高斯粒子PHD滤波的多个弱小目标TBD算法
2015-06-01李翠芸曹潇男廖良雄
李翠芸,曹潇男,廖良雄,江 舟,2
(1.西安电子科技大学电子工程学院,陕西西安710071;2.中国人民解放军95972部队,甘肃酒泉735018)
高斯粒子PHD滤波的多个弱小目标TBD算法
李翠芸1,曹潇男1,廖良雄1,江 舟1,2
(1.西安电子科技大学电子工程学院,陕西西安710071;2.中国人民解放军95972部队,甘肃酒泉735018)
针对现有多个弱小目标检测前跟踪(track-before-detect,TBD)算法存在的跟踪精度低,算法复杂度高等问题,提出一种新的基于概率假设密度(probability hypothesis density,PHD)的TBD算法。所提算法通过高斯粒子滤波对PHD中的各高斯项进行递归运算、进行多帧能量累积,并提取高斯项的均值为目标的状态,达到检测与跟踪多个弱小目标的目的。算法在随机集滤波框架下完成未知数目的多个弱小目标跟踪,不仅充分利用粒子滤波的非线性估计能力,同时避免了传统算法利用模糊聚类进行目标状态提取所带来的跟踪精度低等问题。仿真结果表明,所提算法与传统方法相比,在降低算法复杂度的同时,对多个红外弱小目标具有更加良好的实时检测和跟踪性能。
检测前跟踪;概率假设密度;高斯粒子滤波;红外图像;多目标跟踪
0 引 言
近年来,基于红外探测和成像的武器系统成为各国军事领域研究的重点。目标成像面积较小,且远距离检测和跟踪,信号能量经过长期的衰减,再加上复杂背景的干扰,目标被大量噪声所湮没,导致目标信号图像信噪比低,既而无法采用传统的检测方法从单帧图像中探测出弱小的目标。此时检测前跟踪(track-before-detect,TBD)技术直接使用原始图像,在检测前引入跟踪滤波思想,利用目标的运动状态信息辅助检测,通过多帧能量累积实现对弱小目标的检测与跟踪。TBD的具体实现方法很多,主要有基于Hough变换的TBD方法[1]、动态规划TBD方法[2]和粒子滤波TBD以及其改进方法[47]。然而对于多个目标的TBD问题,不仅需要解决单目标TBD的高度非线性问题,同时还要解决多目标跟踪中的数据关联问题,一直以来都是TBD问题研究的难点。现有的多目标TBD的方法[8-10]比出不久很快就成为多目标跟踪问题的研究热点,文献[12- 13]推导出PHD滤波器的两种实现形式,序贯蒙特卡罗(即粒子滤波)实现(sequence Monte Carlo-PHD,SMC-PHD)和高斯混合实现(Gaussian mixture-PHD,GM-PHD)。PHD滤波器相对于联合概率数据关联、多假设检验等传统多目标跟踪算法在跟踪多个数量变化的目标时,能有效地避免复杂的数据关联问题,在保证算法实时性的基础上提高跟踪精度。但是将PHD引入多目标TBD问题的研究还处于起步阶段,很多问题亟待解决。
文献[14]将SMC-PHD滤波器用于红外图像的多目标TBD问题中,引入多目标跟踪的思想,建立目标的运动模型和传感器观测模型,同时发挥PHD滤波器对目标数目的快速有效估计实现对目标跟踪与检测,取得良好的效果。2012年,文献[15]推导出更为合理的粒子权重表达式,文献[16]加入了目标数的估计,文献[17]将基于SMC-PHD的检测前跟踪算法应用在多机动目标场景,但由于均采用蒙特卡罗实现,计算复杂度大。
本文针对现有基于SMC-PHD的多目标TBD方法存在问题,用高斯粒子滤波器(Gaussian particle filter,GPF)[13]代替传统粒子滤波并提出一种基于高斯粒子PHD滤波(GPF-PHD)的检测前跟踪算法。高斯粒子滤波不仅能递归地解决非线性滤波问题,而且在预测和更新过程中只需要存储目标状态的均值和协方差进行迭代运算,特别适合处理大数据量的场景。文献[18]将高斯粒子滤波应用到单目标的检测前跟踪算法中并在工程中用现场可编程门阵列(field programmable gate array,FPGA)进行实现,说明了将高斯粒子滤波引入检测前跟踪算法具有很强的现实意义。PHD是一种针对未知目标个数时的多目标跟踪方法,将其改进算法GPF-PHD应用到红外弱小多目标的TBD可以解决未知数目的弱目标跟踪问题。仿真结果表明,所提算法在降低算法复杂度和提高目标跟踪精度方面都优于现有的方法,并具有实时检测的性能。较少,在低信噪比条件下的效果不是十分理想。
文献[11]提出了概率假设密度(probability hypothesis density,PHD)滤波[11]。PHD是多目标后验概率密度的一阶矩,可以递归地传递目标的状态信息。PHD滤波器在提
1 多目标状态模型和量测模型
1.1 目标状态模型
假设在k时刻有Nk个目标,其中每一个目标状态可以用一个5维向量表示,其中,)和分别表示目标的位置、速度和强度。当目标与观测站相距非常远时,目标的运动可认为是匀速直线运动,运动方程为

