基于激光调频外差干涉的位移量精密测量系统研究*
2015-06-09武宏璋
张 娟 王 凯 武宏璋
(西安计量技术研究院,西安 710068)
基于激光调频外差干涉的位移量精密测量系统研究*
张 娟 王 凯 武宏璋
(西安计量技术研究院,西安 710068)
通过对日常计量检测工作的深入了解,提出研制一款具有微型化、集成化、智能化、标准化、自动化特点的位移量精密测量系统。该系统以激光调频外差干涉测量技术为基础,在此基础上设计了系统的总体功能架构、光路原理和测距信号计算模型。
计量检测;位移量精密测量;激光调频外差干涉
0 引言
近年来,我国装备制造业持续高速发展,产品的质量、精确度、生产工艺不断提高。为适应科学技术的不断发展和高精度先进仪器对计量、校准工作的需求,作为法定计量技术机构,我们必须不断提升自身的检测能力,为当地经济、社会发展提供更加有效的服务[1]。
通过对我院长度检测中心日常计量检测工作的深入研究,发现位移量精密测量在装备制造业中具有广泛的需求和越来越高的要求。为有效解决长度检测中心在对位移量检测过程中遇到的读数过程繁琐、测量精度低、测量时间长、人为主观误差大和无法现场快速判断等方面存在的问题,在对激光调频外差干涉测量技术进行深入研究后,提出研制一款具有微型化、集成化、智能化、标准化、自动化特点的位移量精密测量系统[2-3]。
1 系统总体设计
位移量精密测量系统的设计是基于激光调频外差干涉测量技术。通过对激光源进行连续调频,并将此调频光束输入至测量系统内部的两个干涉子系统,一个为参考干涉系统,另一个为测量干涉系统,两子系统共同处理干涉信息,以单片机为控制核心,配合相关硬件电路,进行信号采集与数据处理,完成对被测物体或设备位移量的自动测量。
1.1 主要设计原则
1)无损原则:测量系统的设计考虑到被测物体或设备的自身功能,应尽量采用外挂、间接结合等方式参与测量,不损坏设备的自身结构。
2)便捷性原则:由于被测物体或设备的工作方式不一样,测距设备应尽量轻巧便携,与被测设备的工作方式较好地吻合。
