无人驾驶汽车视觉导航中车道线检测的研究*
2015-06-23韩广飞李晓明
韩广飞,李晓明,武 潇
(太原理工大学电气与动力工程学院,太原 030024)
无人驾驶汽车视觉导航中车道线检测的研究*
韩广飞,李晓明,武 潇
(太原理工大学电气与动力工程学院,太原 030024)
为了提高无人驾驶汽车视觉导航系统中车道线检测的准确性和实时性,在对车道线检测技术进行深入研究的基础上,提出一种能快速准确检测出车道线的新算法。首先采用分块思想将RGB图像中与道路无关的区域去除,以缩短数据处理时间。然后对余下的RGB图像进行灰度化处理,接着用中值滤波法消除随机噪声,再用最大类间方差法(Otsu法)初步得到二值图像。最后对二值图像利用数学形态学进一步边缘细化,使位于车道线上的每个像素行只有一个像素特征点,再采用Hough变换检测出车道线。Matlab仿真结果表明,此算法能够快速准确地检测出车道线,较传统检测算法具有更强准确性和实时性。
无人驾驶,阈值分割,边缘检测,数学形态学,Hough变换
0 引言
车道线检测[1-2]是实现无人驾驶汽车视觉导航技术的关键,为了提高车道线检测的实时性和准确性,学者们提出多种算法,但采用简单的车道线检测算法,容易增大误识别的可能性;而采用抗干扰能力很强的复杂算法,其实时性又很差。如何在无人车视觉导航中快速、准确地检测出车道线已成为热点研究课题。其中Hough变换算法[3]是目前车道线检测的重要方法,它具有良好的抗噪性能及对图像中目标部分被遮挡和覆盖现象不敏感等特性,但计算速度很慢,且误检率较大,不能满足对实时性和准确性要求很高的无人车检测系统。对此,又有学者们提出多种改进算法,文献[4]通过扩展Hough变换空间来检测线段的实长,文献[5]对车道线的初始定位用极角约束Hough变换来实现,文献[6]应用Hough空间峰值点逆变换提取线段特征,文献[4-6]考虑的都是在Hough变换过程中如何进行改进,并没有考虑在进行Hough变换之前,对所变换的目标作恰当处理,缩短数据运算时长,提高直线检测精准度。
本文依据该思路,首先对采集到的RGB道路图像分块以极大地减少待处理的数据量,其次对图像进行灰度化,再用中值滤波除噪,接着利用Otsu法进行二值化处理,最后利用形态学对二值化图像进行细化处理使数据量明显降低,再结合Hough变换快速准确检测车道线。
1 车道线检测算法
1.1 道路图像采集及预处理
文中所用的RGB彩色道路图像是由CCD摄像机对实际直线型道路进行采集的,在图像中每一个像素点都是由R(红)、G(绿)、B(蓝)3种颜色分量混合构成,而这3种颜色各有256个级别的分量,那么图像中每个像素点的变化范围就高达1 600多万(256×256×256)。由此可看出彩色数字图像有非常大的信息量,对其处理需要花费大量的时间,所以在实时性要求很高的自动行车环境下并不适用。
