基于扩张状态观测器的稳定控制算法
2015-06-23师永平朱元武武云鹏王玉华王永宏
师永平,朱元武,武云鹏,王玉华,王永宏
(北方自动控制技术研究所,太原 030006)
基于扩张状态观测器的稳定控制算法
师永平,朱元武,武云鹏,王玉华,王永宏
(北方自动控制技术研究所,太原 030006)
在稳定控制系统中,以PID控制算法为典型代表的传统负反馈设计,依靠系统在低频段的增益来实现对载体扰动作用的抑制,具有一定的局限性。以某陀螺稳定平台为研究对象,在PID负反馈稳定控制系统的基础上,通过加入扩张状态观测器对扰动进行了观测及补偿。仿真比较了加入扩张状态观测器前后的算法控制效果,结果表明扩张状态观测器是提高控制系统稳定精度的一种有效方法。
扩张状态观测器,稳定精度,扰动补偿,PID
0 引言
稳定平台由于能隔离载体扰动,不断测量平台姿态和位置的变化,精确保持动态姿态基准,从而使安装在平台上的光电等设备能够在惯性空间内保持稳定,因此,被广泛应用于机载、舰载、车载武器等军事领域以及空间遥感探测、公安消防、环境监测等民用领域[1-3]。在现阶段,大部分的稳定控制系统采用传统PID算法或其他经典控制算法,依靠系统在低频段的增益来实现对载体扰动的抑制[4]。
随着科学技术的发展,对稳定平台的稳定精度要求越来越高。在采用以PID控制算法为典型代表的传统控制方法时,系统受到传动链刚性的影响,其带宽受到限制,系统的低频段增益难以做到更高,因此,需要采取改进措施来提高系统的稳定精度。
从完成控制的目的来看,如果某一种扰动作用不影响系统的被控输出(即这种扰动从被控输出不能观测,或这种扰动不能控制被控输出),那么在控制被控输出的过程中是不用考虑消除这种扰动的影响[5-6]。
借用状态观测器的思想[7](即根据量测到的系统输入和输出来确定系统的所有内部状态信息),把能够影响被控输出的扰动作用扩张成新的状态变量,用特殊的反馈机制建立能够观测被扩张的状态——扰动作用的扩张状态观测器[5-6],通过扩张状态观测器估计出系统的各个状态变量及系统的扰动并给予相应补偿,从而提高系统的稳定精度。本文在PID负反馈稳定控制系统的基础上,利用扩张状态观测器对扰动进行了观测及补偿,实现了系统的高精度稳定。
1 扩张状态观测器简介
扩张状态观测器[8-10]是利用系统的输入输出,估计受未知扰动作用的不确定对象的扩张状态,以实现系统对扰动的补偿作用。
设有如下的n阶被控对象:

系统(1)的n个状态变量为{x(t),x˙(t),…,x(n-1)(t)},再加入一个变量xn(t):即令xn+1(t)=xn(t)=f(x1(t),x2(t),…,xn(t),w(t)),就得到扩张的n+1个状态变量{x(t),x˙(t),…,x(n-1)(t),x(n)(t)}。
构造非线性系统:

使得以y(t)为输入的系统(2)的各状态分别跟踪扩张后的状态变量,即:

被扩张系统的状态观测器(2)称为系统(1)的扩张状态观测器(ESO),而变量xn(t)称作被扩张的状态。扩张状态观测器的最后一个状态xn+1(t)恰好可动态估计f(x1(t),x2(t),…,xn(t),w(t))的值。
在式(2)中,可以选择以下的非线性函数gi,i=1,…,n+1:

其中:
扩张状态观测器将来自系统内部或外部的各种因素都归结为对系统的扰动。对于线性控制系统,将这种扰动看作作用于积分器串联型系统的扰动作用,扩张状态观测器估计的就是这个扰动作用。对于非线性控制系统,利用扩张状态观测器估计的结果将控制量取成如下的形式,可以使原非线性控制系统补偿成线性控制系统。