1.2 红外量测模型
本文主要考虑红外传感器系统,在一段时间间隔里对某一区域大小进行观测,且观测图像区域面积为n×m,其每一个分辨单元都对应一个矩形区域,且大小为Δx×Δy,因此对于图像单元(i,j),其对应的区域位置为(iΔx,jΔy),i=1,2,…,n,j=1,2,…,m。
在k时刻,观测模型就是在给定状态xk下在(i,j)处的强度,即


hk的点扩展函数形式为

式中,(px,k,py,k)为目标xpk的位置。
信噪比定义为

通常红外图像中信噪比在10 dB以下被看作为弱目标,目标中心区域大小在6×6以下为小目标。
2 GPF
GPF作为粒子滤波器(particle filter,PF)的一种推广,在算法实现过程中避免了粒子重采样,减少了采样的粒子数目,在预测和更新步骤只需迭代目标状态的均值和协方差,在保证跟踪性能的同时,可以减小计算的复杂度。GPF是采用高斯函数来近似目标状态的后验概率密度,应用于PHD的实现提高了多目标跟踪的运算速度[13]。
GPF基于PF方法只需计算高斯函数中的均值和协方差,就可以估计出目标状态的后验概率密度,在时刻k滤波后,其验概率密度函数可表示为

在预测与更新过程中不需要大量的采样粒子和重采样,只需迭代高斯密度函数的均值μk和协方差矩阵Pk,可先通过对重要性密度函数qopt(xk|z1∶k)进行一定数目的采样得到粒子,然后再计算每一个粒子的权值最后按式(7)计算均值和协方差。

式中,Np表示采样粒子的数目。
在GPF中,重要性密度函数qopt(xk|z1∶k)一般选择为先验预测概率p(xk|z1∶k-1),即有


3 基于GPF-PHD的TBD
虽然基于SMC-PHD的TBD可以在低信噪比下实现对多目标的检测和跟踪,但是粒子滤波使用计算复杂度高的K-means聚类来得到目标状态,而聚类方法会导致多目标状态估计不准确从而严重影响跟踪精度,这也在低信噪比条件下表现地尤为明显。其次,粒子滤波的重采样过程使算法复杂增加,并且导致粒子退化,发生采样枯竭现象,而解决该问题的方法之一是增加粒子数,但是庞大的计算量会使该算法在实际场景的目标检测和跟踪应用中受到很大的限制。本文采用基于GPF-PHD的TBD,可以较好地规避采用SMC-PHD所出现的问题,实现步骤如下文所示。
将PHD滤波用在红外图像多目标检测前跟踪中有一个前提条件,即红外图像中的每一个单元不能被多个目标影响,也就是说多个目标之间不能彼此靠近[15],即任意两个目标p,l∈[1,Nk],p≠l满足


