的测量方式也不尽相同,目前采取的方式主要是测量系统基本固定,通过转台和支架调整被测目标的姿态,从而得到被测目标在不同的电磁波入射角度、不同的入射频率条件下的RCS特性。然而这种测量方式对于较小较轻的目标比较合适,对于较重且不易变换姿态的目标,这种方法则不尽能有效。
基于此,对于这类目标,本文考虑将其基本固定,通过用飞艇加载矢量网络分析仪、光学引导设备、GPS测量系统等,利用飞艇飞行时相对目标的不同角度,测得目标相对于定标体的功率关系,从而解得电磁波不同入射角度下的目标RCS特性。
1 测量系统
对于目标的RCS测量主要有动态和静态的方式。静态测量主要针对易于改变姿态(方位角、俯仰角)的目标,而动态测量则针对于不易改变姿态的目标。动态测量的难点在于测试系统的位置控制、时空对准、精度控制等,影响其精度的因素主要来源于测量系统的测量精度(需进行内标定)和多径效应(需进行外标定)。
升空测量系统包括飞艇、艇载部分和地面部分。艇载部分主要由微波矢量网络分析仪、微波功率放大器、发射/接收天线及伺服、信号采集控制及处理系统、电源等附属设备组成;地面部分主要包括地面简易操控台、RCS测量标校系统等。飞艇载RCS测量系统如图1所示。
2 测量方法及流程
外场开阔场测量时,采用飞艇挂飞测量中高仰角的方式对被测目标进行RCS测量,获取多个仰角切面RCS数据,统计同仰角切面数据作为该仰角目标RCS平均值,并给出俯仰RCS均值起伏特性,以及目标RCS均值。测量过程包括试验设计、数据录取、数据处理、结果显示等四部分。目标RCS测量方法及流程如图2所示。

图1 系统原理示意图

图2 目标RCS测量方法及流程
(1)试验设计
试验设计阶段包括设计飞行航线、地面定标体的摆放位置、地面引导装置的布设等。
飞行航线的设计中,根据地面目标的经纬度、高度,选取合适的飞行距离和高度,解算出目标飞行的经纬度和高度信息,试验飞行航线设计如图3所示;地面定标体则根据飞行航线中测量系统的不同入射俯仰角度适时调整姿态(俯仰角),以确保电磁波入射的角度在达到定标体的RCS最大值时的入射俯仰角;地面引导装置则是在被测目标周围摆上明显的标志物体,以引导光电摄像头实时对准被测目标。
(2)数据录取
飞艇加载矢量网络分析仪后,在飞行前矢量网络分析仪即开机工作,连续测量被测目标的回波信息并存储,以备于RCS数据处理。数据录取时,矢量网络分析仪接收到的信号强度为频域上对应的复信号,经逆傅里叶变换后,得到时域上对应的电压强度U(V),按下式转化为功率强度P(dBmW):

图3 试验飞行航线设计示意图

其中,R为匹配电阻,为50Ω。若测量信号为步进频信号,其时域分辨率Δr为:

其中,c=3×108m/s;f2为步进频终止频率;f1为步进频起始频率。
(3)数据处理
数据处理阶段分为3部分:光电平台引导、GPS数据录取及转换、目标RCS计算。
光电平台引导数据录取的包括被测目标相对于飞艇的时间、方位角、俯仰角;GPS数据录取及转换包括飞艇的实时经度、纬度、高度、滚转角、俯仰角、方位角等;目标RCS计算则是在同一高度层(± 2.5°)上不同方位角下的RCS特性。
(4)结果显示
RCS结果显示是将数据处理中的被测目标RCS值进行剔除野点、方位角度选取、滑窗平均处理,最终显示表现RCS特性的图形。
3 定标及坐标变换
3.1 定标
基于雷达(矢量网络分析仪)测量目标RCS的本质是测量目标回波信号大小,定标体可选择标准球、标准角反射体等,选取标准角反射体时,需对其进行标定,并确保定标时电磁波入射方向为其RCS值达到最大时的方向。
3.2 坐标变换
航线的设计的过程中,先确定满足测量远场条件的飞行距离和高度,然后根据目标中心点的经纬度和高度计算其大地直角坐标,然后根据飞行轨迹相对目标的站心坐标,解算出飞行轨迹大地直角坐标,最后得出飞行轨迹的经度、纬度、高度。其坐标转换流程如图4所示,飞行航迹的经纬度转化为站心坐标结果如图5所示。
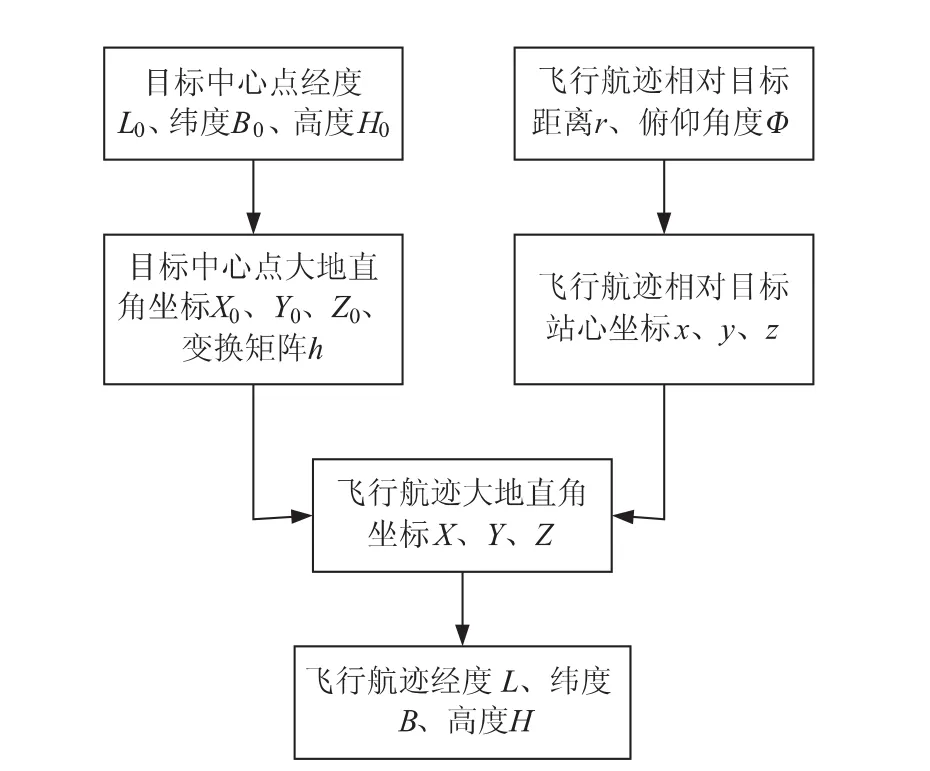
图4 飞行航线设计中的坐标转换流程示意图

图5 飞行航迹的经纬度转化为站心坐标结果图
艇载GPS测量系统测得飞艇飞行的经度、纬度、高度后,还需将其转换为以被测目标为中心的新坐标。坐标转换主要包括经纬度转化为大地直角坐标、大地直角坐标转化为经纬度、大地直角坐标转化为站心相对坐标等。
(1)经纬度转化为大地直角坐标
对同一参考椭球,设地面一点的空间大地直角坐标为X、Y、Z,大地坐标为L、B、H,那么
(2)大地直角坐标转化为经纬度
将经纬度转化为大地直角坐标相对简单,将大地直角坐标转化为经纬度则相对复杂,经纬L可以由(4)式求得:

纬度和高度则需经迭代循环求得,迭代的初始值为:

循环过程为:

高度由下式求得

(3)大地直角坐标转化为站心相对坐标
若已知P、Q两点的大地直角坐标为P(XP,YP,ZP),Q(XQ,YQ,ZQ),将Q点大地直角坐标转化为以P点为原点的站心坐标计算如(8)式:
其中h为转换矩阵,根据P点的经纬度(LP、BP)可以解出:3.3 光电转台引导精度

光电转台根据飞艇的姿态,解算出被测目标相对于转台的方位角θ1和俯仰角φ1;根据飞艇载的惯导录取的飞艇实时滚转角 θx(右下为负,左上为正)、俯仰角θy(下为正,上为负)、方位角θz(左为正,右为负)及GPS测量获得的飞艇实时空间位置(经度、纬度、高度),可以计算得到飞艇相对被测目标的站心坐标(x′,y′,z′):

其中:

根据(x′,y′,z′)便可求得飞艇相对被测目标的方位角θ2和俯仰角φ2,由方位角θ1和俯仰角φ1、方位角θ2和俯仰角φ2可求得光电转台的引导精度。光电转台的引导计算如图6所示。