2 基于扩张状态观测器的控制器设计
本文以某陀螺稳定平台为研究对象,在PID负反馈稳定控制系统的基础上,通过加入扩张状态观测器对扰动进行了观测及补偿。该陀螺稳定平台集可见光探测器、长波红外热像仪等多频谱探测器于一体,是一套工作在高扰动、大惯量条件下的高精度、高转速伺服系统,其控制系统主要由电流环、速率环和扩张状态观测器3部分组成。
2.1 电流环设计
电流环可以对复杂的电机模型进行处理,降低了电机反电动势对系统的影响,加快了电流跟随作用。
系统采用PI型的调节器将电流环校正成典型I型系统,既满足电流环超调量要小、以跟随性能为主的要求,又降低了系统阶次,可以设计相应的低阶扩张状态观测器对系统扰动进行观测及补偿。
2.2 速率环设计
速率环由速率环调节器、电流等效环节、转台负载、速率反馈环节等组成。根据系统在稳态时无静差和在动态时有较好的抗扰动性能的要求,将速率环按典型II型系统校正。由于速率环的被控对象由一个积分环节和一个小惯性环节(电流等效环节)组成,系统采用PI调节器对系统进行校正。按最小谐振峰值准则选择参数[11],其中,系统的中频段宽度h0=9,此时系统的超调量等性能指标能够满足系统要求。
2.3 扩张状态观测器设计
由于电流环的时间常数非常小,这里将电流环近似等效为比例环节,则原系统等效为一阶系统,因此,这里用一阶系统扩张状态观测器对系统扰动进行观测。
对于一阶系统x˙=f(x(t),w(t))+bu,当以x(t)为输出量进行测量时,用于观测它的一阶系统扩张状态观测器为:

用前向差分法解微分方程组,得到离散扩张状态观测器的实现方程:

其中,扩张状态观测器的状态变量z1能很好地跟踪对象输出x,且使z2估计出对象扰动的总和作用量f(x(t),w(t))。
在式(8)中,可按如下原则选取参数[12]:
(1)0<α2<α1,一般可选α1=1、α2=0.5;
(2)b0为b的估计值,是唯一与被控对象有关的参数;
(3)δ为非线性函数fal(e,α,δ)的线性段区间长度,δ取得太大时,ESO可能仅工作在线性区间,δ取得太小时,ESO容易出现颤震现象;实际中,δ取值应该大于陀螺的噪声峰值[13];
(4)h为积分步长;
(5)β01、β02为适当选择的观测器系数,选择的原则是保证 ESO稳定,一般地,β01*h≈1,2*β01<β02<10*β01。
3 仿真与数据分析
根据陀螺稳定平台实际参数(电流环等效系数为2.27 A,电磁力矩系数为5.11 Nm/A,转动惯量为5.06 Kgm2,陀螺反馈系数为3.18 V/rad/s,陀螺带宽为40 Hz),利用matlab建立控制系统仿真模型,具体如图1所示。其中,虚线框内为扩张状态观测器,adrc_eso2为用matlab实现的一阶系统扩张状态观测器模块。当开关断开时,为不加扩张状态观测器的负反馈稳定系统;当开关闭合时,为加入扩张状态观测器的负反馈稳定系统。
经过大量仿真调试,一阶系统扩张状态观测器的参数设定为 b0=0.4,h=0.001,δ=0.5,β01=1 000,β02=3 000。其中,稳定平台所用陀螺噪声峰值为0.04 °/s。

图1 陀螺稳定平台控制系统仿真模型
控制系统单位阶跃响应和开环幅频特性如图2和图3所示。具体性能指标如表1所示。由表1可以看出,加入ESO前后的控制系统性能指标基本相同。
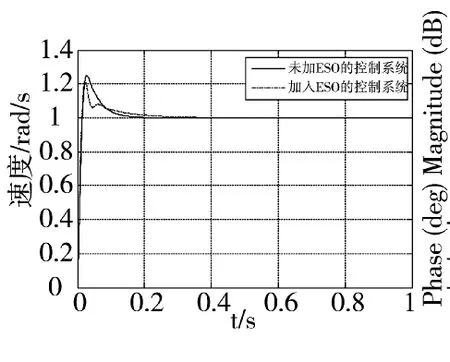
图2 控制系统单位阶跃响应曲线图