3.1 状态预测
(2)存活目标:对于l=1,2,…,Jk-1,使用拟蒙特卡罗(quasi-Monte-Carlo,QMC)高斯粒子采样[14]:
参数估计

3.2 状态更新
更新后的采样粒子的权值为

式中

粒子集合P(i0,j0)表示为

更新后的高斯项的权值为

更新后的高斯项的均值为
更新后的高斯项的协方差为

3.3 修剪合并
高斯项分量随预测与更新不断增加,为了抑制其数目的增加,可设定一个权值门限Tprun,当高斯项的权重小于Tprun时将其剔除,该步骤称为修剪。另外,可再设定一个合并门限值U,当高斯项之间的距离小于U时将合并。
3.4 状态提取
目标数目Nk|k的估计为所有的高斯项权值之和,权值大于0.5高斯项的均值对应为目标的状态。其中目标数目Nk|k为

3 仿真结果与分析
本文将所提出的高斯粒子PHD的TBD算法(GPFPHD-TBD)和基于粒子滤波PHD的TBD算法(SMCPHD-TBD)进行仿真实验对比。采用最优子模型子模式分配距离[19](optimal subpattern assignment,OSPA)来评判跟踪算法在多个弱小目标的目标数目和目标状态估计的性能。
仿真场景:初始位置m(1)=[17,0,13,-0.13,20]T,m(2)=[4,0.2,4,0.2,20]T,m(3)=[3,0.2,17,0,20]T的3个目标在二维空间做匀速运动,目标的初始方差为P=diag([1,2,1,2,σ]2),整个检测与跟踪过程持续时间为60帧,采样时间周期Δ=1 s,像素分辨单元Δx=Δy=1,监视区域大小为20×20的序列图像,传感器模糊系数Σ=0.7,目标强度服从I∈U(18,22)的均匀分布。目标的存在概率为0.99,不考虑目标的衍生状态,修剪门限Tprun为10-5,合并门限U为4,OSPA参数为c=5,p=2。
目标的运动方程如式(1)所示。目标1在60帧一直存在于监视区域中;目标2在t=15 s时刻进入监视区域,在t=55 s时刻消失;目标3在t=10 s时刻进入监视区域,在t=40 s时刻消失。图1是信噪比为6 dB时分别在第2、23、38、55帧的一次红外量测图像。

图1 红外量测图像(SNR=6 dB)
在这两种算法实现过程中,新生目标的位置是未知的,需要在每一帧的观测图像中搜索新生目标。为了确保仿真条件一致,SMC-PHD-TBD算法每帧新生粒子数与GPFPHD-TBD算法相同为2 500。在3个不同的低信噪比(10 d B,8 d B,6 d B)条件下分别进100次蒙特卡罗仿真实验,实验结果如图2~图5所示。

图2 在SNR=10 dB条件下,两种算法的性能对比图
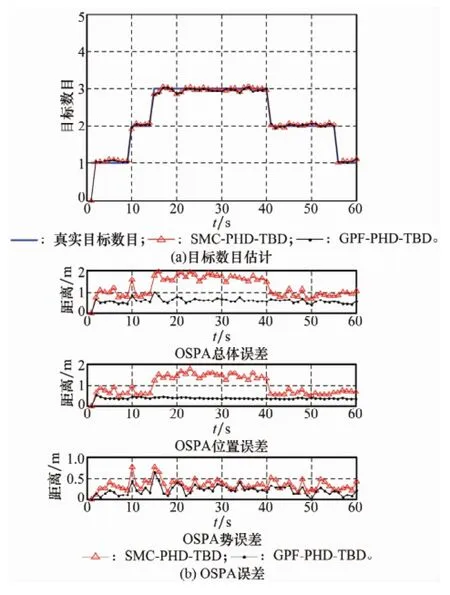
图3 在SNR=8 d B条件下,两种算法的性能对比图
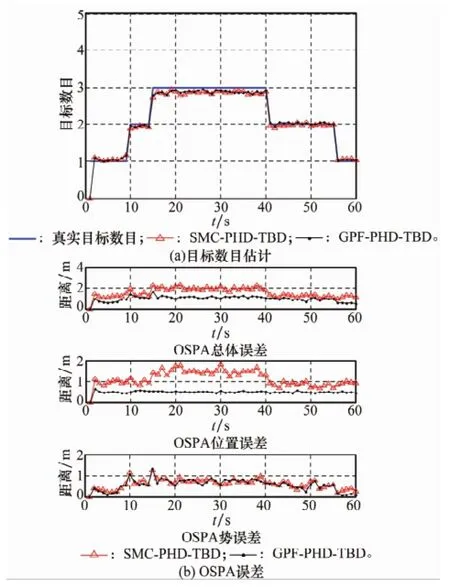
图4 在SNR=6 dB条件下,两种算法的性能对比图