为了获取道路的有用信息并提高运算速率,需要预处理含有丰富信息的RGB图像。通过对摄像机采集的多帧图像统计并分析发现,图像上方的1/3区域为天空和背景区域,称为无效区域,剩余2/3区域为有效区域。去除无效区域可将图像中数据量减少,进而缩短数据处理时间。本文对摄像机采集图像中的一帧进行试验,如图1(a)所示。采用分块思想后得到的分块图像如图1(b)所示。
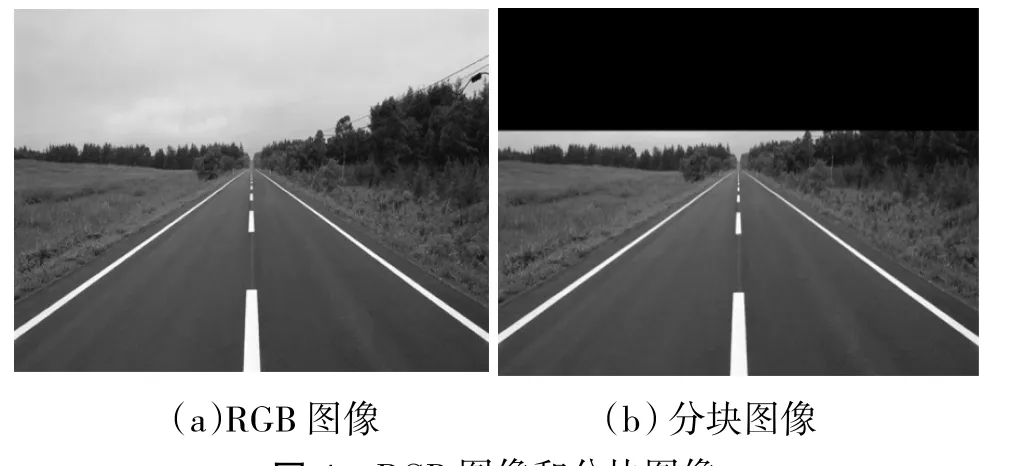
图1 RGB图像和分块图像
对图1(b)中的彩色有效区域转换为灰度图像,即灰度变换,得到图2(a)。利用边缘检测对图2(a)处理后得到图2(b)。
图2(a)中图像灰度集中位于一狭小区间,导致图像细节模糊不清,间接增加了检测的误差。通过调整图像对比度的比例关系,使图像灰度效果得到增强,能清晰显示图像细节,减少检测误差。灰度效果增强图像如图3(a)所示,增强后的图像边缘检测图如图3(b)所示。对比图2和图3可知道路灰度图像增强后图像细节清晰且突出,边缘效果更加明显,噪声点更少。
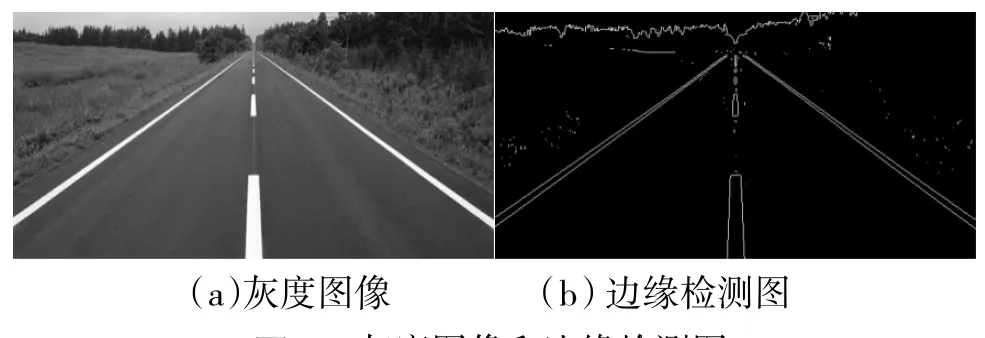
图2 灰度图像和边缘检测图
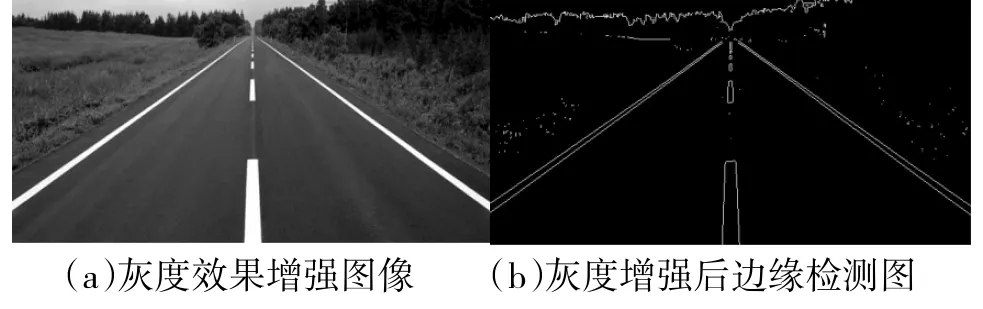
图3 灰度效果增强图像和边缘检测图
对于任何一幅图像,几乎都存在不同程度的噪声,噪声降低了图像质量,不利于对图像中有用信息的提取,所以必须对噪声进行滤除。中值滤波法[7]是一种非线性的平滑技术,其主要优点是将随机噪声抑制的同时,还能对图像中目标边缘信息的模糊进行有效保护,而目标边缘信息的准确提取对于后续处理是非常关键的一个环节。
正确地选择窗口尺寸大小可以提高执行效率,最大限度地抑制随机噪声,极好地保护目标边缘。本文通过选择不同尺寸大小的窗口进行中值滤波实验,将得到的实验结果进行对比,最终确定3×3尺寸为最优窗口尺寸。图4(a)和图4(b)分别是对图像有效区域添加随机噪声以及用最优窗口尺寸中值滤波后的图像。
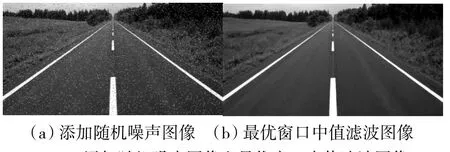
图4 添加随机噪声图像和最优窗口中值滤波图像
1.2 道路图像分割
图像经过预处理后,仍是数据量很大的256级灰度图,在实时监测中,对车道线识别的速度还是较慢。为了进一步提高识别速度,对图像进行二值化的处理使图像数据量进一步减少是非常有必要的。采用二值化可以在去除图像大部分与道路无关背景的同时,保留亮度较高车道线区域,为后续的车道线检测奠基础。合适的阈值选取是二值化的核心步骤,经过图像分割算法对比试验,选择最适用于道路分割的算法。本文采用Otsu法,即最大类间方差法[8]。算法如下:
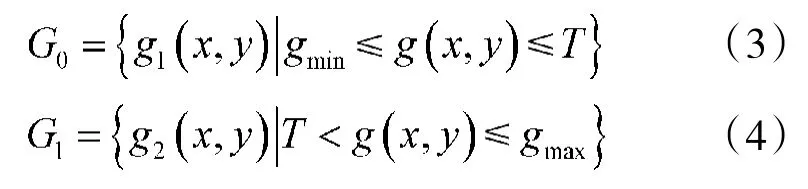
设一幅数字图像g(x,y)中的灰度分布为gmin到gmax,(x,y)为像素点的位置,Mi是灰度值为i的像素数,则图像总的像素M为:

各像素值概率P(i)为:

取阈值T把像素按灰度级分成两类,即:
则G0产生的总概率P0为:

对应的均值μ0为:

G1产生的总概率P1为:

对应的均值μ1为:

图像g(x,y)的均值为:

两类间方差为:

在gmin到gmax中求使得方差为最大值时的T*,即max σ2(T)时的T值为最优阈值。
利用上述取得的最优阈值T*道路图像进行二值化处理,计算公式为:

图像二值化实验结果如图5所示。

图5 二值化图像
从图5中可以看出,只有车道线和部分天空背景等区域的灰度值为255,其他区域灰度值为0。经此方法处理后,图像数据量极大减少,车道线识别速度明显提高。
1.3 车道线检测
Hough变换算法进行车道线检测是目前所有检测法中应用最广泛的,但Hough变换对图像中所有像素点的处理都需要经过三次映射,这样算法的速度将会很慢,不能满足实时性要求很高的行车系统。因此,本文提出利用形态学对二值化的图像进行处理后,再进行Hough变换,这样既能保证准确性,又能减少计算量,也满足了系统的实时性要求。算法步骤如下:
首先,运用形态学对图5进行细化处理,只留下车道线上每个像素行的一个像素特征点,得到细化后的图像如图6(a)所示;其次,将图6(a)和一个二值化的掩膜进行点乘进一步去除非道路的背景和剩余噪声得到感兴趣区域图像,如图6(b)所示;最后,利用Hough变换对图6(b)进行道路直线检测。
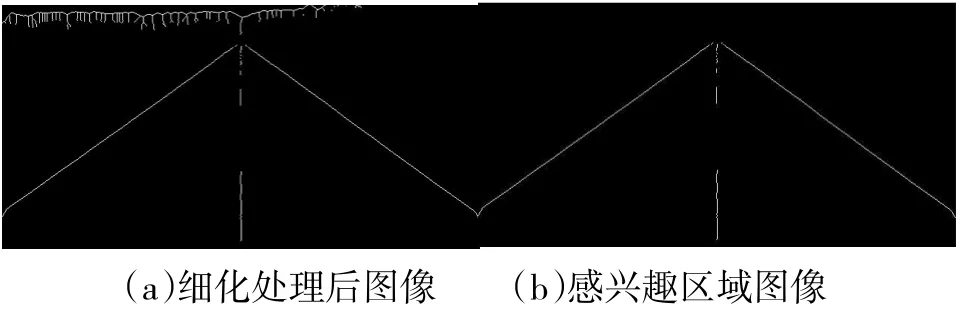
图6 细化处理后图像和感兴趣区域图像
2 仿真及结果分析
在Matlab环境下对车道线进行检测,利用传统检测算法和本文所提算法分别进行实验,得到的结果见图7所示。
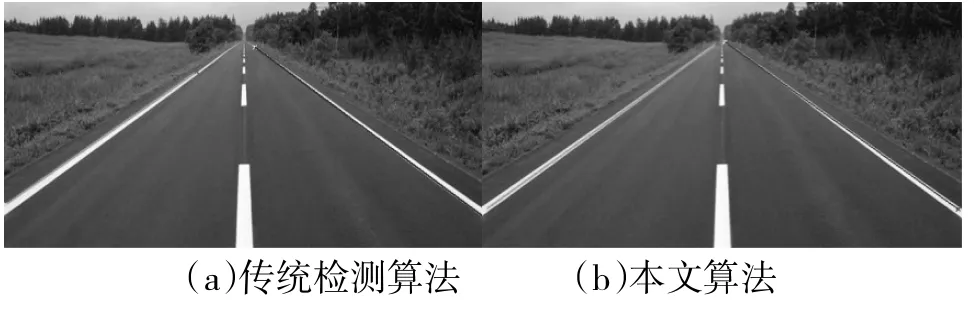
图7 两种不同算法的实验结果对比图
用以上两种不同算法进行了100组实验,求取仿真时间,对得到的数据取平均值,对比结果如表1所示。
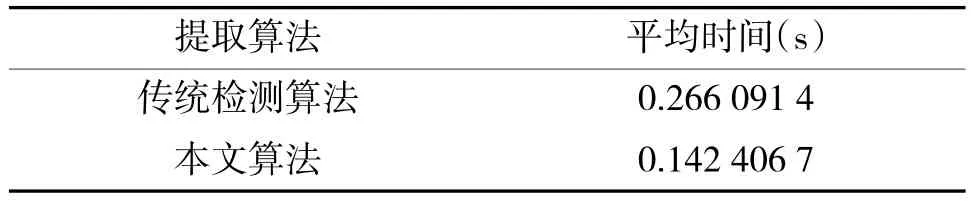
表1 两种不同算法提取车道线平均时间对比
由图7和表1可知,本文算法不但可以精确地检测出车道线的位置,而且由于车道线经过了细化处理,数据量很小,使得Hough变换检测车道线耗时很短。通过对比两种不同算法可知,本文算法较传统检测算法,将提取车道线的平均时间提高了46.5%。因此,对于直线型车道线检测,本文算法具有更强准确性和实时性。
3 结束语
本文提出了一种基于道路边缘特征,对结构化直道进行车道线检测的新算法。该算法在Hough变换进行之前,对所变换的目标作了适当处理,以弥补Hough变换实时性不高、误检率较大的缺陷。仿真结果表明,本文所提算法提取车道线时间短、准确性稳定,能够满足无人驾驶汽车视觉导航中快速准确检测车道线的要求,同时也为后续检测无人车前方是否存有障碍物奠定了坚实的基础。
[1]王强.智能车辆视觉辅助导航中的道路检测技术研究[D].南京:南京航空航天大学,2005.
[2]Ran B,Liu H.Development of A Vision-based Vehicle Detection and Recognition System for Intelligent Vehicle[C]//TransportationResearchRecord79thAnnualMeeting,2000.
[3]陈震,高满屯,杨声云.基于Hough变换的直线跟踪方法[J].计算机应用,2003,23(10):30-32.
[4]Cha J,Cofer R H,Kozaitis S P.Extended Hough Transform for Linear Feature Detection[J].Pattern Recognition,2006,39(6):1034-1043.
[5]杨喜宁,段建民,高德芝,等.基于改进Hough变换的车道线检测技术[J].计算机测量与控制,2010,18(2):292-294.
