基于凸轮控制的S型无碳小车设计
2015-06-09皇大伟景新孟程琳刘志杰
皇大伟,景新,孟程琳,刘志杰
(西北农林科技大学机械与电子工程学院,陕西 杨凌 712100)
基于凸轮控制的S型无碳小车设计
皇大伟,景新,孟程琳,刘志杰
(西北农林科技大学机械与电子工程学院,陕西 杨凌 712100)
依据第四届全国大学生工程训练综合能力竞赛要求,首先通过选择合理的原动机构、传动机构、行走机构、转向机构、微调机构设计了一辆无碳小车,重点利用MATLAB与Pro/E软件对凹槽凸轮进行了具体的参数设计与三维建模;然后针对转弯状态下的小车建立了数学模型,并在MATLAB环境下实现了小车轨迹的仿真,仿真分析表明小车未出现机构空间干涉、卡死等问题。用该方案设计制作的无碳小车在竞赛中验证了设计的合理性与轨迹仿真的准确性。
凸轮控制;无碳小车;S型轨迹;仿真
全国大学生工程训练综合能力竞赛是大学生诸多赛事之一,大赛宗旨在于提高大学生的理论应用、实践动手和工程训练等能力,每2年一届,全国各重点工科及理科院校均有参加。2015年为第四届,本届设计要求是:1)设计并制造一辆以重力势能驱动的具有方向控制功能的自行小车;2)小车为三轮结构,具有转向控制机构,且该机构具有可调节功能,以适应放有不同间距障碍物的竞赛场地;3)驱动小车行走及转向的能量由给定的重力势能转换而来,不可使用其他的能量来源。赛事给定的重力势能为4J(取g=10m/s2),竞赛时统一用质量为1kg的重块铅垂下降来获得,落差400± 2mm,重块落下后,必须被小车承载并同小车一起运动,不允许从小车上掉落。
依据上述要求,无碳小车的各部分设计应始终满足以下几个要求:1)机构设计应尽可能的简单; 2)整车质量尽可能小;3)机械摩擦损耗要小;4)整车质心要尽量低;5)底板结构设计要有足够刚性[1-2]。
1 机构设计
1.1 动力转换机构设计
动力转换机构亦称原动机构。其功能有二:一是将重物的重力势能转化为主动轮的动能,从而驱动小车前进以及转向避障;二是运动形式的转化,将重物下落所做的直线运动转化为主动轴的回转运动。笔者采用的方案是利用弹性系数很小的细绳和定滑轮机构,其中细绳两端分别拴在重物上和绕在主动轴上,使重物的重力可以转换为驱动轮上的扭矩,从而带动主动轮产生动力。为了保证小车在运行过程中能够稳定匀速前进,主动轴绕线部分的直径设计尤为重要。主动轴绕线部分的直径设计应通过动力学分析进行设计,首先应对整车质量和质心位置有个预估计;其次以小车为研究对象做受力分析,求出地面对主动轮的支反力,同时查阅相关资料得到主动轮材质与木质地板的摩擦系数;最后利用驱动力矩与阻力矩相等的关系式求得绕线部分的最大直径。为了保证小车在运行过程中不会因速度过快而导致车身不稳以及发生侧滑,绕线部分直径应采用由大到小的变径设计,小车启动后可依靠车身惯性保持前进。
1.2 行走机构设计
由于小车是沿着S型轨迹曲线前进,后轮必定产生差速问题。如果采用双轮驱动,当小车在转向时便会导致车身的不稳定,甚至是侧翻,更难以保证运行轨迹的精确性。为了解决上述差速问题,笔者采用简便、能耗小的办法——单轮驱动,也就是将从动轮轴上的一个后轮作为驱动轮,其与从动轴建立必要的旋转约束,以便传递扭矩;而另一个后轮则通过轴承套在轴上,不建立与从动轴的旋转约束,在前进过程中配合主动轮的转向能够自动调速,从而保证小车前进过程中车身的稳定性,提高运行轨迹的精确性。
1.3 传动机构设计
为了力求动力传递平稳、高效,本设计选用一级直齿圆柱齿轮,传动比i=5。
1.4 转向机构设计
本小车设计的关键便是转向机构,转向机构直接决定着小车能否按照预定轨迹前行避障。转向机构应能够将主动轴的回转运动转化为摇杆的周期性摆动,带动转向轮相对车身左右转向从而实现S型轨迹。为实现上述功能,笔者采用凹槽凸轮机构,通过高副接触使从动件获得连续或不连续的任意预期往复运动,该转向机构具有结构紧凑、简单、设计方便、高精确度等优点。
1.5 微调机构设计
根据大赛要求,所设计的无碳小车应能绕过700~1 300mm不同间距障碍物前行,同时又由于零件实际制造与装配误差的存在,所以必须设计有微调机构。该设计方案中的微调机构的工作原理为:将推杆分为前、后两部分,通过调整前推杆相对后推杆的位置来改变摇杆有效长度,从而实现转弯幅度的控制。
2 凸轮轮廓曲线设计
2.1 小车轨迹设定
设定小车转向轮的运行轨迹如图1所示。根据每隔1m设置一个障碍物的预定设计要求,可得出小车转向轮运动轨迹方程:
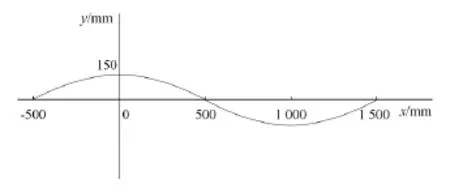
图1 小车的理想运动轨迹

