基于HMM-PNN模型的助推段目标类型识别
2015-06-09樊建鹏程洪玮司马端
王 普,樊建鹏,程洪玮,司马端
(1.国防科技大学电子科学与工程学院,湖南长沙410073;2.北京跟踪与通信技术研究所,北京100094)
基于HMM-PNN模型的助推段目标类型识别
王 普1,樊建鹏1,程洪玮2,司马端1
(1.国防科技大学电子科学与工程学院,湖南长沙410073;2.北京跟踪与通信技术研究所,北京100094)
针对卫星视野下导弹目标的识别问题,将经典隐马尔科夫模型(HMM)识别算法应用在助推段目标类型识别上并加以改进。首先,分析了通用弹道助推段运动特性,确定了不同射程导弹的分类依据。其次,针对HMM模型时序特性差异较小而引起的识别率低的问题,引入概率神经网络(PNN)与HMM模型相结合的结构算法,该方法整合了HMM模型的时间序列数据处理能力和PNN的自学习能力、贝叶斯决策理论,对不同射程导弹目标实现了分类识别。仿真实验结果表明该算法是一种有效的导弹目标识别算法,识别率优于传统的HMM模型方法,误判率较低,且易于工程实现。
HMM-PNN模型;助推段弹道模型;时序特征;目标识别
0 引言
导弹防御中,在敌方导弹发射后数十秒实现导弹类型初步识别是十分重要的。但目前的导弹目标识别大多是基于雷达平台,当来袭导弹目标处于助推段时,常规的预警雷达由于自身盲区限制探测不到目标,而星载探测器则可以探测到目标,并通过多星关联和连续观测实现对目标的定位和跟踪,从而得到助推段弹道和辐射数据。如果能从中进行目标识别,则可以提高识别的实效性。但是受探测器条件限制,目前利用尾焰辐射信息只能粗略识别小射程战术导弹和远程洲际战略导弹,对于射程较小的弹道导弹识别效果不好,识别率低。本文重点研究单从运动特性上识别不同类型导弹的可能性问题。
文献[1]提出了基于导弹预警卫星系统的目标识别算法,利用导弹发射点位置、导弹尾焰红外特征和关机点特征三个状态量特征进行不同类型导弹的识别。该算法中关机点参数的判别权值最大,对其准确度要求很高。文献[2]通过隐马尔科夫模型(HMM)来分别不同类型的弹道导弹,该算法主要利用中段弹道数据差异性进行分类,无法实现助推段早期快速识别。本文对三种不同类型的导弹弹道助推段数据进行分析,发现其运动特性差异,特别是后助推段速度大小等特征量差异明显,这使得在助推段对来袭导弹目标进行初判决成为可能。并在前文研究的基础上,改进了HMM对差异不明显的模式辨识能力差的缺点,引入概率神经网络(PNN)和HMM进行结合,利用PNN进行后验概率的估计,对HMM误判的识别结果进行修正,将改进算法应用在助推段导弹目标类型识别中。
1 助推段运动模型分析
助推段是指导弹从发射到发动机关机所持续的过程。助推段导弹受力复杂,很难用模型准确地描述。导弹发射后向上作垂直运动,随后在制导系统控制下依照程序缓慢转向目标方向,得到预定的最佳抛射角,最后瞄准直到发动机关机。此时,导弹射向基本保持不变,通过控制不同的关机时间来控制射程以及落点[3]。
不同类型导弹的助推段弹道运动特性的差异主要在于发动机推力作用的不同,弹道导弹发动机推力可表示为:

