球棒标准器的量值溯源方法
2015-06-09刘芳芳马建敏陈庭容祝逸庆
刘芳芳 张 丰 马建敏 陈庭容 祝逸庆
(上海市计量测试技术研究院,上海 201203)
球棒标准器的量值溯源方法
刘芳芳 张 丰 马建敏 陈庭容 祝逸庆
(上海市计量测试技术研究院,上海 201203)
球棒及类球棒结构的标准器,在校准三坐标测量机类精密测量仪器以及大尺寸空间测量仪器等方面都具有很大的优势,在国际上广泛采用。而在我国,球棒的高精度量值溯源问题尚未完全解决。本文介绍并比较了国内外球棒球心距的几种测量方法,针对应用激光干涉法测量球棒球心距的方法,探讨了提高测量精度的几个相关问题。为我国建立球棒的专用校准装置,解决球棒的量值溯源打下基础。
球棒;球心距测量;坐标测量仪器的校准;激光干涉测量
0 引言
三坐标测量机(以下简称CMM)在测量领域的地位毋庸置疑。关节臂坐标机作为一种较新颖的无导轨测量仪器,因其便携性和测量灵活性也在工业测量领域应用广泛。而近几十年涌现出的激光跟踪仪、激光扫描仪以及照相式空间测量仪器,也因可动态测量、测量范围大、可获得空间点云的全部信息等各种特点不断推动着航空、风电等行业的快速发展[1]。因此,对上述仪器实施高精度的校准是提高仪器精密测量能力,进而推动我国装备制造能力的提高的有效手段。
球棒结构特殊,由两个高精度球体和一段低膨胀系数的杆件构成,其提供的标准距离是两球之间的球心距。所以成为校准CMM及关节臂测量机长度测量示值误差的最佳一维标准器。同时球棒标准器以及球棒结构的变形类标准器(将球棒两端的球更换为靶球或者靶标点),在校准激光跟踪仪、激光扫描仪以及照相式空间测量仪器等方面都具有极大的优势。
根据ASME B89.4.1M—1997,球棒和球板在美国是一种应用非常普遍的校准CMM的标准器[2]。德国VDI/VDE 2634 part2中,采用球棒摆放在仪器测量空间的各个位置,实现空间测量精度的校准[3]。美国NIST应用两端为特殊球形靶标的3m长球棒,开展激光扫描仪、激光雷达的性能评估[4]。我国的CMM国家校准规范JJF 1064—2000中提出用量块、步距规和球(孔)板对CMM的长度测量示值误差进行校准[5],但我国的国家标准中则未将球棒或球板列入其中[6]。原因之一就是球棒高精度量值溯源问题在我国尚未完全解决。
1 球棒球心距的测量方法
1.1 三坐标测量机校准法
当前测量球棒球心距的常用方法是用高精度的三坐标测量机实现,国际有基于CMM以及激光干涉仪校准球棒球心距的方案。在校准球棒时,首先通过CMM在球棒上打点建立坐标系,再调节球棒中心线与测量轴线平行,然后用激光干涉仪进行测量。虽然该方案采用激光干涉仪进行测量读数,但在测量中用到CMM调整球棒中心线,会引入CMM的测量误差及球测头的多方向触发误差,也不能避免阿贝误差,而且该方案测量时的调整过程非常耗时。另一方面,球棒和球板本身是校准CMM的标准器,用该方案校准也不甚符合量值溯源的原则。且高精度CMM非常昂贵,不适合个别企业标准实验室或者小型计量检测机构采用。
1.2 成像校准法
1999年在国际计量局(BIPM)组织的步距规与球棒的国际实验室的比对CCL-K5项目,包括德国、美国、中国、瑞士、日本等国家的最权威检测机构都参与了该比对活动。在该次比对中,中国计量科学研究院采用两坐标测量机以及CCD成像系统,通过对球棒两端球顶的瞄准,用激光干涉仪实现量值溯源,可以校准球板、球棒等长度标准器,该测量装置的原理如图1所示[7]。但是,这种方案中的球顶瞄准精度有限,受到成像光路限制,此装置后续并未用于球棒的实际校准业务。
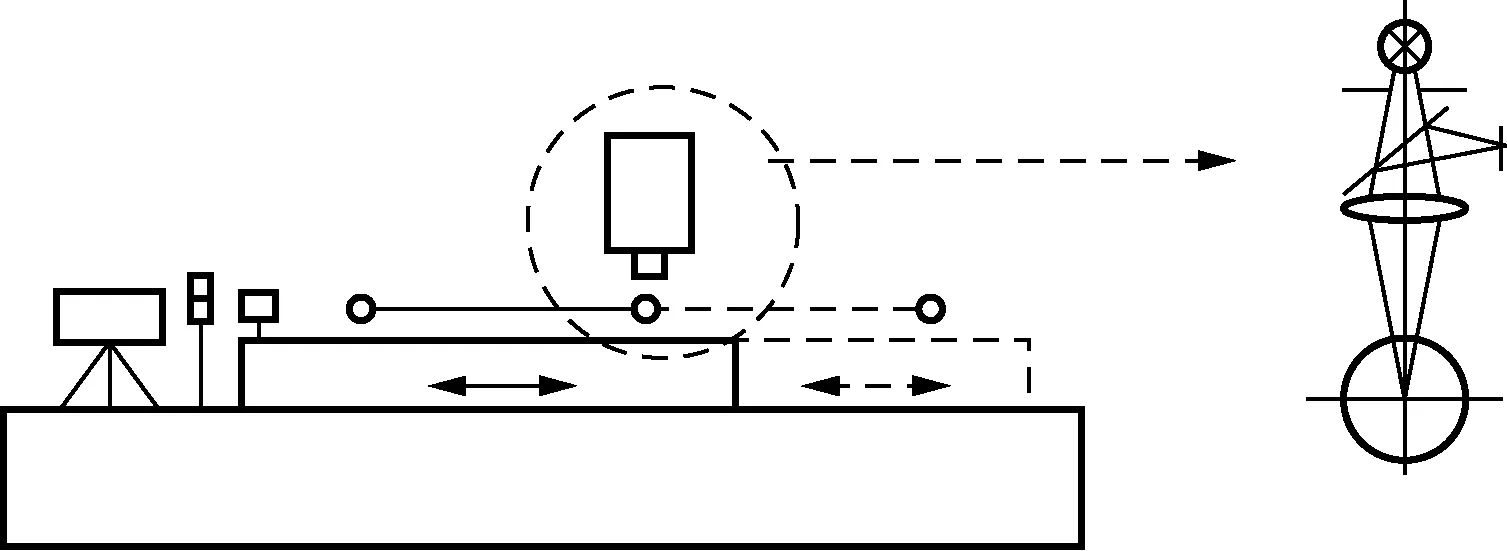
图1 球棒标准国际比对测量原理图
1.3 激光干涉仪直接校准法