式中:L为障碍物的间距,mm;A为小车中心偏离赛道的最远距离,mm。
由于前轮偏离水平位置的正切值即为运行轨迹线上每点处切线的斜率,所以

式中:α为摇杆的转角。
设导向杆的升程为h,位移为s,其中心线与转向轮支架的距离为m,如图2所示,规定α在转向杆右侧为正,左侧为负。当导向杆处于左、右极限位置时,前轮与水平位置有最大偏角,即

综合考虑后取h=6π(mm),则m=20(mm)。
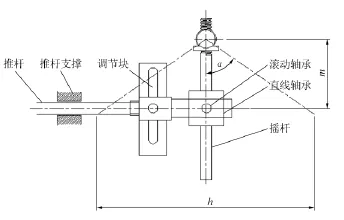
图2 推杆与摇杆关系
由几何关系可得:
由式(4)推导得推杆位移方程式:

设凸轮转过的角度为φ。因为动力的限制,后轮直径不宜过大,所以令凸轮每转1圈,从动轴转5圈。φ与x近似呈线性关系,即凸轮转360°,小车在x方向上运行2 m。

将式(6)带入式(5)可得推杆位移方程:

2.2 凸轮尺寸设计[3]
1)确定基圆半径rb。为防止凸轮在转动过程中出现卡死现象,压力角应尽量小一些。在布置推杆导路时,推杆相对凸轮的回转中心应设置一定的偏距,在此取e=4 mm。通过计算以及校验压力角后可知rb=30mm较为合适。
2)确定滚子半径rr。由公式rr=(0.1~0.5)rb得rr=3~15mm,取rr=6mm。
2.3 凸轮轮廓设计
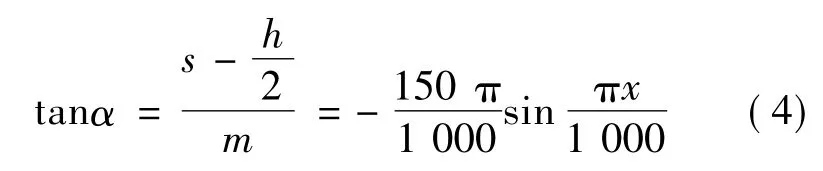
根据凸轮理论轮廓线的解析模型,在MATLAB环境下,编写符合预定设计效果的M文件,生成的凸轮基圆、理论轮廓曲线、实际轮廓曲线如图3所示。
图3 MATLAB生成的凸轮的轮廓曲线
2.4 三维建模
在虚拟环境下建立小车的三维装配模型,以此保证机构之间不发生空间位置干涉。同时建立凸轮的三维模型,并利用3D打印机完成凸轮的实物制作,降低了加工难度与成本。
将MATLAB中生成的ibl文件保存到Pro/E的工作目录下。在Pro/E菜单栏中依次点击插入→模型基准→曲线→菜单管理器→自文件→选中坐标系,然后按提示选择并打开修改好的ibl文件,获得的凹槽凸轮三维模型如图4,5所示。