式中,Pst为发动机推力,Se为排气速度,pe、pH分别为排气端面气压和外部大气压。由(1)式可知,发动机推力的大小由燃料燃烧喷出气体的速度和排气端面的气压差决定,额定射程的导弹受上述因素的影响而使得各自的推力不同。对助推段导弹进行受力分析,由牛顿第二定律可得出导弹的动力学方程如下:
ma=Pst+mg+R+Fc+F'k+F'rel(2)式中,pst为发动机推力静分量矢量,R为导弹气动力矢量,Fc为导弹控制力分量矢量,F'k、F'rel分别为附加哥氏力和附加相对力。
设ECF坐标系下状态变量为:
式中,r,v,a分别是目标位置矢量、速度矢量和加速度矢量。典型的弹道导弹基本保持零攻角,推力与相对速度矢量平行,因此遵循重力转弯弹道,则目标运动方程为:

在助推段,导弹主要在大气层内飞行,导弹受到推力、大气阻力和地球引力的作用,根据导弹发动机燃料及构造的不同,推力也有很大变化。从上述分析可知,对于不同射程弹道导弹,其推力的大小与持续时间的差异性会导致目标在位置、速度和加速度大小上的不同,受探测及跟踪精度的限制,单个点的差异可能会有较大的误差并显示出一定的随机性,因此试验中选择助推段一段时序数据,其差异性较单个点明显,理论上可以提取出用以区分上述不同目标的时序特征向量。
2 HMM-PNN模型与算法
HMM-PNN模型是HMM模型与PNN模型整合改进的结果。导弹弹道运动参数可以看作若干个参数表示的N维时序集合Q={q1,q2,……,qn},由于HMM模型具备时序建模与推理能力,可用于对弹道的时序分量进行建模。PNN融合了密度函数估计、贝叶斯决策理论以及神经网络强大的自学习能力,但是不具备时序建模能力。此外,对于助推段,导弹目标的弹道差异性并不会像中段那样明显,HMM概率计算的随机性与训练样本数目不足会使计算概率与实际结果不相符,导致识别率不高,误判明显。而PNN可以最大程度地利用误判先验知识,按贝叶斯最小风险准则将输入向量分到具有最大后验概率值的类别中去,因此将两者结合起来可以提高识别效果[4]。
通过以上的分析,本文将HMM模型的时序建模能力与PNN相整合,对弹道建立模型,其结构图如图1所示。
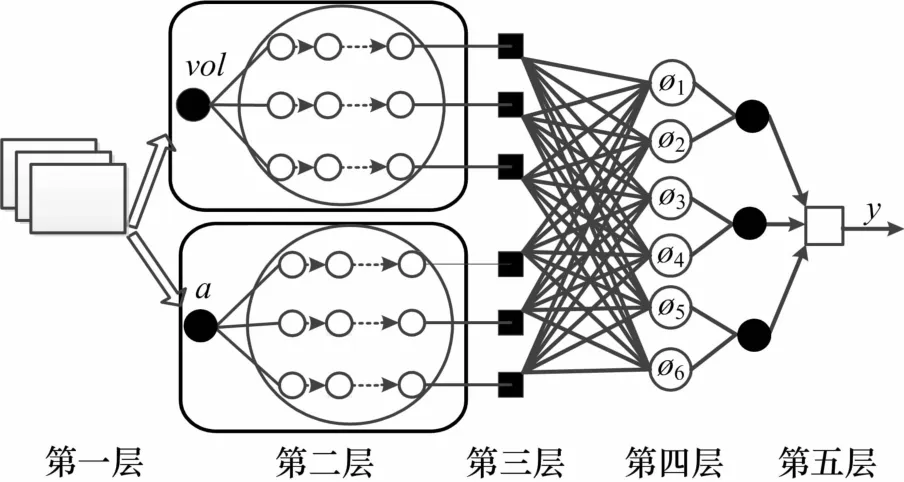
图1 HMM-PNN模型结构图
如图1所示,HMM-PNN模型包括五层结构,分为两大环节,其中第一层和第二层为HMM时序建模环节,第三、四、五层为概率神经网络模型环节。
时序建模环节主要体现的是利用弹道时序特征对不同类弹道建模的过程。本实验中,初步设定有三类不同射程导弹,即对于每一种输入特征向量,都有三条不同的马尔科夫链对应三种不同的弹道,特定类别的HMM模型关于该类别弹道数据具备的似然概率最大,由此得到如图2所示HMM层的隐马尔科夫结构模型,其中上半部分为速度特征向量对应的模型vol-HMM,下半部分为加速度模型a-HMM,其他模型定义以此对应。目前关于HMM类型选择没有统一的规则方法,但根据导弹的运动特点,本算法采用的结构是left-right形式的Bakis模型,Bakis模型的拓扑结构简单、参数较少、训练过程简单快速、较容易收敛,是目前研究较多且较成熟的类型[5]。

