不确定抛物线型偏微分方程状态空间模型的保性能控制研究
2015-05-30赵磊
赵磊
摘 要:本文提出关于不确定线性空间分布过程的动态模型。该模型基于对空间分布过程的数学模型即抛物线型偏微分方程空间进行离散得到。首先,采用配置点谱方法对抛物线型偏微分方程空间进行离散,对瞬态项不做处理,这样就得到了不确定线性空间分布过程的动态模型;接下来,以上面开发的动态模型为基础采用线性矩阵不等式的方法设计保性能控制器;最后,用上面提出的建模和控制器的设计方法应用在催化反应棒的温度控制上,方法有效,控制效果明显。
关键词:保性能控制器;参数分布系统;线性矩阵不等式
1 引言
大部分用来对空间分布过程建模的抛物线型PDEs是不确定的。当前的研究已经取得了一些成果。
抛物线型偏微分方程组式的工业空间分布过程,如快速热过程、等离子体反应器、晶体生长过程等。大部分用来对空间分布过程建模的抛物线型偏微分方程系统是不确定的,产生此不确定性的原因有:建模简化、存在参数的漂移、系统周围环境的变化、缺乏对系统某组成部分或某种特性的。如果这些不确定参数在控制器设计过程中没有引起足够的重视,可能使系统的性能极大恶化,甚至导致系统失稳。