3)高稳定性原则:系统的高稳定性体现在两个方面,一是多次测量的数值具有较高的精度与可信度;二是测量设备的固定精度应远远高于设备的测量精度,以保证测量结果的真实性。
1.2 主要技术目标
测量距离:1~5m;测量精度:0.01mm;调频激光中心波长:632nm;干涉光束质量因子:M2<1.2;激光外差频率范围:Δf<80MHz;探测器光谱响应范围:400~1100nm;响应度:0.5A/W;响应时间:0.55ns。
1.3 总体功能架构
测量系统的主要功能包括:激光调制发射模块、参考干涉模块、测量干涉模块、光电探测接收模块、频率综合模块、数据处理模块等。两个干涉模块将各自接收到的光信息,通过测频、混频进行比较、运算,最终得到物体的距离信息[4]。总体功能架构如图1所示。
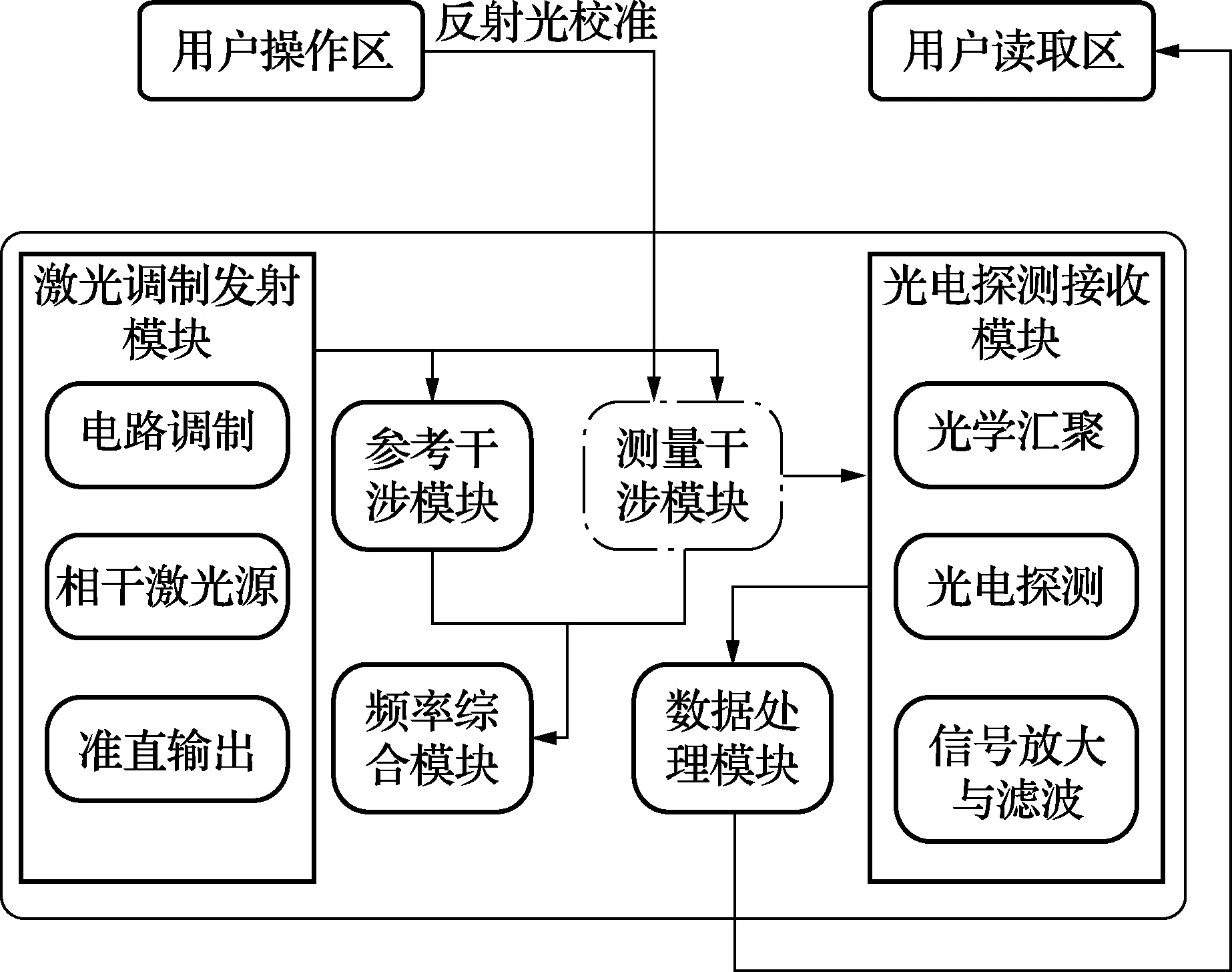
图1 激光调频干涉测距系统总体功能架构图
测量系统整体功能架构体现了无损、便捷、高稳定性的设计原则,不需要复杂的人机交互,用户只需要简单的反射光校准操作,就可以实现快速的数据读取。反射光校准主要保证激光照射在被测物体的反射表面时按照原光路返回至系统参与干涉。其中测量干涉模块用虚线标出是因为它不仅包含了测距系统本身,也包含了被测物体的信息,即被测物体反射回来的激光进入干涉系统共同构成了测量干涉模块。用户整个工作流程如图2所示。

图2 用户工作流程图
1.4 光路原理
测量系统光路原理如图3所示,其中带箭头部分为光束传播路径,该光路图由两个迈克尔逊干涉仪构成。激光通过PZT调制电压源来控制激光输出频率的变化,将频率微变化的光在光阑后的半透半反镜片处分为两路,一路向上传输通过一个分光棱镜和一个角锥棱镜将光束反射如光电探测器PD2。同时,水平传输的一路出射至固定于外部被测表面的角锥棱镜,返回的光路经过分光棱镜进入光电探测器PD1,两路信号分别进入测频系统来估算两束光干涉的拍频量,利用拍频量来计算被测物体的距离。

图3 光路原理图
