轮边驱动电动车平顺性和操稳性分析与控制研究
2015-05-30夏国强许向国
夏国强 许向国


摘 要:为了解决能源危机,促进低碳节能的发展,在国际上很早就进行了对电动车的研究。但是因为很多技术的原因和成本的限制,电动车一直没能进行普及。本文对于轮边驱动车的平顺性和操稳性进行了深入的分析,探究怎么在这方面进行控制,加强电动车的普及和应用,促进电动车在我国的普及。
关键词:轮边驱动电动车;平顺性;操稳性
1 前言
轮边驱动电动车传动效率高,对于能源的利用效率高,但是整车非簧载质量的显著增大和轮毂电机存在的特殊转矩波动,会对车辆的平顺性与操稳性产生消极影响。所以,我们应该加强这一方面的探索,尽快的完善相应技术的革新。
2 当前轮边驱动电动车的研究进展
对于轮边驱动电动车的研究主要是因为在动力学上这一类型的电动车具有明显的优点,有可能成为未来世界交通工具的主流。基于这一可能,世界各国推进了对于轮边驱动电动车的研究,通用公司进行了雪佛兰混合动力皮卡车的研制、法国TM4设计制造了制动鼓动一体性的电动驱动系统、标志公司开发了4轮驱动的电动车,英国的贝姆勒公司开发了四轮电动轮驱动的电动车等。最具前沿价值的是法国的米其林公司开发的主动轮技术,把动力装置、悬架装置、制动装置、车轮本身构架成了一个整体,不需要传统动力就可以驱动汽车前进的智能化车轮,无论是理念、技术,还是传动的构思,都堪称典范。轮边驱动电动车示意图如下:
3 对于轮边驱动电动车平顺性和稳操性的研究
3.1 轮边驱动电动车平顺性和操稳性的研究进展
轮边驱动电动车的动力结构相比于其他传统电动车或者是驱动车来说,更为独特,虽然在传动和动力学上具有无可比拟的优势,但是同样也造成了非簧载质量的增大和电机的特殊转矩波动问题,在平稳性和操稳性方面无法与其他类型的传统车辆相比。所以我国的多所高校和企业在这一方面对于车辆着重进行了研究。同济大学使用频率域传递和均方根分析的方法,得出簧载质量的增大是汽车平顺性下降的一个主要原因。吉林大学研究得出,簧载质量的增加不仅使车辆的平顺性降低,同时轮胎的侧向力也因为动载荷均方根值的增大而降低,继而在稳操性方面也对电动车造成了影响。武汉理工大学对于上述两种结论进行了仿真验证,证实了两所大学的研究成果。
对于电机特殊转矩波动的问题,同济大学在整个轮边驱动电动车的研究领域都比较有建树,在这一方面通过对车辆传动路径和轮边驱动电动车车内噪声的分析与研究,得出车辆总成振动的主要原因就是电机转矩脉动形成了车轮轴向力矩波动。东北大学通过对电机径向力和切向力的分析,得出了激振力与初相角的關系。针对上述问题,我国学者进行了深入的分析与研究,对于电机的设置以及控制方面进行了深入的钻研,并取得了一定的成果。但是仍然不能彻底解决轮边驱动电动车平顺性和稳操性的问题。
3.2 轮边驱动电动车平顺性和操稳性的分析与控制
对于这一方面的研究主要分为四个方面,首先要分析非簧载质量对于车辆平顺性和操稳性的影响,对于如何降低系统的能量消耗和垂向振动负效应进行探讨;其次,分析电机垂向激励对车辆平顺性和稳操性的影响进行分析,根据FxLMS算法,对主动悬架控制进行分析,探讨如何对车辆垂向振动进行有效的控制;再次,从整体上对电动车的平顺性和操稳性进行分析,从整体上对于车辆操作的平顺性和操稳性进行分析与探讨,实现对于轮边驱动电动车的进一步控制。
3.2.1 非簧载质量
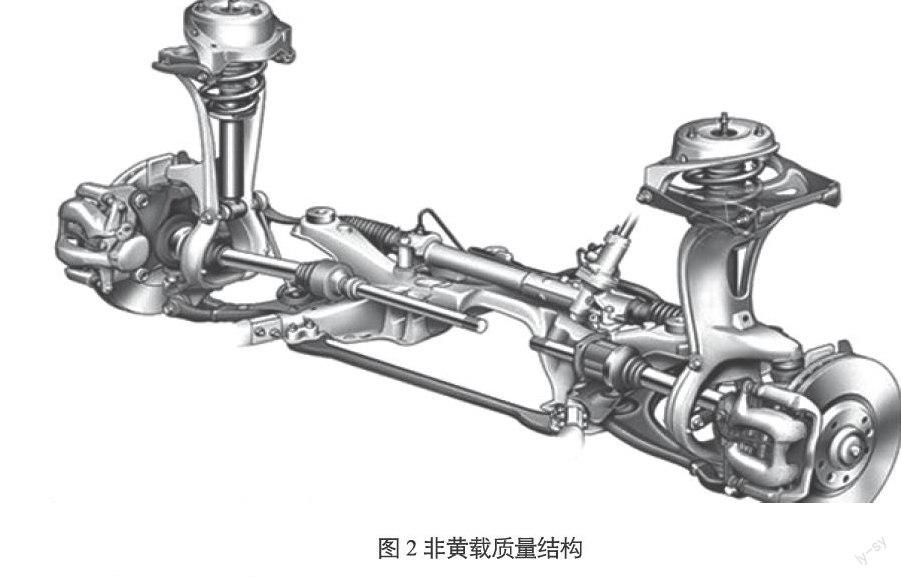
非黄载质量主要受到路面的影响,在凸包路面,电动车的垂向加速度、悬架行动程、车轮动载荷都有所增大,车轮的转弯性和横向稳定性下降,造成了车辆操稳性和安全性的下降,同时平顺性受到影响。但是当车辆以高速行驶过凸包路面时,平顺性有所改善,但是稳操性没有改善。在10Hz低频正弦路面的影响下,平顺性和稳操性也会下降。针对这一情况,我们可以采用主动被动联合减震控制的方法。根据车辆的设计,电机定子固连于轮轴,不会随车轮的转动而转动,可以把定子做成中空,安装减震的装置,轮毂电机的质量与吸振器的质量就进行了转换,降低了非簧载的整体质量,同时吸振器可以进行减震,减少了非簧载的负荷压力。这一装置与主动悬架天棚-地钩联合使用,可以降低整个频率内的1/4功率流,削弱了因非簧载质量的增加而造成的电动车平顺性和操稳性的下降。非簧载质量图如下:
3.2.2电机垂向激励