图3 控制系统开环幅频特性图

表1 陀螺稳定平台速率环主要性能指标
仿真模拟的车载扰动为幅值2°、周期2 s的正弦扰动,通过求导运算后即反应了速度的变化率。控制系统对扰动的观测如图4所示,在此扰动下的稳定精度如图5所示。
由图4可以看出,扩张状态观测器能够较好地观测系统扰动。
由图5可以看出,未加扩张状态观测器的控制系统稳定精度为2.3×10-4rad,加入扩张状态观测器的控制系统稳定精度为8×10-5rad,加入扩张状态观测器的控制系统的稳定精度比原控制系统提高了约3倍。

图4 控制系统扰动观测曲线图

图5 控制系统稳定精度曲线图
增大状态观测器系数β02和减小系数δ均可以进一步提高稳定精度,但系统的动态性能将变差,甚至会导致系统不稳定。由图6和图7可以看出,增大β02和减小δ均会使系统振荡加剧。

图7 改变δ控制系统曲线图
4 结束语
扩张状态观测器并不依赖于生成扰动的具体数学模型,也不需要直接去测量扰动的作用。本文在传统PID负反馈稳定控制的基础上加入扩张状态观测器进行扰动观测及补偿,在保持系统原有性能指标基本不变的情况下,提高了系统的稳定精度。仿真结果表明,利用扩张状态观测器对扰动进行观测及补偿是提高系统稳定精度的一种有效方法。
[1]秦继荣,武利强.车载稳瞄系统的自抗扰控制器设计[J].系统仿真学报,2008,20(7):1791-1794.
[2]黄猛,张葆,丁亚林.国外机载光电平台的发展[J].航空制造技术,2008(9):70-71.
[3]杨景照.观瞄仪稳定平台控制系统研究[D].长沙:国防科学技术大学,2009.
[4]杨丹迪,王晓玢,胡发兴,等.光电稳定平台的抗扰问题研究[C]//Proceedings of the 30th Chinese Control Conference,2011.
[5]韩京清.自抗扰控制技术[M].北京:国防工业出版社,2008.
[6]韩京清.自抗扰控制技术[J].前沿科学,2007(1):24-31.
[7]范辉,王永宏.基于Luenberger观测器的稳瞄系统应用研究[J].系统仿真学报,2011,23(9):23-26.
[8]李红光,韩伟,宋亚民.车载光电稳定跟踪平台自抗扰伺服系统设计[J].应用光学,2012,33(6):1024-1029.
[9]马幼捷,刘增高,周雪松.自抗扰控制器的原理解析[J].天津理工大学学报,2008,24(4):27-30.
[10]任海鹏,张继祖,李琦.基于自抗扰控制器的无刷直流电动机速度控制[J].电气传动,2008,38(4):46-50.
[11]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2000.
[12]张伟.车长周视镜的自抗扰控制技术[D].长沙:国防科技大学,2006.
[13]李贤涛,张葆,沈宏海.基于自抗扰控制技术提高航空光电稳定平台的扰动隔离度[J].光学精密工程,2014,22(8):2223-2231.
Research on Stability Control Algorithm Based on ESO Filter
SHI Yong-ping,ZHU Yuan-wu,WU Yun-peng,WANG Yu-hua,WANG Yong-hong
(North Automatic Control Technology Institute,Taiyuan 030006,China)
In the stability control system,the traditional negative feedback design,PID control algorithm is the typical representative,relying on the system in the low frequency gain to suppress disturbance effect on the carrier,has the certain limitation.This paper takes the gyro stabilized platform as the research object,on the basis of PID feedback stable control system,the disturbance is observed and compensated through adding the extended state observer.Before and after algorithm control effect added the extended state observer is compared simulatively,the results show that the extended state observer is an effective method for increasing stabilization accuracy of control system.
Extended State Observer(ESO),stabilization accuracy,disturbance compensation,PID
TJ02
A
1002-0640(2015)06-0125-04
2014-04-19
2014-05-11
师永平(1985- ),男,山西朔州人,硕士研究生。研究方向:系统工程。