2 测距信号计算模型
测量系统采用线性调频激光双干涉测量距离。其中线性调频激光绝对距离测量是继多波长激光绝对距离测量之后出现的新技术,它以半导体激光器为调频光源,半导体激光器的光谱线宽一般大于几十兆赫, 相干长度很强, 所以线性调频激光绝对距离测量范围在几米以内,并且具有很高的分辨率,即测量精度[5]。
半导体激光器出射光的频率随时间按三角波规律变化, 射入臂长不相等的迈克耳逊干涉仪中。在三角波的直线上升和下降段内, 调频激光的频率可分别表示为:
fup(t)=f0+at和fdown(t)=f0-at
式中,f0为激光中心频率;a为激光频率调制率。于是,干涉仪中两相干光波的相位差为:

式中,d为干涉仪两臂长度差;c为真空中光速。
由于入射激光频率线性连续变化,干涉仪在参考镜和测量镜均静止的状态下输出一个交变光信号,通常称之为光拍。光拍的强度为:
式中,I1(t)和I2(t)是激光频率调制引起的光强变化。由上式可见,光拍的频率为:
fb=2ad/c
即光拍频率与干涉仪两臂长度差成正比。
将调频激光同时射入两个迈克尔逊干涉仪中,一个用以测量距离,一个用以提供参考。测量干涉仪的两臂长度差dm为被测距离;参考干涉仪的两臂长度差dr固定不变,为参考距离。由以上分析可得两个拍频信号:
fbm=2adm/c和fbr=2adr/c
由此可得到测距公式:
由于参考距离dr为已知,所以通过分别测量两个干涉仪的输出光拍频信号频率,即可直接得到被测距离,实现无导轨距离测量。
利用两个频率的拍频量以及参考干涉系统的工作距离来计算,测量精度取决于拍频量的调制度,将拍频调节至100kHz,这与激光的1GHz频率来说占比非常小,因此可实现较高的测量精度。
3 应用工作平台设计
测量系统由激光干涉测量系统与用于反射的角锥棱镜组成。在测量时,应保证角锥棱镜的安装稳定性,使得其反射光顺利反射回测距仪进行干涉。因此在应用平台中应设计了一组激光校准光路,保证射激光与返回激光束同轴。
3.1 系统测量方式