图5 不同信噪比条件下,两种算法OSPA总体误差对比
结果分析:由图2~图4可以得出这两种检测与跟踪算法在红外背景下均可以实现对多个弱小目标目标数检测和实时跟踪,但是检测与跟踪的性能随着信噪比的下降而逐步降低。
对比两种多目标TBD算法,首先在目标数估计方面,从OSPA势误差对比图中可以得出,GPF-PHD-TBD的目标数估计性能没有比SMC-PHD-TBD有很大的提升。随着信噪比的降低,两种算法对目标数的估计能力均有所下降。
其次在跟踪精度方面,从OSPA位置误差对比图可以得出,在不同信噪比和目标个数变化的情况下,GPF-PHD-TBD的OSPA位置误差接近于零,说明该算法可以对目标位置进行精确估计,基本上可以做到准确地跟踪多个红外弱小目标。而SMC-PHD-TBD算法,随着目标数目增大以及信噪比的下降,OSPA位置误差会有不同程度的增加,主要原因是由于粒子滤波本身存在的缺陷,出现粒子退化现象,导致滤波精度大幅度下降,虽然重采样算法可以在一定程度上缓解粒子退化现象,但是同样会带来粒子耗尽(也称作采样枯竭),再经过K-means聚类提取,多目标位置的准确性不能保证。这种现象只能通过增加粒子个数进行克服,但是这种改进方式会严重增加算法复杂度,影响算法的实际应用。而高斯粒子滤波可以避免这些问题,同时可以大幅度地提高跟踪精度。
在总体跟踪性能方面,从图5可以看出,在信噪比为10 dB条件下,GPF-PHD-TBD算法的OSPA总体误差可以减小到SMC-PHD-TBD算法的33%。虽然改善效果随着信噪比的下降逐渐降低,但总体结果表明,在3种不同信噪比下,GPF-PHD-TBD算法的检测与跟踪性能都是明显优于SMC-PHD-TBD算法。随着信噪比的下降,势误差逐渐成为影响OSPA总体误差的主要原因,由于所改进的算法对目标数目估计性能的改善程度较小,因此总体性能改善程度逐渐下降。低信噪比环境下的多目标检测与跟踪需要更加注重对目标数目估计的准确性。
最后在算法复杂度方面,GPF-PHD-TBD由于使用的QMC采样,使得采样的粒子数目更加均匀,每个高斯项只需分配30个粒子就可以完成对目标的跟踪。在这3种场景下,虽然GPF-PHD-TBD需要的总粒子数随着信噪比的下降而增加,但是从表1的运算时间对比中可以看出,3种信噪比条件下,所提算法运行所耗时间约为SMC-PHD-TBD所耗时间的40%左右。由此可见,GPF-PHD-TBD的计算复杂度低于SMC-PHD-TBD。