图6 光电转台引导精度解算示意图
4 数据处理、误差分析及结果
4.1 数据处理
4.1.1 数据预处理
根据飞艇航线位置姿态数据、伺服系统角度指向数据、电视跟踪数据综合评估测量系统天线指向误差,评判测量数据有效性。当飞艇航向通过标准角反射体最大RCS方向指向位置时,可以获取标准目标最大回波强度,该回波强度作为标准目标的回波强度。
4.1.2 目标RCS数据处理
目标RCS数据处理如下:
(1)被测目标或标准目标(角反射体、金属球)回波通过IFFT获取目标一维距离像,并经过时域目标提取(时域滤波)、测量距离修正处理、FFT得到目标频域测量数据。
(2)计算各频率对应的待测目标RCS测量数据。根据雷达方程,待测目标在某角度θ频率f的RCS表示为:

其中pt(f,θ)为待测目标某角度θ频率f对应的回波强度,p0(f)为标准目标频率f对应的回波强度,标准目标各角度回波强度相同,pt(f,θ)和p0(f)均为时域滤波后的频域测量数据;r0t、r0r为标准目标距离发射天线和接收天线的距离,rtt、rtr为被测目标中心距离发射天线和接收天线的距离;σ0为标准目标RCS;Gt为待测目标方向的测量天线增益,G0为标准目标方向的测量天线增益,解算RCS时假定Gt≈G0。
(3)选取被测目标指向±60°范围内的目标回波测量数据,分别得到不同方位角被测量目标RCS。
(4)参考《GJB3830—99目标雷达散射截面数据格式要求》、《GJB6180—2007空中目标雷达散射截面动态测量方法》,选取合适的窗口长度、滑动步长,得到不同俯仰角度、不同方位角度下电磁波入射得到的被测目标RCS特性。
4.2 误差分析
假设各误差是独立的,对(11)式求偏导,则被测量目标的RCS的相对测量误差的均方根为:


测量信噪比引起的误差为随机误差,SNR引起的随机误差分布曲线如图7所示,当测量信噪比SNR为15 dB时,随机误差引起的相对测量误差均方根约为0.2 dB,按照矢量叠加原理,相对测量误差最大值约为1.7 dB。
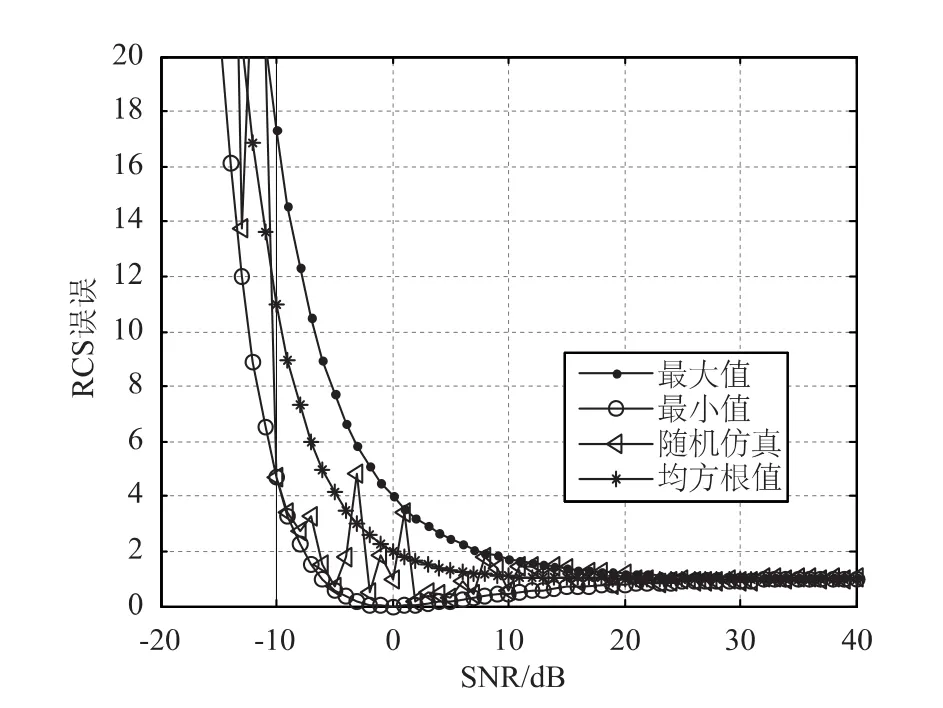
图7 SNR引起的随机误差分布曲线
4.3 测量结果
利用本文开发的艇载测量系统对某目标测得的俯仰方向的目标RCS均值如表1所示。