系统的测量应方式有两种。图4(a)主要用于导轨之间的水平位移测量。首先,激光干涉测量系统被固定于被测物体或设备一侧相对稳定的平面上,保证激光束照射被测表面时无阻挡,将角锥棱镜固定在被测表面,用以反射干涉仪出射的激光。角锥棱镜的固定座也需固定在被测面上,并且设计有微调装置,可调节角锥棱镜的俯仰与偏摆角度,使得光束能够沿出射光轴返回参与干涉计算。图4(b)主要用于拉力机等垂直方向的位移测量,其中M2为反射镜,M1为固定在被测表面的角锥棱镜,同样调节角锥棱镜的方位角,使得光束正确返回。
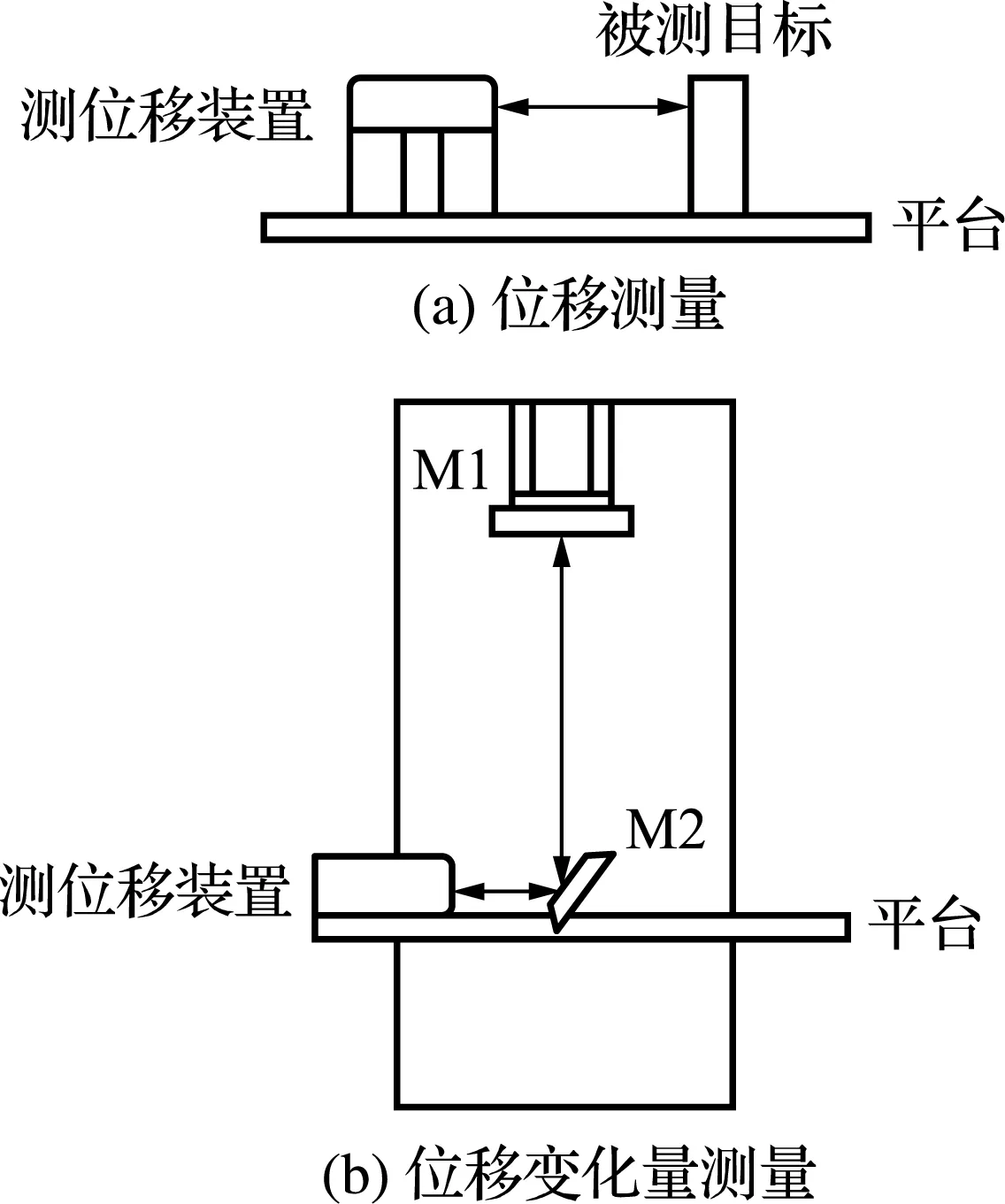
图4 测量设备工作平台
3.2 反射光校准
在被测物体或设备上安装角锥棱镜,测量干涉仪的光束出射后经其反射回光路。首先,在角锥棱镜的基座应设计轻便的方位、俯仰调节装置,保证光反射方向可调。其次,在光束出射端应设计回光校准装置,其校准示意图如图5所示。

图5 返回光校准光路
校准光窗口处进行人眼观测,当反射光进入接收窗口,并且在校准光处有光束反射出来时,说明光束已调整完毕。
4 结束语
目前该装置的前期理论研究、系统设计,原型系统开发工作已经基本完成,在我院长度检测中心进行了大量的现场实验,达到了设计的主要技术目标,同时极大地提高了检测工作的效率,有效地减轻了检测人员的工作量,取得了良好的应用效果。
[1] 国务院颁布.“十二五”计量发展规划.2013
[2] 于梅,孙桥.外差式激光干涉仪应用于正弦直线和旋转振动测量技术的研究.计量学报,2005(3)
[3] 孙长库,何明霞,王鹏.激光测量技术.天津大学出版社,2008
[4] 杨珅,荣强周,忽满利,等.基于Michelson干涉仪的高灵敏度光纤高温探针传感器.物理学报,2013,62(8)
[5] 陈千颂,杨成伟,等.激光飞行时间测距关键技术进展.激光与红外, 2002,32(1)
*陕西省质量技术监督局科技计划项目,编号:2014KY06
10.3969/j.issn.1000-0771.2015.12.05