鉴于当前研究进展,本文将要解决抛物线型PDEs的保性能控制问题。本文保留非稳态项,只在空间上采用配置点谱方法。本文提出模型的方法和不确定性考虑方法至今未见发表。
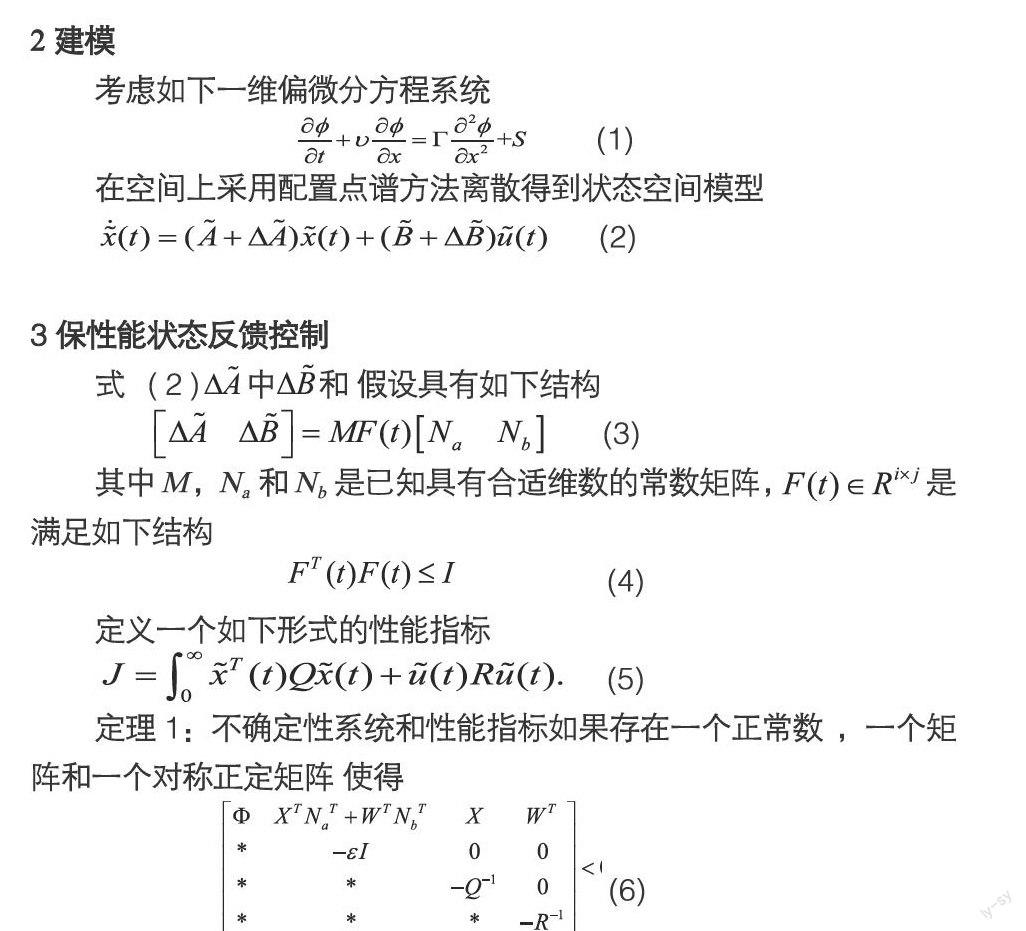
2 建模
3 保性能状态反馈控制
方程(6)是关于 ,W和X的线性矩阵不等式,该线性不等式的解构成一个凸集。因此,可以应用多种有效的最优化算法来判断该线性矩阵不等式是否有解。通过求解一个最优化问题,最优保性能控制器可以使闭环不确定系统的性能指标最小,下面给出该定理。
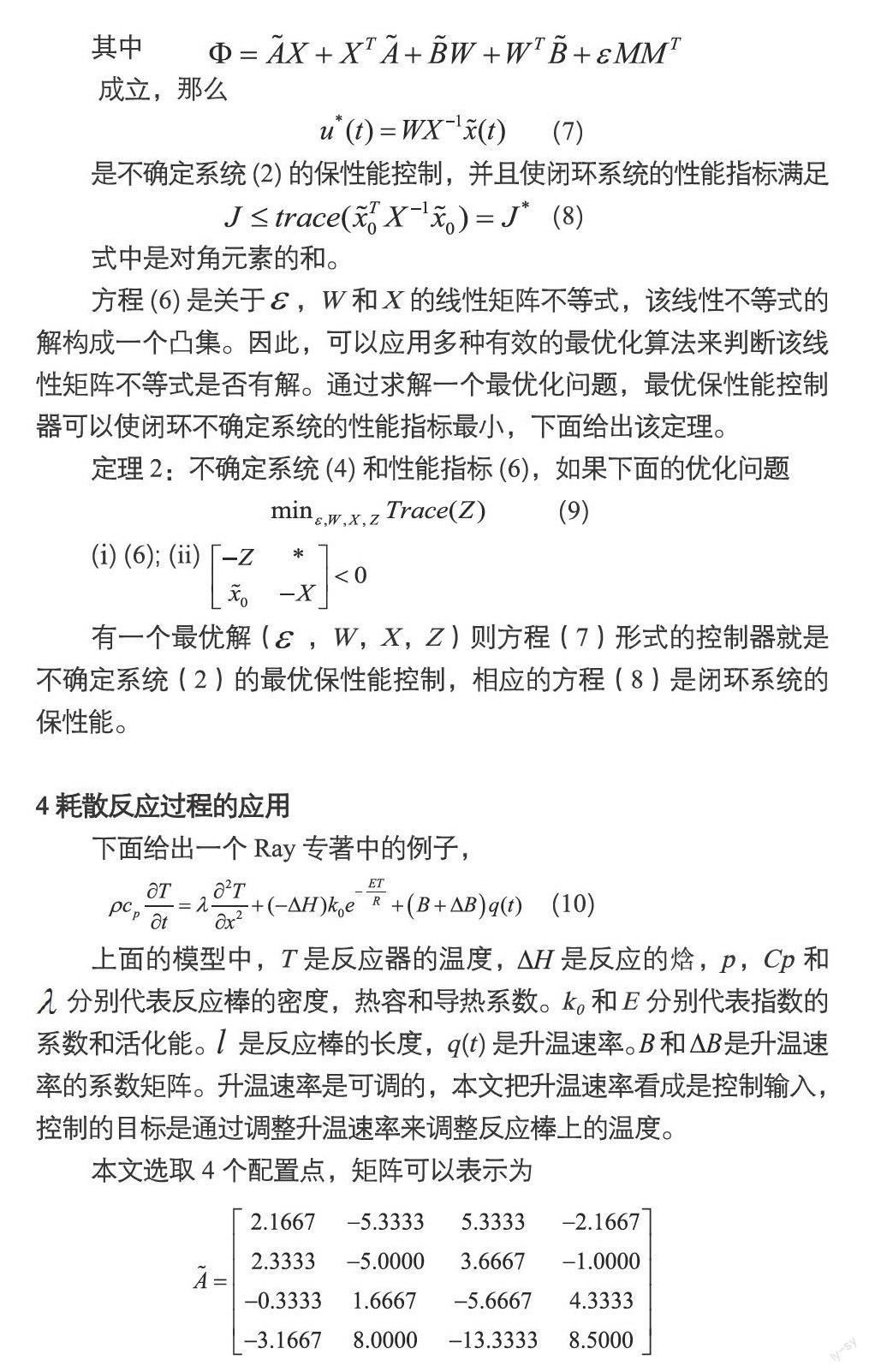
4 耗散反应过程的应用
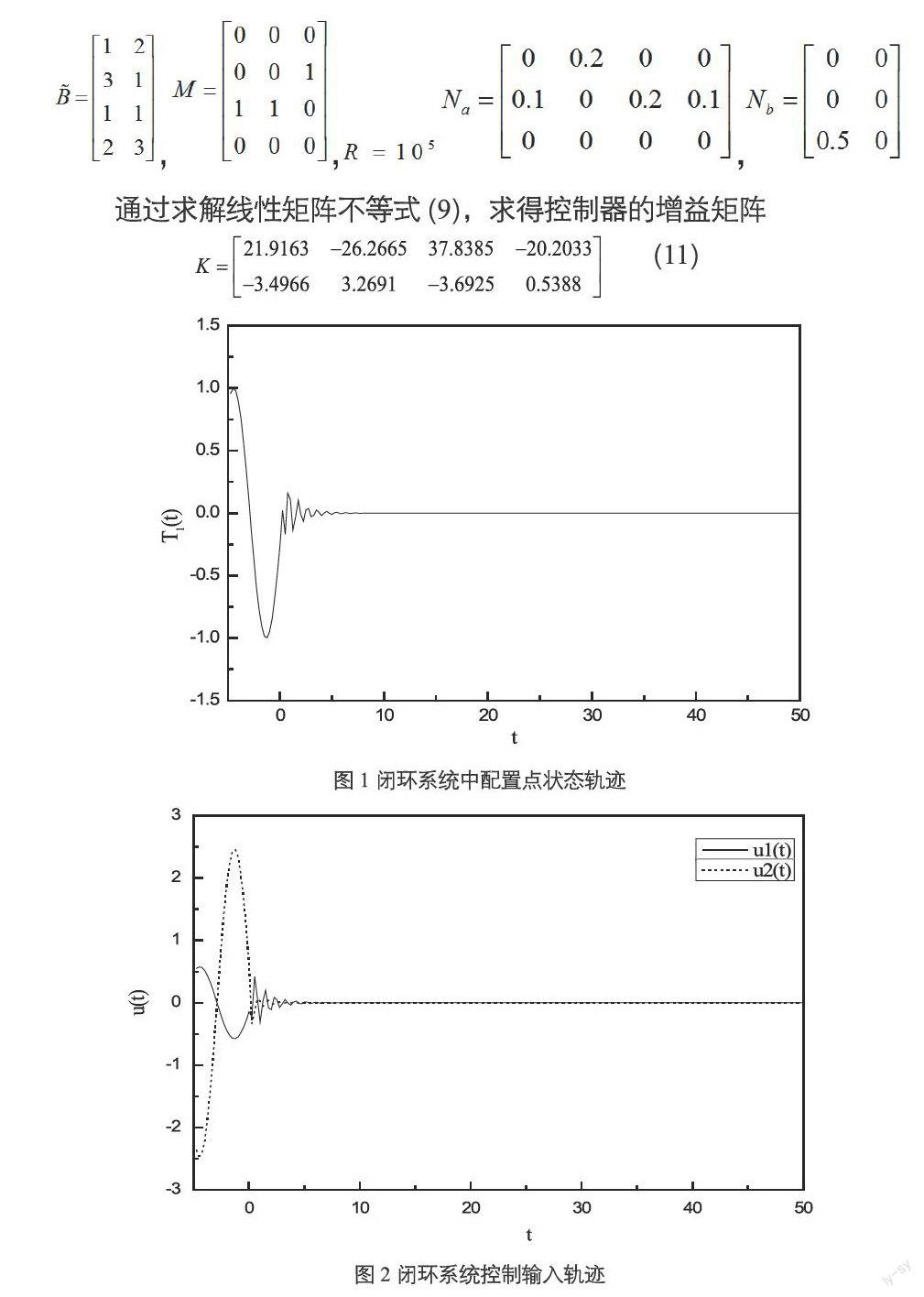
