双采样点角估计筛选均值法对舰船的角估计
2015-06-23邹建武祝明波李相平
邹建武,祝明波,王 炜,李相平
(1.海军航空工程学院电子信息工程系,烟台 264001;2.65040部队,沈阳 110141)
工程与应用
双采样点角估计筛选均值法对舰船的角估计
邹建武1,祝明波1,王 炜2,李相平1
(1.海军航空工程学院电子信息工程系,烟台 264001;2.65040部队,沈阳 110141)
针对利用双采样点解决单脉冲体制下两个慢起伏舰船目标的角估计算法噪声适应能力差的缺点,提出一种双采样点角估计筛选均值法。首先介绍了双采样点角估计算法对舰船方位角进行估计的基本原理;然后在此基础上利用单个舰船回波信号脉冲串得到一组估计值,通过角度有界约束和孤立点剔除法对此组估计值进行筛选,对筛选后的估计值取均值得到单个脉冲串的方位角估计值,再对多个脉冲串的方位角估计值取均值作为两目标的方位角估计值。最后通过仿真结果表明改进算法性能稳定,估计精度优于简单的双采样点算法,具有较强的噪声适应能力。
单脉冲雷达;舰船目标;角估计;筛选
0 引 言
单脉冲雷达测角技术在工程技术上比较成熟,因其对单目标的测角精度较高而在雷达目标跟踪中得到广泛应用,但当两目标或者多目标存在于单脉冲雷达同一波束和同一距离单元内时,单脉冲雷达将多目标当成单目标来进行测角跟踪,此时得到的目标方位角不是所有目标的真实方位角,而可能是其功率重心,从而造成单脉冲雷达在跟踪过程中对目标的丢失。此问题引起了国内外专家的重视与研究。
Blair[1,2]等人提出广义似然比检测法则对目标的个数进行估计,在此基础上提出了对两点源进行角度估计的矩估计法,并给出了估计的Cramer-Rao界,此方法需要提前知道两点源的信噪比,在实际条件下不容易满足。Sinha[3]针对SwerlingⅠ型和SwerlingⅢ型目标提出了目标到达角 (direction of arrival,DOA)的最大似然估计方法,但此方法无法得出显式解,只能利用数值方法求得近似解,且求得的最大似然解对初始值的选取敏感。Zhen Wang[4]对最大似然估计方法进行了改进,得到了DOA估计值的显式解。Xin Zhang[5]考虑到匹配滤波器相邻采样点上存在能量泄露的情况,提出了最大似然估计与最小描述长度(minimum description length,MDL)准则结合的方法,可对多达5个目标的参数进行估计,并将其推广到扩展目标[6]。然而,上述各种方法都是针对RCS起伏为Swerling型的目标,对于RCS起伏不满足Swerling型的目标而言,由于接收机输出信号具有复杂的概率分布,从而导致相关的检测及估计理论难于建立。
文献[7]提出了一种双采样点角估计方法,针对在两个脉冲上信号幅度恒定的目标进行分辨,理论上可以推广到非起伏目标和慢起伏目标。此方法假设相邻的两个脉冲内的两目标的幅度是恒定的,而两目标的相位服从均匀分布,利用两个相邻脉冲的和差信号来求解两目标的方位角,然而双采样点角估计方法对噪声的适应能力较差。针对此缺点,本文对算法进行改进,提出了一种双采样点角估计筛选均值法,将其应用于两个慢起伏舰船目标的角分辨,并对算法进行的计算机仿真。仿真结果表明,该方法具有较强的噪声适应能力。
1 双采样点角估计算法
在同一距离单元内,针对在方位角不可分辨的两个舰船目标,假设两个舰船目标的幅度恒定,其相位服从均匀分布。在相邻两脉冲内,分别取某一时刻,此时单脉冲雷达和差通道在相邻两脉冲的信号为