[6]林玉池,谢妤婵,刘启海.基于Hough变换的线段提取新方法[J].纳米技术与精密工程,2009,7(5):433-438.
[7]Dagan E,Mano O,Stein P,et al.Forward Collision Warning with a Single Camera[C]//Proe of IEEE Intelligent Vehicles Symposium,2004.
[8]吴一全,潘喆.2维最大类间平均离差阈值选取快速递推算法[J].中国图象图形学报,2009,14(3):471-476.
Research of Lane Line Detection in the Vision Navigation of Unmanned Vehicle
HAN Guang-fei,LI Xiao-ming,WU Xiao
(School of Electrical and Power Engineering,Taiyuan University of Technology,Taiyuan 030024,China)
In order to improve accuracy and real-time of lane line detection in vision navigation system of unmanned vehicle,based on an in-depth study of the lane line detection technique,a new algorithm for fast and accurate detection of lane is introduced.Firsly,through the use of block theory,the road independent region of RGB image is removed,to shorten the data processing time.And then after the graying of the rest of RGB image,the median filtering method is used to eliminate the random noise,the Method of Maximum Classes Square Error(Method of Otsu)is introduced to obtain the binary image.Finally,edge thinning based on mathematical morphology is proposed to make each pixel row of each lane only left one characteristic pixel.And the lane line detection based on Hough transformation is carried out.The Matlab simulation results show that the proposed algorithm can detect lane line quickly and accurately,compared with the traditional method has better accuracy and real-time.
unmanned vehicle,threshold segmentation,edge detection,mathematical morphology,hough transformation
U46
A
1002-0640(2015)06-0152-03
2014-04-18
2014-05-29
山西省安监局基金资助项目
韩广飞(1988- ),男,河北邢台人,硕士研究生。研究方向:电工理论与新技术。
李晓明(1955- ),男,教授。
