基于ICDKF的锂电池SOC在线估计
2015-06-19程泽张秋艳刘继光
程泽,张秋艳,刘继光
(天津大学,天津300072)
基于ICDKF的锂电池SOC在线估计
程泽,张秋艳,刘继光
(天津大学,天津300072)
动态的实时估计锂离子电池荷电状态(state of charge,SOC)是锂离子电池管理系统研究的关键技术。针对扩展卡尔曼滤波(EKF)估计SOC误差大的不足,基于二阶RC等效电路模型,提出了一种基于迭代中心差分卡尔曼滤波(ICDKF)算法的磷酸铁锂电池SOC估计方法。利用Matlab进行了仿真,并与扩展卡尔曼滤波和中心差分卡尔曼滤波(CDKF)算法进行了效果对比,从仿真结果可以看出,该SOC算法有效地降低了估计误差,与EKF相比,具有更好的滤波估计精度。
锂电池;荷电状态;迭代;中心差分卡尔曼滤波
目前,电池荷电状态(SOC)的估计算法主要有安时法、开路电压法、负载电压法、卡尔曼滤波法及扩展卡尔曼滤波算法等,各种方法均有优缺点和使用范围。安时积分法由于其荷电状态是电池电流的积分,故存在累计误差;开路电压法只能离线估计电池SOC;卡尔曼滤波要求其模型是线性模型,且当模型参数不确定时,SOC估计精度不高。由卡尔曼滤波延伸出的扩展卡尔曼滤波虽然能够解决非线性系统问题,但它是将非线性函数在滤波值附近进行泰勒级数展开并忽略二阶以上项进行的线性化,对传播后随机量的均值和方差只精确到一阶,对于强非线性系统,其滤波难以取得较高的精度;此外,对系统方程线性化时没有考虑系统状态和噪声变量的“概率传播”问题。然而Sigma点卡尔曼滤波器具有如下特点:(1)由于对非线性函数的近似不是采用泰勒级数展开的方法,因此避免了对非线性函数进行解析求导;(2)由于考虑了概率传播问题,所以对均值和方差的逼近精确度提高到至少二阶。
根据Sigma点选取的不同,其主要分为无迹卡尔曼滤波(UKF)和中心差分卡尔曼滤波[1-2](CDKF),CDKF具有比UKF稍高的理论精度,而且更加易于实现。
基于以上分析,为了提高对非线性系统线性化的精度,本文在CDKF的基础上,将迭代滤波理论引入到CDKF算法中。由于在选取Sigma点时,需要保证协方差矩阵是正则化的,故用Levenberg-Marquarat算法[3]进行优化协方差矩阵。迭代CDKF算法可以重复利用观测信息,得到更高的SOC估计精度。仿真结果验证了所提方法的有效性。
1 迭代CDKF算法
1.1 CDKF算法
CDKF算法[4]假定系统的状态变量服从高斯分布,对已知均值与协方差的随机高斯变量,利用CDKF方法可以估计任意非线性变换后的均值与协方差。常用的扩展卡尔曼滤波算法是通过将非线性函数在滤波值附近进行泰勒级数展开并忽略二阶以上项进行线性化的,对传播后随机量的均值和方差只精确到一阶。而本文提出的中心卡尔曼滤波是借助Sterling差值公式(1),用多项式逼近非线性函数的导数,它采用中心差分代替Taylor展开中的一阶和二阶导数,从而避免复杂的求导运算。它隐含地应用了基于线性化加权的统计回归方法。
分别称为一阶中心差分和二阶中心差分,式中:为中心差分半步长,决定Sigma点围绕均值的分布。
公式(1)实际上就是泰勒展开中以中心差分替代其中的导数。由于中心差分计算只依赖非线性函数在具体位置上的值,因此便于计算。
1.2 迭代CDKF方法
应用迭代中心差分卡尔曼滤波算法,则将中心差分卡尔曼滤波算法中的量测更新修改如下:
End
其中:

式中:P(k)为量测噪声协方差。
2 基于迭代CDKF算法的锂电池SOC估计
2.1 二阶RC等效电路模型
本文考虑到模型的准确性和计算复杂度,选择二阶RC模型作为锂电池的参考模型,如图1所示。当电池外部电流为零时,电池的净反应速率不会立刻为零,此时电池电压表现出回弹特性,因此等效阻抗模型用两个RC并联结构模拟电池的回弹特性和极化效应,其中、为电化学极化内阻与电容,构成一个RC并联环节;、为浓差极化内阻与电容,构成另一个RC并列环节;代表电池的欧姆内阻,oc代表电池的开路电压,为端电压为端电流。