图2 HMM模型示意图
模型建立后需要对模型进行训练与可靠性验证,通常为了使不同样本都适用于该模型,需要对输入时序序列进行量化处理,本文用到的k均值量化算法的基础是最小误差平方和准则,其代价函数为:

利用迭代均值把样本时序数据量化到0~k之间,为了为加快算法的训练速度,本实验中k值与观测数一致。k值的选择根据时序数据维数大小决定,太小影响识别精度,太大则会导致概率计算迭代不收敛。
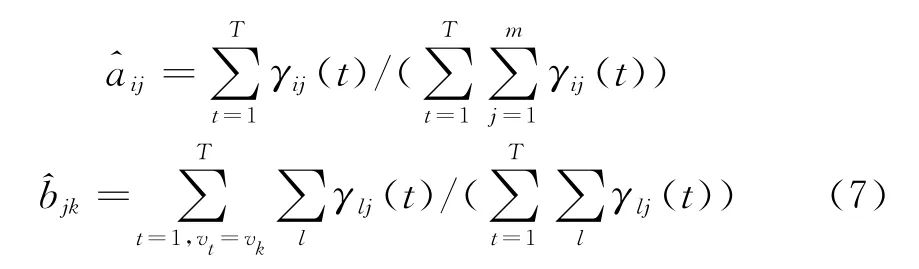
HMM模型的训练即在已知训练样本观测序列O =(o1,o2,…,oT)的情况下,估计模型λ=(π,A,B)参数:隐状态序列的转移概率{aij}和可见状态序列的产生概率{bjk},使得在该模型下观测概率p(O/λ)最大。Baum-Welch算法是基于最大似然估计的思想,可见序列v条件下从隐状态ui(t-1)转移到ui(t)的概率γij(t)为:

式中,αi(t)、βj(t)分别为在t时刻位于隐状态ui且已产生了到t时刻位置的可见序列概率和已产生了t时刻之后的可见序列概率。公式(7)给出了隐状态ui到uj的转移概率估计ˆaij,隐状态uj产生显状态vk的概率估计ˆbjk,通过递归方式更新参数估计,从而得到更利于样本序列出现的模型参数。
训练完成后,通过计算训练样本在模型λ=(π,A,B)下出现的概率p( O|λ)来判断模型的可靠性。前向算法根据训练的模型参数,利用递推公式(8),计算到t+1时刻部分观测序列为o1,o2,…,ot,ot+1且在时刻t+1处于qi的前向概率,再利用公式(9)计算出p(O/λ)。
式中,i=1,2,…,N。根据对应马尔科夫链输出前向概率的大小来判断类别[6]。
以上介绍了时序建模的过程以及利用经典HMM完成识别的算法。然而,该算法是针对单个特征向量的识别,对助推段小差异性特征识别率不高,因此本文算法在此基础上,对多个时序特征HMM模型的输出进行特征融合,将其输入PNN模型。
神经网络识别环节中,第三层为隐含层的径向基层,径向基层中每一个神经元节点拥有一个中心,该层接收输入层的样本输入,计算输入向量与中心的距离,最后返回一个标量值,该层中所确定的输入/输出关系式定义如下:

求和层各单元只与相应类别的模式单元相连,并把隐含层属于同一类的隐含神经元的输出做加权平均:
式中,i为训练样本的总类数,φij是第i类样本的第j个中心,L表示第i类的神经元个数。最后估计各类的概率,求和层神经元个数与类别数一致。输出层取求和层中最大的一个作为输出的类别:

利用样本数据对神经网络的各神经元权值和阈值进行训练,最后利用测试数据验证网络。HMM-PNN算法详细步骤为:

step 2量化后序列用aij(l-1)和bjk(l-1)估计ˆaij(l)和ˆbjk(l);