表1 算法60帧运行时间比较s
仿真结果证明,GPF-PHD-TBD与传统的SMC-PHD-TBD相比,在降低计算复杂度的同时,无论是在目标数目检测还是在多目标跟踪精度方面都有了显著地提升。改进算法复杂度低,占用存储空间少,是一种能够在低信噪比环境下完成对多目标实时检测与精确跟踪的有效算法。
4 结 论
本文通过对红外背景下多个弱小目标TBD问题进行分析与研究,对现有的基于SMC-PHD-TBD算法进行了改进,用高斯粒子滤波代替传统的粒子滤波,提出了一种新的基于随机有限集的TBD,即GPF-PHD-TBD。本算法适用于目标个数未知、新生目标位置未知、低信噪比下的多个红外弱目标目标的检测。为了能将目标进行区分,要求两个目标之间不能相互影响。通过理论证明以及仿真实验,改进的算法能够实现对弱小目标的快速发现与精确跟踪,降低算法复杂度,有效改善现有SMC-PHD-TBD算法跟踪精度不高、存储量过大的缺陷,在信噪比为6 dB以上时,均可以获得理想的检测效果。本算法为基于随机有限集的TBD在实际工程中的应用提供了可能,是一种行之有效的多个红外弱小目标检测与跟踪算法。所做的工作是仿真环境下的弱小目标检测与跟踪,下一步的工作将进行实际图像的处理。
[1]Moyer L R,Spak J,Lamanna P.A multi-dimensional Hough transform-based track-before-detect technique for detecting weak targets in strong clutter backgrounds[J].IEEE Trans.on Aerospace and Electronic Systems,2011,47(4):3062- 3068.
[2]Deng X,Bi R,Liu H.Threshold setting of track-before-detect based on dynamic programming for radar target detection[C]∥Proc.of the IET International Radar Conference,2013:1- 4.
[3]Huang D,Xue A,Guo Y.A particle filter track-before-detect algorithm for multi-radar system[J].Electronics and Electrical Engineering,2013,19(5):3- 8.
[4]Zhao F,Lu H Z,Zhang Z Y.Infrared ship tracking based on improved multi-features fusion based mean-shift[J].Systems Engineering and Electronics,2014,36(2):205- 213.(赵菲,卢焕章,张志勇.基于改进多特征融合均值位移算法的红外舰船目标跟踪[J].系统工程与电子技术,2014,36(2):205- 213.)
[5]Liang X H,Pan Q,Yang F,et al.Particle filter track before detect algorithm based on two hierarchy sampling[J].Systems Engineering and Electronics,2011,33(9):1921- 1926.(梁新华,潘泉,杨峰,等.基于两级采样的粒子滤波检测前跟踪算法[J].系统工程与电子技术,2011,33(9):1921- 1926.)
[6]Chen B W,Wang W W,Qin Q Q.Infrared dim target detection based on Fuzzy-ART neural network[J].Systems Engineering and Electronics,2012,34(5):857- 863.(陈炳文,王文伟,秦前清.基于Fuzzy-ART神经网络的红外弱小目标检测[J].系统工程与电子技术,2012,34(5):857- 863.)
[7]Grossi E,Lops M,Venturino L.Track-before-detect with censored observations[C]∥Proc.of the International Conference on Acoustics,Speech,and Signal Processing(ICASSP),2012:3941- 3944.
[8]Zhan R,Zhang J.Improved multitarget track-before-detect for image measurements[C]∥Proc.of the 11th IEEE International Conference on Signal Processing(ICSP),2012:2183- 2187.
[9]Ouyang C,Hua Y,Gao S W.Improved adaptive target birth intensity for PHD filter[J].Systems Engineering and Electronics,2013,35(12):2452- 2458.(欧阳成,华云,高尚伟.改进的自适应新生目标强度PHD滤波[J].系统工程与电子技术,2013,35(12):2452- 2458.)
[10]Lehmann F,Sudparis T.Recursive Bayesian filtering for multitarget track-before-detect in passive radars[J].IEEE Trans.on Aerospace and Electronic Systems,2012,48(3):2458- 2480.
[11]Mahler R.Multitarget Bayes filtering via first-order multitarget moments[J].IEEE Trans.on Aerospace and Electronic Systems,2003,39(4):1125- 1178.
[12]Vo B N,Ma W K.Sequential Monte Carlo methods for multitarget filtering with random finite sets[J].IEEE Trans.on Aerospace and Electronic Systems,2005,41(4):1224- 1245.
[13]Vo B N,Ma W K.The Gaussian mixture probability hypothesis density filter[J].IEEE Trans.on Signal Processing,2006,54(11):4091- 4104.