图1 二阶RC等效电路模型

图2 放电静置实验平台
为了获得磷酸铁锂电池的开路电压与荷电状态的函数关系,本文应用DSS1K8E智能放电容量检测仪、USB数据采集卡以及恒流电源等设备进行电池的放电及静置实验,搭建实验平台如图2所示。实验用锂电池的规格为:型号LP2770102AC,标称容量12.5 Ah。以8 A恒流放电5 min,静置10 min,进行脉冲式放电,其激励电流波形如图3所示。由数据采集卡进行电压信号的采集,通过Matlab分析得到对应的端电压波形如图4。锂电池静置10 min后的电压可以看作是电池的开路电压。通过Matlab得出开路电压与荷电状态之间的关系如表1所示,利用Matlab工具箱进行多项式拟合,得拟合式(15),拟合曲线如图5所示,其均方根估计误差为0.002 626,满足估计误差。


图3 脉冲电流图
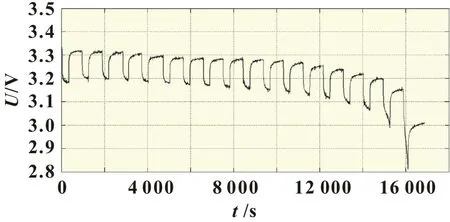
图4 端电压波形图
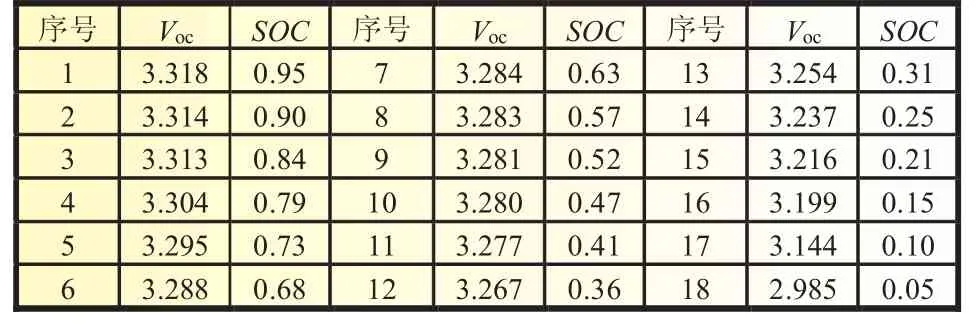
表1 Voc与SOC的关系