step 3对于估计值aij(l)和bjk(l),若aij(l)-aij(l-1)、bjk(l)-bjk(l-1)小于阈值θ,转到step 4,否则转到step 2;
step 4返回aij和bjk,计算前向概率;
step 5融合不同特征模型的输出概率作为PNN输入,对PNN进行训练、测试;
step 6结束,输出识别结果y。
3 仿真实验
由于缺乏导弹实测样本数据,本实验数据来源于导弹六自由度弹道模型的仿真。实验验证上文中关于助推段弹道的理论,确定分类的依据。通过识别率、识别时间等试验结果验证本文算法。
3.1 助推段特性验证分析
卫星首次探测到目标发射,加上跟踪、滤波预处理等,接收到估计数据为数十秒左右,而弹道导弹的关机点大概为120~200s左右,助推段时间较短,给特征提取带来了困难,通过对助推段弹道估计数据进行分析,证明助推段不同射程导弹的可区分性。
实验选取800~1200km、2300~2700km、3500~4000km射程的三类导弹共900个弹道数据,每组数据采样率为1 Hz,滤波输出的数据各加上一定大小的随机噪声误差。首先验证部分数据的真实性,图3表示通用弹道射程r、高度h、速度v、加速度a的一般特性,并比较了整个弹道的三种特征的特性差异,可以看出从整个弹道来说,助推段差异不明显,显示出的是中段明显的差异。但是单从助推段来说,三类不同射程的导弹运动特性也存在差异性。
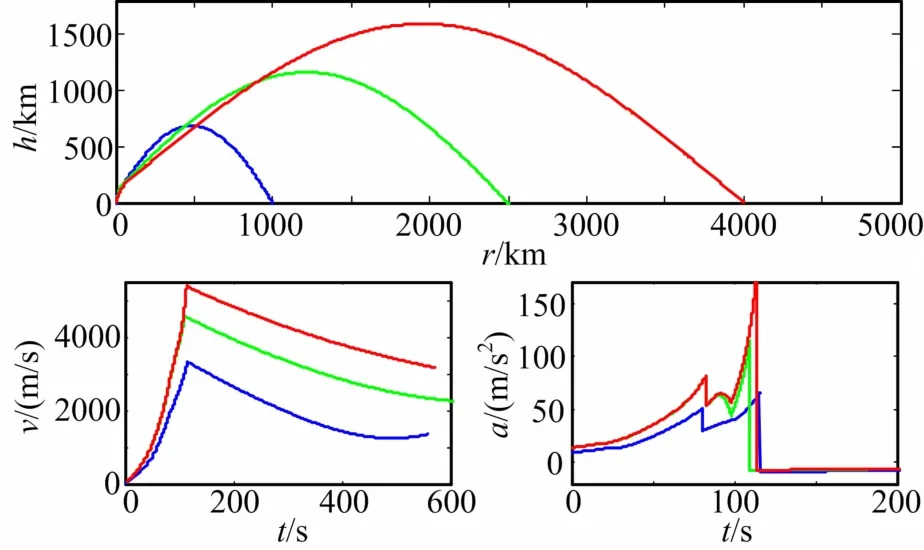
图3 弹道特性对比图
图4 中分别表示目标在助推段的位置、速度和加速度大小特性曲线,由此可以发现对于不同射程的弹道导弹,在助推段里,距地心的距离h、速度v、加速度a大小有差异性,与前文理论设想相似,但距离曲线在整个助推段没有一致差异性,究其原因在于没有考虑到影响地心距离的抛射角、弹道倾角等因素的作用。
速度、加速度大小曲线显示这三类不同射程运动特性中有一致的可区分差异性,符合前文理论分析。此外低射程弹道与其他两种射程导弹的差异性明显,而后两种射程导弹差异性较小,分析认为可能与不同射程的建模不一样有关。
3.2 算法仿真
在仿真计算机CPU为Core2 Duo E7400、2.79GHZ,内存为4GB的情况下,使用Matlab工具进行仿真计算。
仿真实验中,数据选取为助推段41~100s数据。π设为[1,0,0,0,0,0,0,0],A和B采用随机数获得。神经网络调用神经网络工具箱默认的概率神经网络,spread值设为1.5。本实验首先对原算法进行验证,各用200个样本数据,首先用各类100个数据训练对应HMM模型参数,训练完成后利用剩余的各100组数据进行测试,仿真如图5所示。真实值和期望值曲线重合度越高代表识别效果越好,则可以看出对第一类样本的识别率较高,第二、三类样本的识别率偏低,且第二、三类容易相互误识别。究其原因在于,第一类与第二、三类特性差异性明显,而第二、三类虽有差异但是较小,加上HMM的局限性,导致识别率较低。
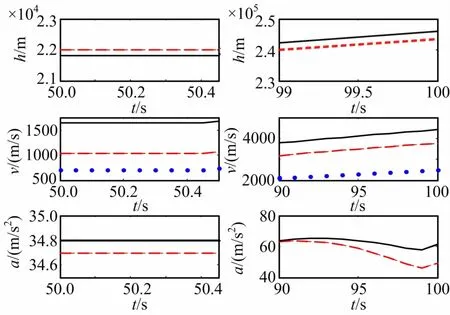
图4 助推段特性差异对比图

图5 HMM模型识别结果