[14]Punithakumar K,Kirubarajan T,Sinha A.A sequential Monte Carlo probability hypothesis density algorithm for multitarget track-before-detect[C]∥Proc.of the Signal Data Processing Small Target,2005,5913:1- 8.
[15]Lin Z P,Zhou Y Y,An W.Improved multitarget track-beforedetect using probability hypothesis density filter[J].Journal of Infrared and Millimeter Waves,2012,31(5):475- 480.(林再平,周一宇,安玮.改进的概率假设密度滤波多目标检测前跟踪算法[J].红外与毫米波学报,2012,31(5):475- 480.)
[16]Lin Z P,Zhou Y Y,An W.Track before detect algorithm based on cardinalized probability hypothesis density filter[J]. Journal of Infrared and Millimeter Waves,2013,32(5):437 -443.(林再平,周一宇,安玮.基于势概率假设密度滤波的检测前跟踪新算法[J].红外与毫米波学报,2013,32(5):437 -443.)
[17]Long Y L,Xu H,An Wei,et al.Track-before-detect for infrared maneuvering dim multitarget via MM-PHD[J].Chinese Journal of Aeronautics,2012,25(2):252- 261.
[18]Li Q,Ji H B,Guo H.Reaserch and hardware implementation of quasi-Monte-Carlo Gaussian particle filter[J].Journal of Electronics&Information Technology,2010,32(7):1737-1741.(李倩,姬红兵,郭辉.拟蒙特卡罗-高斯粒子滤波算法研究及其硬件实现[J].电子与信息学报.2010,32(7):1737 -1741.)
[19]Schuhmacher D,Vo B T,Vo,B N.A consistent metric for performance evaluation of multi-object filters[J].IEEE Trans. on Signal Processing,2008,56(8):3447- 3457.
Track-before-detect using Gaussian particle probability hypothesis density
LI Cui-yun1,CAO Xiao-nan1,LIAO Liang-xiong1,JIANG Zhou1,2
(1.School of Electronic Engineering,Xidian University,Xi’an 710071,China;2.Unit 95972 of the PLA,Jiuquan 735018,China)
In order to avoid the low tracking accuracy and high complexity problems in the conventional algorithms,a novel track-before-detect algorithm based on probability hypothesis density(PHD)filter is proposed for the tracking and detection of the multiple dim targets in the infrared image.With the Gaussian particle filter,the Gaussian components in PHD can be operated recursively and extracted as the states of targets.The algorithm can realize the tracking and detection of the multiple dim targets by the energy accumulation.With the theory of the random finite set,the algorithm performs the multiple dim targets tracking with unknown number.It can not only make use of the nonlinear estimation ability of the particle filter but also avoid the tracking inaccuracy which is brought by the fuzzy clustering.Simulation results with the infrared images show that the proposed algorithm has the low complexity and the better performance in the detection and tracking multiple dim targets than the conventional algorithm.
track-before-detect(TBD);probability hypothesis density(PHD);Gaussian particle filter(GPF);infrared image;multiple-target tracking
TN953
A
10.3969/j.issn.1001-506X.2015.04.03
李翠芸(1976-),女,副教授,博士,主要研究方向为数字图像处理、红外图像目标检测与跟踪、非线性滤波。E-mail:cyli@xidian.edu.cn
曹潇男(1989-),男,硕士,主要研究方向为红外图像目标检测与跟踪、数字图像处理、多目标检测与跟踪。E-mail:npu317@126.com
廖良雄(1988-),男,硕士研究生,主要研究方向为随机有限集滤波、弱小目标检测与跟踪方法研究。E-mail:liangxiong21@163.com
江 舟(1979-),男,硕士,主要研究方向为未知杂波下的多目标跟踪。E-mail:jiang937@126.com
1001-506X(2015)04-0740-06
2014- 04- 14;
2014- 11- 26;网络优先出版日期:2014- 12- 11。
网络优先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20141211.1811.003.html
国家自然科学基金(61301289,61372003);中央高校基本科研业务费专项资金(K5051202014)资助课题