图5 Voc-SOC多项式拟合图
2.2 SOC估计结果
基于图2所示的实验平台,将安时积分法估计的SOC作为真值,分别应用EKF、CDKF和ICDKF滤波算法,通过Matlab/Simulink进行仿真比较,得到SOC对比图(图6),放大细节图如图7所示。
针对ICDKF算法、CDKF算法和EKF算法分别以安时积分法为基准,进行误差分析,通过Matlab/Simulink仿真验证,得出各个算法估计SOC的误差对比图,如图8所示。可以看出,迭代CDKF算法得到的SOC估算值与真实值的误差在1.13%的范围内,而CDKF算法得到的SOC估计误差范围为1.44%,EKF算法得到的SOC估计误差范围为2%,通过对比发现,迭代CDKF算法对SOC的估计精度更高。
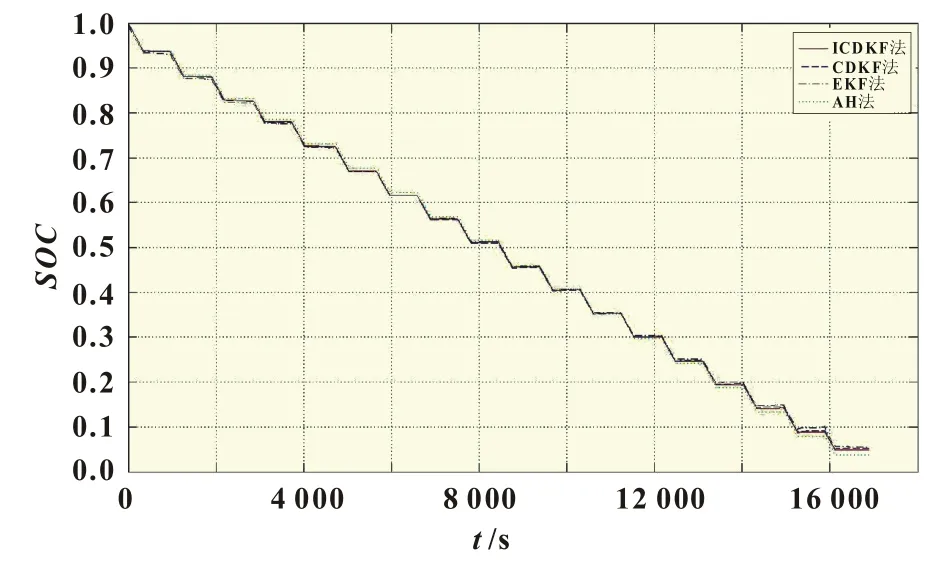
图6 SOC对比图
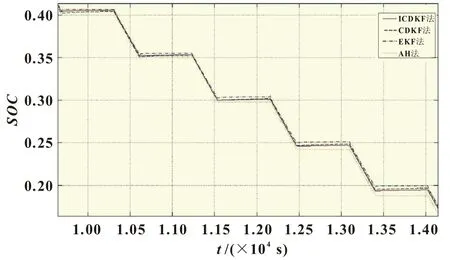
图7 SOC估计放大图
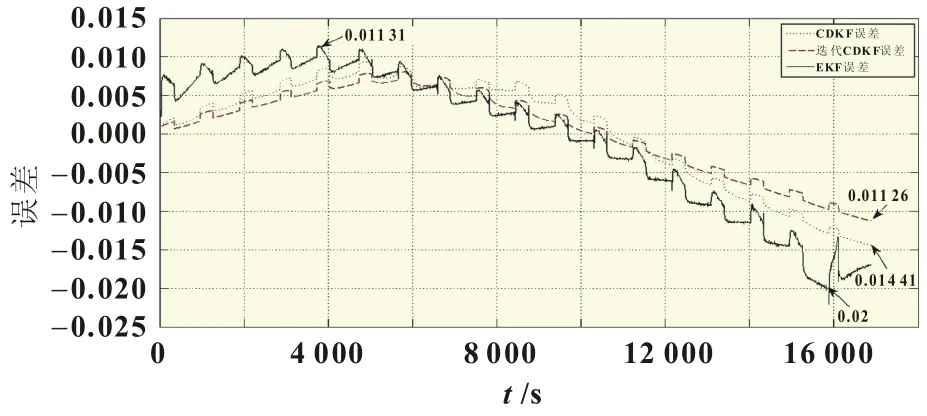
图8 误差对比图
3 结论
本文将ICDKF滤波应用在磷酸铁锂的SOC估计上,基于二阶RC等效电路模型,分别对ICDKF滤波算法、CDKF算法和EKF算法进行Matlab仿真,并与真实值进行对比分析。结果表明,与EKF算法比较,迭代CDKF算法能使锂电池SOC估计具有更好的精度。
[1]KAZUFUMI I,XIONG K Q.Gaussian filters for nonlinear filtering problems[J].IEEE Transactions on Automatic Control,2000,45(5): 910-927.
[2]刘国海,赵倩.CDKF滤波算法在GPS组合导航系统中的应用研究[J].仪器仪表学报,2008,29(8):537-540.
[3]赵志宇,罗隆福,许加柱,等.基于Levenberg-Marquadt的非线性最小二乘新型换流变压器漏感矩阵识别法[J].电工技术学报,2013(4):212-220.
[4]孟琳,王翔鹏.CDKF算法及其在自主天文导航系统中的应用[J].科技视界,2013,26:64-65.
[5]杨宏,李亚安,李国辉,等.一种改进中心差分卡尔曼滤波方法[J].计算机工程与应用,2010,46(19):132-137.
Online-SOC estimation of Li-ion battery based on ICDKF
CHENG Ze,ZHANG Qiu-yan,LIU JI-guang
The real-timely estimation of the SOC(state of charge)was the key technology in Li-ion battery management system.To overcome the error of the SOC estimation of Extended Kalman filter(EKF),a new estimation method based on iterative Center Difference Kalman Filter(ICDKF)was applied to SOC estimation of Li-ion battery,based on the second-order RC equivalent circuit model.Experiments were made to compare the new filter with the EKF and Center Difference Kalman Filter(CDKF).The simulation results demonstrate that the using new filter algorithm ICDKF has higher filtering accuracy under the same conditions.
Li-ion battery;SOC;iteration;CDKF
TM 912
A
1002-087 X(2015)03-0518-03

2014-08-15
程泽(1959—),男,江苏省人,博士,主要研究方向为环保能源的故障检测及应用。