接下来验证HMM-PNN模型,由于HMM-PNN模型需要HMM参数的训练和概率神经网络训练,为了保证两次实验的一致性,选取三种弹道各200个弹道时序数据,同样选取各类任意100个数据训练HMM模型参数,训练完成后,选取剩余的各类任意100个数据输入到训练好的HMM模型计算前向概率p(O/λ),将输出的100组输出概率融合数据用来训练概率神经网络,完成HMM-PNN模型的训练过程。将剩余各类100个数据作为测试数据,输入到训练好的HMM-PNN模型,识别结果如图6所示。
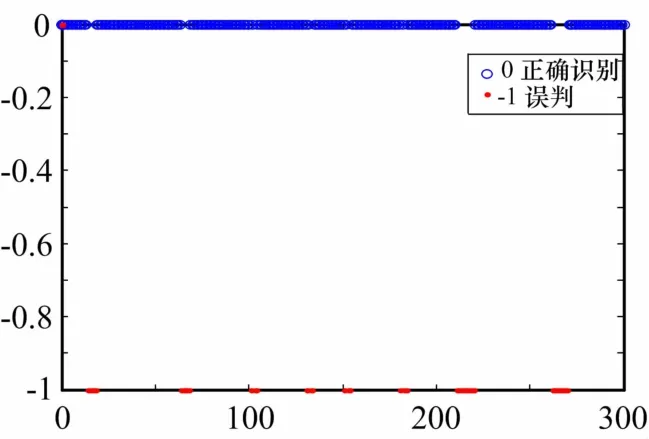
图6 HMM-PNN输出识别效果图
图6 显示HMM-PNN模型的识别效果,“-1”代表误判,识别率明显比HMM模型高,可见算法的有效性。表1给出了分模块速度HMM模型vol-HMM和加速度HMM模型a-HMM的识别率,以及HMM模型平均识别率与本文算法识别率的对比情况。
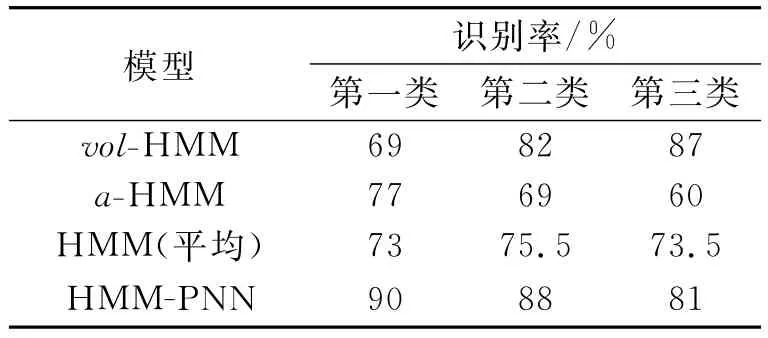
表l 本文方法与传统HMM识别率对比
仿真实验结果表明,本文算法识别率较传统HMM算法有较大提高,使得弹道识别有较高的准确性。诚然,两层结构模型牺牲了一定的实时性,但在离线样本数据库训练完成的情况下,本文算法中PNN单层网络在线识别过程耗时0.0527s,整个算法样本在线识别过程耗时0.1577s,因此HMM-PNN模型识别算法满足对助推段不同射程弹道识别的准确性与实时性要求。
4 结束语
本文初步分析了导弹助推段模型运动特性并用仿真试验进行了验证,以不同射程导弹两个运动时序特性的差异性为依据,将HMM-PNN模型算法运用在助推段不同类型导弹的识别上,对来袭目标进行了初判别。并依托导弹运动模型,进行了相关的仿真实验,仿真结果表明该算法能够有效识别出不同范围射程的导弹目标,与传统中段弹道导弹识别相比识别率较高,能较早地识别出来袭目标。但是,本实验中助推段提取时序特征较少,对弹道的描述不够完整,还有待进一步研究。■
[1] 赵延,姚康泽,等.导弹预警卫星目标识别算法研究[J].系统工程与电子技术,2005,27(10):1811-1813.
[2] Singh Uk,padmanabhan V.Training and classification of ballistic missiles using Hidden Markov Model[C]∥Contemporary Computing(IC3),IEEE 2013 Sixth International Conference,2013:301-306.
[3] 曹贺.基于天基预警系统的导弹助推段弹道估计算法研究[D].哈尔滨:哈尔滨工业大学,2006.
[4] 飞思科技产品研发中心.神经网络理论与matlab7实现[M].北京:电子工业出版社,2005.
[5] 王西颖,戴国忠,等.基于HMM-FNN模型的复杂动态手势识别[J].软件学报,2008,19(9).
[6] 李航.统计学习方法[M].北京:清华大学出版社,2012.
Trajectory classification based on HMM-PNN model in boost phase
Wang Pu1,Fan Jianpeng1,Cheng Hongwei2,Sima Duan1
(1.College of Electronic Science and Engineering,National University of Defense Technology,Changsha 410073,Hunan,China;2.Beijing Institute of Tracking and Telecommunication Technology,Beijing 100094,China)
An algorithm of trajectory classification based on classical Hidden Markov Model for early warning satellite system is established and improved in boost phase.First,the classification basis established by analyzing the time sequence property of the normal boost trajectory.Then,an structure algorithm combined HMM model with PNN model is introduced to solve the question of low rate of recognition caused by the less obvious difference among the trajectory,which integrated the capacity of time sequence processing for HMM and the Bayesian decision theory for PNN.Feasibility and effectiveness of the algorithm is verified by simulation experiments.Analysis of the result shows that its performance is remarkably improved compared to traditional HMM method,with its implementation suitable for engineering fulfillment.
H MM-PNN model;trajectory model;time sequence property;target recognition
TN971;V474.2+7
A
2015-03-20;2015-07-01修回。
王普(1991-),男,硕士研究生,研究方向为空间信息获取与处理。