NIST建立了一维花岗岩导轨,在其上安装一个固定工作台和两个固定有反射镜的滑动工作台,且三个工作台上均安装球棒支撑座,并在一维导轨的两端分别进行干涉测距,测量时分别把球棒放置在不同的两个球棒支撑座上,利用两端的干涉测距装置分别进行测量,即可获得球棒的球心距,可测量300~1000mm的球棒,测量不确定度可达U=0.2μm+0.2×10-6L[7](L为球棒球心距的值,单位为m)。
该装置无需用一个校准过的球棒再进行校准,而是直接溯源到波长,而且结构相对简单,成本较低。
总结以上3种测量方法,激光干涉仪直接校准的方法不确定度最小,成本相对较低,适合在我国各计量机构推广。
2 应用激光干涉仪直接校准球棒的相关问题探讨
综上所述,应用激光干涉仪直接校准球棒是最佳的球棒量值溯源解决方案,以下就针对此种测量方法对测量装置的要求,进行简要的分析和探讨。
2.1 测量原理
在计量领域,干涉测长的应用一般是一个维度上仅有一路干涉测距。而由于球棒结构的特殊性,应用激光干涉仪直接校准球棒的原理较为新颖。需要在一个维度上有两路干涉测量信号,并使两光路的光轴重合。
如图2所示,在一维花岗岩导轨上安装一个固定工作台和两个固定有反射镜的滑动工作台,且三个工作台上均安装球棒支撑座(球座)。把球棒放置在不同的两个座上,利用一维导轨两端的干涉测距装置分别进行测量,即可获得球棒的球心距。具体测量过程[8]:
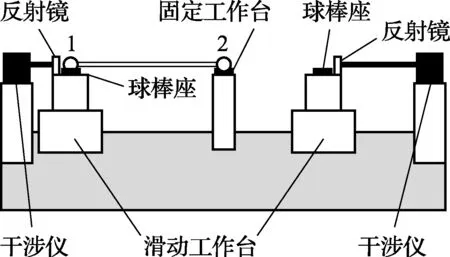
图2 激光干涉法测量球棒原理示意图
1)把球棒末端的球分别放在左侧滑动工作台的球座上和中心固定工作台上的球座上,初始化左端的干涉测量信号为零。
2)保持球棒左端的球在左侧滑动工作台的球座上,移动球棒的最右端到右侧滑动工作台的球座上,同时初始化右端的干涉仪为零,记录左端的干涉仪测得的位移为a。
3)保持球棒右端的球在右侧滑动工作台的球座上,将球棒的左端移动到中心固定工作台的球座上,记录右端干涉仪测得的位移为b。
4)球棒的球心距为L=a+b。
基于该测量原理,在检测装置的设计和装校上就需符合阿贝原则,保证干涉测量轴线与球棒的轴线和滑动运动台运动的轴线重合,从而最大限度地减小余弦误差。
2.2 激光干涉仪的选择
采用两台激光干涉仪分别进行两路测试可以方便的按照上述原理实现测量功能。但是,在测量不确定度评定时,两台激光干涉仪的波长稳定性误差均会引起测量误差。而光源引入的误差是除了温度影响、环境影响之外的一个较大的不确定度分量。因此,采用一台激光干涉仪,进行分光后,使用两个接收器进行测量,则仅有一个光源引入的不确定度分量,会在一定程度上提高检测装置的测量精度。
2.3 测量导轨的结构
测量类导轨形式众多,有V型槽结构、滚珠导轨结构、滚柱导轨结构以及气浮平面导轨结构。因测量过程中需要滑动工作台不断的滑动,为提高导轨稳定性和耐磨损性,需尽量考虑采用花岗石气浮导轨的结构。
花岗石导轨梁的尺寸需要经过一定的模拟设计,以防止由于球棒的重量和运动部件造成的花岗石挠度变形引起微小的测量误差。
两个滑动工作台需要采取悬浮的形式,并具有一定的运动灵敏度,以便于球棒上的球与球棒支撑座稳定接触后能进行的轻微滑动。
根据上述的测量原理,一次测量只需在导轨上几个特定的位置点完成,避免了工作台在导轨上长行程的滑动,可最大程度上减小导轨直线度误差的影响。这在一定程度上降低了对导轨直线度的要求。因此在满足球棒轴线与测量轴重合的前提下,导轨直线度满足2μm/m, 由导轨直线度误差引入的余弦误差在不确定评定的过程中可忽略不计。
2.4 球棒的支撑