表1 俯仰方向的目标RCS
从表1可以看出,待测目标在各高度层内的一定方位范围内的RCS值比较平稳,在预计的测量范围之内。
5 结 语
基于飞艇载测量设备的测量系统可以对地面固定被测目标从不同的俯仰角和方位角进行测量,得到被测目标的RCS特性。测量的关键技术包括飞行航线设计、数据录取、数据处理和标准体定标等。本文设计的测量系统已成功应用于地面某待测目标的RCS特性测量,并可推广应用于类似需求的目标的RCS特性测量。
测量的过程中,标准体的定标至关重要,可以通过对标准球的标校,再对定标体进行传递定标,从而得到定标体最大RCS;在实际测量中,可以在被测目标附近放置多个大小不一的定标体,并调整其俯仰角度,通过不同的定标体对被测目标进行参照,综合处理,得到被测目标的RCS特性。测量过程中遇到的另一个问题是由于多普勒频移的存在,导致目标回波检测出来的距离发生距离偏移,如何对其修正是本文下一步研究的内容。
[1] 黄培康,殷红成,许小剑.雷达目标特性[M].北京:电子工业出版社,2005.
[2] 麻连凤,桑建华,陈颖闻,等.隐身目标RCS外场测试概述[J].测控技术,2013,32,(增刊):164-167.
[3] 陈秦,魏薇,肖冰国,等.外武器装备RCS测试外场研究现状[J].表面技术,2012,41(5):129-131.
[4] 庄钊文,袁乃昌,莫锦军,等.军用目标雷达散射截面预估与测量[M].科学出版社,2007.6.
[5] 王宇帧.复杂目标RCS计算[D].西安:西安电子科技大学,2008.
[6] 刘君,马瑶,渠立永,等.微波暗室低散射目标RCS测量方法[J].解放军理工大学学报(自然科学版),2013,14(1):19-24.
[7] 赵国群,朱峰,刘丽娜,等.基于室外场RCS精确测量分析[J].现代电子技术,2008(11):12-14.
[8] 刘良,李淑华.高低频混合方法估算角反射器阵RCS[J].现代电子技术,2014,37(15):12-14.
[9] 戴崇,徐振海,肖顺平.雷达目标动静态RCS特性差异分析[J].信号处理,2013,29(9):1256-1263.
[10]李华军.HRR外场雷达散射测量系统的设计[D].成都:电子科技大学,2013.
[11]丁世敬,黄刘宏,李跃波,等.宽带扫频RCS自动测量系统设计[J].电子测量技术,2014,37(5):61-63.
[12]薛元松,许家栋.单点频与宽带扫频测试目标RCS的比较[J].现代电子技术,2006(3):25-27.
[13]刘密歌,张麟兮,李南京.基于矢量网络分析仪的RCS测量系统及应用[J].电子测量与仪器学报,2007,21(1):82-85.

张政超(1981—),男,湖北武穴人,硕士,工程师,主要研究方向为雷达试验、雷达对抗试验的总体设计;
E-mail:15515363876@163.com
李文臣(1972—),男,河北威县人,博士,高级工程师,主要研究方向为雷达试验、雷达对抗试验的总体设计;
袁翔宇(1974—),男,甘肃平凉人,硕士,高级工程师,主要研究方向为雷达试验、雷达对抗试验的总体设计;
林 欢(1979—),男,辽宁普兰店人,学士,工程师,主要研究方向为雷达试验、雷达对抗试验的总体设计。
A Dynam ic M easurement M ethod of Taget's RCS Based on M easure System on Airship
ZHANG Zheng-chao,LIWen-chen,YUAN Xiang-yu,LIN Huan
(Luoyang Electronic Equipment Test Center of China,Luoyang 471003,China)
A measure system on airship(including vector network analysis instrument,antenna and power amplifier)is built based on describingmain thoughtof RCS'smeasurement briefly,then measuremethod and work flow are expounded in this paper.Selection of standard object,coordinate transform inmeasure course and homing by photo electricity instrument are analyzed,error analysis and data processing course are introduced.Measure system and method in this paper are applied actual target's RCSmeasurement.Application results show it can measure target's RCS in appointed frequency from different angles in height and orientation,so it can offer reference on equipment produce and test.
Measure System on airship,RCS of target,dynamic measurement
TN953
A
1673-5692(2015)05-551-06
10.3969/j.issn.1673-5692.2015.05.018
2015-04-30
2015-09-20