从式(1-4)可推导出

对式(5-6)变换归纳可得

对式(7)进行分解合并的
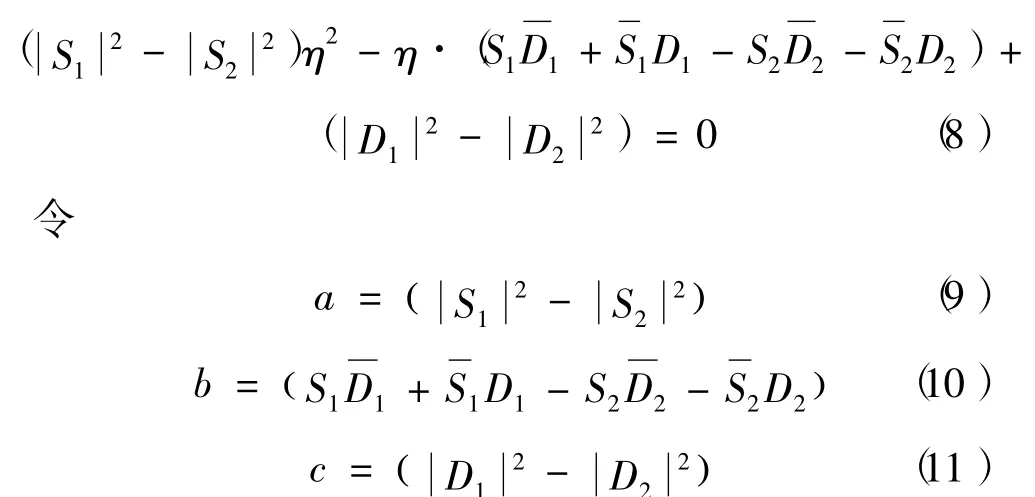
此时式(7)和式(8)可表示为

针对此一元二次方程可得解
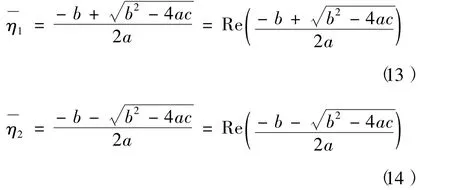
当η1<η2时,两舰船目标单脉冲比的估计值为
而两舰船目标方位角的估计值为
式中,θBW为天线方向图的3 dB波束宽度;km为单脉冲角误差斜率,通常取1≤km≤2。
2 双采样点角估计筛选均值算法
上述双采样点角估计算法在不考虑噪声的理想情况下,可准确估计出两目标的方位角,但双采样点角估计方法对噪声适应能力较差,仅在高信噪比的情况下能有效分辨出两目标;在噪声存在的情况下,本文在原算法基础上提出了一种改进角估计方法来减小噪声的不利影响,首先单脉冲雷达对舰船目标发射M个雷达信号脉冲串(脉冲个数为N),针对每个回波脉冲串,取相邻的两个脉冲利用上述双采样点角估计算法对两个舰船目标方位角进行估计,得到一组估计值,通过有界约束和孤立点剔除法[9]对此组估计值进行筛选,对筛选后的估计值取均值得到每个脉冲串的方位角估计值,再对M个脉冲串的方位角估计值取均值作为两舰船目标的方位角估计值;其算法步骤如下:



此算法中的步骤(2)利用有界约束对估计值集合进行初步筛选,步骤(4)利用孤立点剔除方法对估计值集合进行第二步筛选来减弱噪声的影响。
3 算法性能仿真
本节对上述两种算法进行仿真,着重分析改进算法的性能。
3.1 双采样点角估计算法性能仿真
两舰船目标的方位角分别为-1°和1°,舰船目标RCS服从对数正态分布,波束宽度为θBW=6°,脉冲个数N=20,km=2,在无噪声和SNR=30 dB的情况下,双采样点角估计算法分辨结果如图1所示。