分别代表反应棒的密度,热容和导热系数。k0和E分别代表指数的系数和活化能。 是反应棒的长度,q(t)是升温速率。 和 是升温速率的系数矩阵。升温速率是可调的,本文把升温速率看成是控制输入,控制的目标是通过调整升温速率来调整反应棒上的温度。
对应的最优的性能指标的上界为 。图1分别显示出闭环系统在配置点时状态轨迹,图2显示出闭环系统控制输入的轨迹。模拟结果显示出保性能控制器能够把温度调整到稳态 。
5 结语
本文对于一类不确定的线性偏微分方程系统提出了一个控制模型。具体的方法是通过对偏微分方程采用配置点谱方法对空间部分进行离散,保留瞬态项。从而得到了用于保性能控制设计的状态空间表达式。接下来,采用Matlab线性矩阵不等式工具箱求解一个凸优化问题实现最优保性能控制的设计。最后,提出的方法成功的应用在催化棒的温度控制中,得到的模拟结果显示设计出的保性能控制器是有效的。
参考文献 :
[1] 王燕锋,沈英,王玉玲.具有时延和丢包的网络控制系统保性能控制[J].湖州师范学院学报.2015(02):23-28.
[2] 俞立,吴玉书,宋洪波.具有随机长时延的网络控制系统保性能控制[J].控制理论与应用.2010(08):985-990.
[3] 刘英英.时变时延离散网络控制系统的稳定性分析[J].沈阳大学學报: 自然科学版.2015(04):301-305.
[4] 郭彩霞,袁秋林,吴雪冰.一类多时滞状态网络控制系统的稳定性分析[J].测控技术.2015(03):71-74.
[5] 刘电霆,陈小雄.一类多时延网络控制系统的稳定性分析和鲁棒H_∞控制[J].桂林理工大学学报.2014(01):151-161.
[6] 赵立英,窦立亚,刘贺平.具有时变时滞的变采样周期网络控制系统的稳定性分析[J].北京科技大学学报.2014(08):1123-1127.
[7] 孙雁飞,王彦光,王健.新型网络控制系统在烧结控制改造中的应用[J].中国仪器仪表.2002(04):22-25.
[8] 黄四牛,陈宗基,魏晨.网络控制中传输延迟的接口延迟模型[J].北京航空航天大学学报.2004(05):414-418.
[9] 马永光,陈文颖,王兵树,等.有时延和丢包的网络控制系统的补偿策略[J].计算机工程与应用.2010(14):75-78.