应用球座对球棒的球进行支撑,一般采用三点支撑的形式。三点的高低如不在一个水平面上,会导致球心的投影偏离三个支撑点所在的圆心,从而给测量结果带来一定的余弦误差,这在球座的制作过程中是很难避免的问题,而这一问题可以在球座的装校过程中予以解决。在球座装校时,需要用到一个与所测球棒直径相同的高精度钢球,或直接采用可组装式球棒的钢球。将三个球座沿x方向固定在同一基准面上,分别将钢球放置在三个球座上,并调整球座,直至三个球座上钢球的球顶至基准面的高度差在微米量级,同时球顶的三个y向位置偏差在微米量级。此时,即使由于球座上三个支撑点的因素导致单个球心的投影偏离三个支撑点所在的圆心,但球座上钢球两两之间的连线与干涉测量轴的偏差已调校至微米量级,由余弦误差引入的测量不确定度几乎可以忽略不计。而且此项工作可以方便的在三坐标测量机上完成,无需复杂的装校工具。此外,提高球与球座相互接触的重复性精度,也是提高测量精度需考虑的一个问题。
根据最小变形原则,长球棒在校准过程中,除了用球座支撑2个球体外,也需要在球棒杆处增加两个支撑点,支撑位置选择贝塞尔点,即距球棒杆两端0.2203L的位置,保证在重力的作用下,中心轴上长度变化量最小 ,减小校准误差。
3 总结
综合比较国内外球棒球心距的几种测量方法,应用激光干涉法测量球棒球心距方法相较于成像测量法,可在原理上实现较高的精度,将球棒球心距直接溯源到激光波长;相较于CMM测量法,在高精度的球棒校准方面更加符合量值溯源的规则,且成本相对较低。但要采用激光干涉法实现球棒球心距的测量,在干涉光路的搭建、导轨平台的结构设计以及球棒支撑座的设计和装校方面,还有许多需要考虑的问题,才能实现高精度的校准。在我国建立高精度球棒的专用校准装置,对推动球棒标准器在我国的广泛应用,适应快速发展的测量仪器的校准需求,解决我国精密计量领域中的量值传递、丰富测量手段,都具有较高的技术价值。
[1] 刘芳芳, 傅云霞, 余培英,祝逸庆. 大尺寸空间计量仪器的应用与校准.计量技术, 2012(6):50-53
[2] ASME B89.4.1M-1997. Methods for Performance Evaluation of Coordinate Measuring Machines, ASME, New York, 1997
[3]VDI/VDE 2634 Part 2, Optical 3-D measuring systems Optical systems based on area scanning
[4] Geraldine S. Cheok, Alan M. Lytle, and Kamel S. Saidi,Status of the NIST 3D Imaging System Performance Evaluation Facility, Proc. SPIE 6214, Laser Radar Technology and Applications XI, 62140F, May 19, 2006
[5] JJF 1064—2000《坐标测量机校准规范》
[6] GB/T 16857.2—1997 eqv ISO 10362—2:1994坐标计量学 第2部分:坐标测量机的性能评定
[7] 裴丽梅, 杭伟, 杨自本, 王正强,球棒校准国际比对.现代计量测试,2001(1):37-40
[8] John Ziegert, David Rea, Steven D. Phillips, Bruce Borchardt, John Stoup, Design and Testing of a One Dimensional Measuring Machine for Determining the Length of Ball Bars. Proceedings of the 2001 Annual American Society of Precision Engineers Conference, 2001
10.3969/j.issn.1000-0771.2015.12.17