图1 无噪声的仿真结果
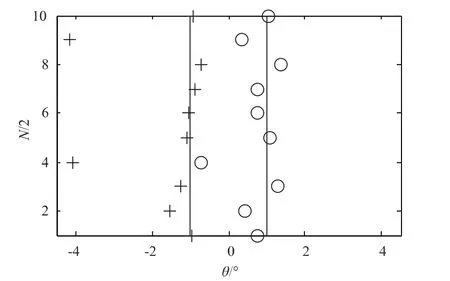
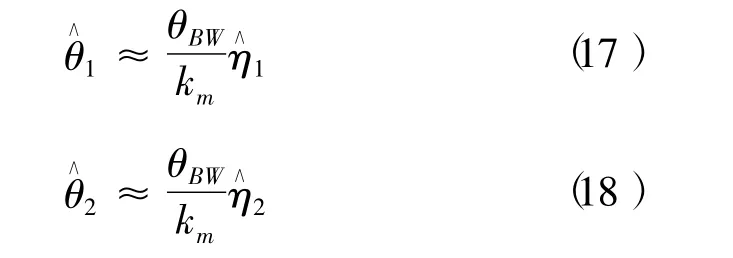
图2 SNR=30 dB的仿真结果
由图1可知,在无噪声时,双采样点角估计算法能准确分辨出两个舰船目标,在有噪声的情况下,双采样点角估计算法估计的目标方位角有误差。由图2可知即使在SNR=30 dB时,误差较大,为分析算法性能,在1 dB~30 dB,情况下,利用Monte Carlo仿真100次,得到其均方根误差如图3所示。
由图3可知,在不同信噪比的情况下,利用双采样点角估计算法对两目标进行分辨时,得到的均方根误差较大,其中,均方根误差曲线出现了数个不稳定点,其原因在于受噪声的影响,使得有时所估计的方位角远大于或远小于真实的目标方位角。

图3 均方根误差与信噪比的关系曲线
3.2 改进算法的性能仿真
两舰船目标的方位角分别为-1°和1°,舰船目标RCS服从对数正态分布,波束宽度为θBW=6°,脉冲个数N=20,雷达数据更新次数M=10,L=2km=2,在SNR=30 dB的情况下,改进算法分辨结果如图4所示。
图4 SNR=30 dB的改进算法仿真结果
由图4与图2对比可知,所提算法能估计出舰船目标的方位角,且精度更高。
为分析均方根误差与SNR的关系,SNR取1dB~30dB,其他仿真条件不变,Monte Carlo仿真100次得到的改进算法仿真结果如图5所示。
由图5可知,随着信噪比的减小,改进算法的均方根误差变大,与图3相比,消除了不稳定点,且估计精度较高,具有较强的噪声适应能力。
为分析均方根误差与舰船目标张角的关系,目标1的方位角为-θ/2,目标2的方位角为 θ/2。SNR=20 dB,其他仿真条件不变,Monte Carlo仿真100次得到的仿真结果如图6所示。
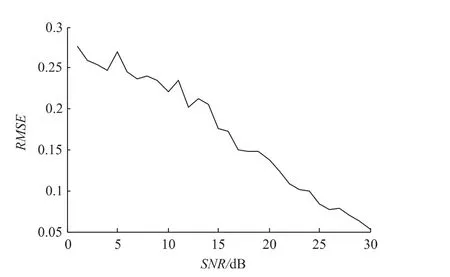
图5 均方根误差与信噪比的关系曲线
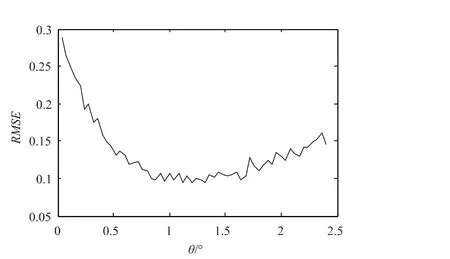
由图6可知,在算法估计角度范围内,随着两目标夹角的变小,均方根误差先变小,当两目标夹角为0.84°时,均方根误差变大。当目标夹角为0.5°时,均方根误差为0.135°,虽然误差较大,但仍然能分辨出目标。
为分析均方根误差与脉冲积累次数和雷达数据更新次数的关系,N=10,20,…,100,M=10,30,SNR=20 dB,其他仿真条件不变,Monte Carlo仿真100次得到的仿真结果如图7所示。
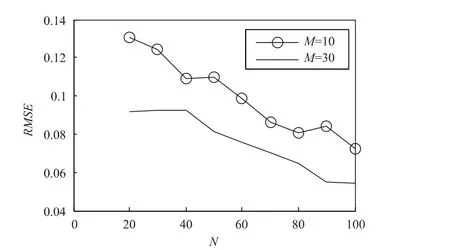
图7 均方根误差与脉冲个数、雷达数据更新次数的关系曲线
由图7可知,仿真过程中,脉冲个数和雷达数据更新次数越多时,目标方位角估计的误差越小;但从图可看出当N=10时,图上没有显示出均方根误差值,这是由N取值过小,导致经过两步筛选,把数据全部筛除的结果,因而N取值不宜过小;但是受实际情况限制,脉冲个数和雷达数据更新次数也不应取值过大。
4 结 语
本文基于双采样点角估计算法深入分析了两个慢起伏舰船目标的角分辨角问题,针对算法噪声适应能力较差的缺点,提出了一种双采样点角估计筛选均值算法。仿真结果表明,具有较高的估计精度,新算法噪声适应能力较强;目标方位角估计跟信噪比、两目标张角、脉冲个数和雷达数据更新次数有关,文中提出的新算法比先前估计算法具有更好的估计性能。此外数据剔除个数L都是凭经验获得,其取值还有待于进一步研究。
[1] BlairW D,Brandt-Pearce M.Unresolved Rayleigh detection usingmonopulsemeasurements[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(2):543-552.Asseo S J.
[2] BlairW D,Brandt-Pearce M.Monopulse DOA estimation of two unresolved Rayleigh targets[J].IEEE Transactions on Aerospace and Electronic Systems,2001,37(2):452-469.
[3] Sinha A,Kirubarajan T,Bar-Shalom Y.Maximum likelihood angle extractor for two closely spaced targets[J]. IEEE Transactions on Aerospace and Electronic Systems,2002,38(1):183-201.
[4] Wang Z.Angle estimation for two unresolved targets with monopulse radar[J].IEEE Transactions on Aerospace and Electronic Systems,2004,40(3):998-1018.
[5] Zhang X,Willett P,Bar-Shalom Y.Monopulse radar detection and localization ofmultiple unresolved targets via joint bin proeessing[J].IEEE Transactions on Signal Processing,2005,53(4):1125-1236.
[6] Zhang X,Willett P,Bar-Shalom Y.Detection and localization of multiple unresolved extended targets via monopulse radar signal processing[J].IEEE Transactions on Aerospace and Electronic Systerms.2009,45(2):455-472.
[7] Lu Zhenxing Gao Meiguo Jiang Haiqing etc Closed-form Solutions for Directions of Two Steady Targets with Two Pulses in Monopulse radar[J].2012 IEEERadar Conference 2012 5:74-78
[8] 宋广.水面舰船RCS统计模型分析[J].舰船电子对抗,2011,34(2):73-74.
[9] 简艳贾洪勇一种基于数据场的K-均值算法[J]计算机应用研究2010 27(12):4498-4501.