垂向激励主要对车身的加速度和车轮的动载荷影响较大,两者的波动加剧,就会引起车辆平顺性和稳操性的下降。当车辆的速度小于20m/h的时候,车辆的电机垂向性能指标会显著的增大,当车速在10kn/h时,车身加速和车轮动载和的增大幅度到达了97.6%和111%,对于整个电动车的平顺性和稳操性造成了极大的破坏。也就是说,在低速行驶的过程中,电机垂向激励对于车辆的平顺性和稳操性产生的破坏最大。
这一问题可以通过FxLMS算法的振动主动控制系统进行控制,对控制的信号进行推到,并对控制滤波器进行加权自适应。这一算法使系统不会因为正弦周期信号的激励频率发生显著的变化,对于电动车辆的稳操性和平顺性大大加强了。FxLMS算法如下:
y(n)=wT(n)x(n)
yk(n)=s(n)y(n)
e(n)=d(n)+yk(n)
X,(n)=x(n)*^s(n)
W(n+1)=w(n)-2 e(n)x,(n)
运行结构如下图:
从整体上来说电动车垂向运动、侧倾运动、俯仰运动的固有频率较低,影响车辆的平顺性和操稳性,这主要是因为电机的垂向激励频率与车辆固有频率的接近会导致车辆的共振,从而使平顺性降低。解决问题,可以在FxLMS算法的基础上,把车身悬架端点和天棚-地钩控制以及FxLMS控制相结合,控制主动悬架输出作用力,加强车身的平顺性和稳操性。
4 结语
在轮边驱动电动车的平顺性和稳操性方面,我国各高校以及企业都在进行研究,很快就能取得突破性的进展,这一研究结果也将对我国的传统车辆产生一定的冲击,但是,成本依然会成为车辆发展的主要限制因素。我们还不能放松,对轮边驱动电动车进行更加深入的研究。
参考文献:
[1] 熊璐,余卓平,姜炜,等.基于纵向力分配的轮边驱动电动汽车稳定性控制[J].同济大学学报: 自然科学版.2010(03):417-421.
[2] 余卓平,姜炜,张立军.四轮轮毂电机驱动电动汽车扭矩分配控制[J].同济大学学报: 自然科学版.2008(08):1115-1119.
[3] 褚文强,辜承林.电动车用轮毂电机研究现状与发展趋势[J].电机与控制应用.2007(04):1-5.
[4] 余卓平,左建令,陈慧.基于四轮轮边驱动电动车的路面附着系数估算方法[J].汽车工程.2007(02):141-145.
[5] 王玲珑,黄妙华.轮毂式电动汽车驱动系统发展综述[J].上海汽车.2007(01):3-6.
[6] 王玲珑,黄妙华.轮毂式电动汽车驱动系统发展综述[J].北京汽车.2007(01):35-38.
[7] 宁国宝.电动车轮边驱动系统的发展[J].上海汽车.2006(11):2-6.
[8] 余卓平,左建令,张立军.路面附着系数估算技术发展现状综述[J].汽车工程.2006(06):546-549.
[9] 葛英辉,倪光正.新型电动车电子差速控制策略研究[J].浙江大学学报: 工学版.2005(12):1973-1978.
[10] 靳立强,王庆年,岳巍强,等.基于四轮独立驱动电动汽车的动力学仿真模型[J].系统仿真学报.2005(12):3053-3055.
[11] 谭刚,陈韬,李军,等.电传动技术在工程机械中的应用[J].电子测试.2014(13):88-90.
[12] 贾勇.解析自卸车设计的基本原理[J].科技创新与应用.2014(16):105.
[13] 满敏,陈凌珊,何志生.电动汽车动力测试平台与整车模拟试验[J].上海工程技术大学学报.2014(01):30-34.
[14] 吴晓欢,宋珂,章桐.基于ADAMS/Insight的悬架优化设计[J].佳木斯大学学报: 自然科学版.2012(01):33-37.
[15] 姬鹏.基于虚拟样机的汽车操纵稳定性评价分析[J].机械工程与自动化.2009(04):8-10.
[16] 舒红宇,冯彧,張伟伟,等.基于虚拟样机技术的电动代步车平顺性研究[J].上海工程技术大学学报.2008(01):18-21.
[17] 李松焱,闵永军,王良模,等.轮胎动力学模型的建立与仿真分析[J].南京工程学院学报: 自然科学版.2009(03):34-38.
[18] 张义民,薛玉春,贺向东,等.基于开关磁阻电机驱动系统的电动汽车振动研究[J].汽车工程.2007(01):46-49.
[19] 靳立强,王庆年,宋传学.四轮独立驱动电动汽车动力学控制系统仿真[J].吉林大学学报: 工学版.2004(04):547-553.