图4 凸轮的轮廓曲线
3 小车轨迹曲线仿真
3.1 小车物理模型假设
为了方便应用MATLAB软件对小车轨迹建模并分析,且不会造成较大误差,对小车物理模型做4点假设:1)小车以较低的速度等速运行,忽略惯性力的作用及车身自身的角速度等;2)小车前行过程中,3个车轮在地面上的运动形式均为纯滚动;3)假设小车只做平面运动;4)忽略实际系统的制造与装配误差影响,直接以前轮在地面坐标系中的位置函数作为输入[4]。
3.2 轨迹相关参数设置
与轨迹相关的几何参数:主从动轴距L;驱动轮和转向轮的偏置距离e;后轮半径R;摇杆长度l;齿轮总传动比i;驱动轮转速ω;前轮位置函数y(x)。其中L,e,R,i,ω为小车结构参数,是定值,仅可通过调节摇杆长度l来适应不同间距的障碍物。
3.3 转弯状态运动学分析
小车的转弯状态如图6所示。
图5 凸轮槽的轮廓曲线
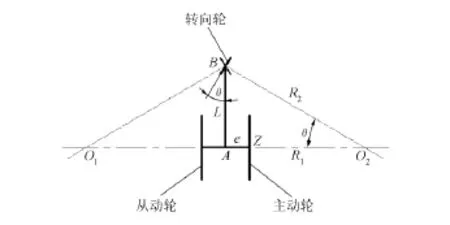
图6 小车左、右转弯状态
设小车前轮转弯半径为R2,驱动后轮(主动轮)转弯半径为R1,根据图6可得:
3.4 简化模型的轨迹方程
当A点和B点位于前轮转角为θ(t)时的速度瞬心,三轮结构小车模型可以简化为二轮车结构。设二轮小车某一时刻前轮转角为θ(t),A代表主动轮轴心,B代表转向轮轴心。在一个微小的时间段dt内,小车由AB移动到A'B',如图7所示[5]。
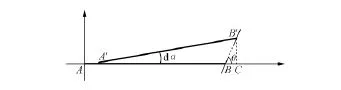
图7 简化后模型转弯状态
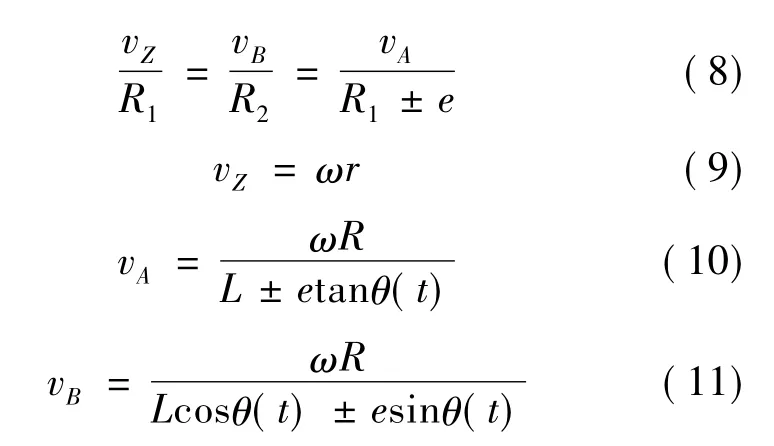
由图7可得:

基于小车车身上任意点在相同时刻的α的变化量相同,可以得到车上任意一点轨迹参数方程。如主动轮轴心点Z轨迹参数方程为:

3.5 主动轮轨迹分析
以障碍物间距为1 000mm时,主动轮的运行轨迹为例进行分析。
首先假设L=140mm,e=50mm,R= 120mm,i=5,ω=5rad/s,l=20mm。
转向轮在地面坐标系中的位置函数为

则转向轮的转角θ(t)满足以下关系:

根据上述分析,可得:
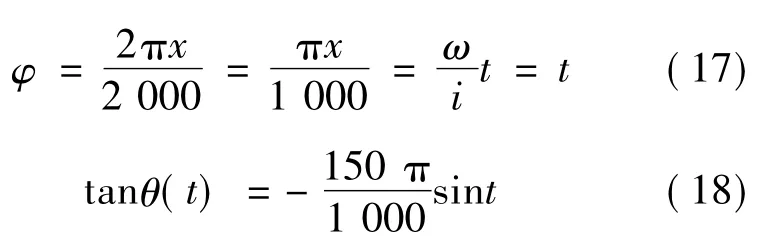
联立式(10)、(12)、(18)可得:
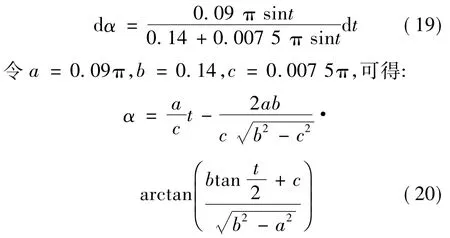
将式(20)带入式(13)、(14)中,在MATLAB软件中利用数值积分求解一系列点,连线即可得到主动轮的轨迹曲线[6]。
首先建立函数文件:
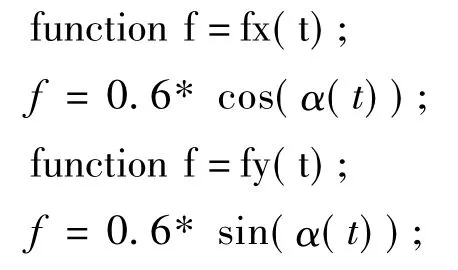
其次建立相应的M文件,在MATLAB界面中可获得如图8所示的轨迹曲线。
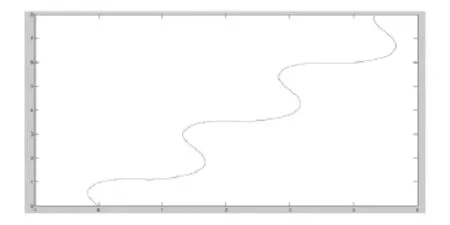
图8 主动轮仿真轨迹曲线
4 无碳小车整体示意图
图9所示为无碳小车实物照片。

图9 无碳小车实物照片
5 结束语
与一般的曲柄连杆机构相比,齿轮组、凸轮机构和摇杆机构的串联能够更好地实现小车的S型轨迹,且具有较好的新颖性、稳定性、灵活性,由该方案设计的无碳小车已在2015年第四届全国大学生综合工程能力大赛陕西赛区获得省特等奖,在实践中验证了方案设计的合理性与轨迹仿真的准确性。设计者可通过改变转向轮位置函数与摇杆长度l来适应不同间距的障碍物。设计者可在此基础上通过对具体参数的调整来优化小车的运行轨迹,以获得更为合理的试验参数。同理,该方案的设计思路同样适用于8字型轨迹。
[1]郑文纬,吴克坚.机械原理[M].北京:高等教育出版社,1997:43-45.
[2]廖汉元,孔建益.机械原理[M].北京:机械工业出版社,2007:179-187.
[3]常勇,杨富富.作平面运动滚子从动件盘形凸轮机构的第Ⅱ类机构综合问题[J].机械工程学报,2010,46(21):35-41.
[4]王斌,王衍,李润莲,等.“无碳小车”的创新性设计[J].山西大同大学学报:自然科学版,2012,28(1):59-62.
[5]方兴.智能车动力学模型参数辨识方法研究[D].上海:上海交通大学,2009.
[6]卓金武.MATLAB在数学建模中的应用[M].北京:北京航空航天大学出版社,2011:167-169.
The design of S carbon free-car based on CAM control
HUANG Dawei,JING Xin,MENG Chenglin,LIU Zhijie
(College of Mechanical and Electronic Engineering,Northwest Agriculture and Forestry University of Science and Technology,Shaanxi Yangling,712100,China)
Based on the requirement of the Forth National Undergraduate Engineering Training Integration Ability Competition,it chooses the proper engine structure,transmission mechanism,travel mechanism,steering mechanism and fine-tuning mechanism,uses the MATLAB and pro/E to design the parameters and 3D model,establishes a mathematical model of cornering car and simulates the trajectory of the car at MATLAB environment. The simulation shows that the car does not appear the problem such as space interference,jammed.The competition verifies the rationality of the design and the accuracy of trajectory.
cam control;carbon free-car;S trajectory;simulation
TH122
A
2095-509X(2015)07-0043-05
10.3969/j.issn.2095-509X.2015.07.010
2015-05-21
全国大学生工程训练综合能力竞赛资助项目
皇大伟(1994—),男,山西运城人,西北农林科技大学本科生,主要研究方向为农业机械化及其自动化。