邹建武(1986—),男,博士研究生学历,主要研究方向为雷达目标分辨技术;
E-mail:yantailudong1986@163.com
祝明波(1970—),男,副教授,博士,主要研究方向为雷达成像技术、雷达目标分辨技术;
王 炜(1982—),男,黑龙江绥滨人,本科生,研究方向为SAR成像技术;
李相平(1963—),男,山东邹平人,教授,博导,研究方向为精确制导技术。
Angle Estimation for Ship Targets w ith M ean A lgorithm of Selected Two Sam p le Points Angle Estimation
ZOU Jian-wu1,ZHU Ming-bo1,WANGWei2,LIXiang-ping1
(1.Department Electronic and Information Engineering NAAU Yantai Shandong 264001,China;2.The 65040thUnit of PLA,Shenyang Liaoning 110141 China)
A mean algorithm of selected two sample points angle estimation was proposed for the poor noise adaptability of the two sample points angle estimation algorithm with monopulse radar.First,the principle of the two sample points angle estimation to ship targetwas introduced,on thatbasis,single ship echo pulse trainswas used to get a group of angle estimates,this group of angle estimateswas selected by the angle bounded constraints and outliers culling method,and a angle estimate for single signal pulse train was gotten after themean of the selection of angle estimates group.The angle estimates of the two targets were gotten by themean of estimated angles ofmultiple signal pulse trains.At last,simulation results show that the proposed algorithm has stable performance,and has better estimation performance than the two sample points angle estimation algorithm and good noise adaptability.
monopulse radar;ship targets;angle estimation;selection
TN959
A
1673-5692(2015)05-518-05
10.3969/j.issn.1673-5692.2015.05.012
2015-06-01
2015-09-15
国家自然科学基金(61471379)
