自主式水下航行器试验平台的设计
2015-05-29张东昆侯建钊高菲
张东昆++侯建钊++高菲


摘 要: 为水下探测提供试验平台,设计了一台自主式水下航行器(AUV)。该航行器可被应用于海洋资源调查、港口安防、水产养殖、地貌观测等诸多方面。它可利用自身搭载的声呐、AHRS等传感器,实现水下自主航行、避障;并通过导航算法,实时地规划最优路径,完成水下地貌观测、资源探测。同时它也具备在水下未知环境,构建地图能力。
关键字: 水下航行器; 自主式; 水下试验平台; 地貌观测
中图分类号: TN911?34 文献标识码: A 文章编号: 1004?373X(2015)10?115?03
随着对资源的消耗量和需求量的与日俱增,人们开始加快对海洋的开发进程。自主式水下航行器(AUV)作为水下探测的工具引起了世界各国的重视。它具有水下机动性好、续航力强、安全可靠等优势,在海底地形地貌勘察、水文参数测量、深海资源调查、海洋救助与打捞等诸多领域有着巨大的应用价值[1?2]。
为配合海洋的相关开发,设计了一款自主式水下航行器(AUV)作为试验平台。介绍了水下航行器整体的系统结构设计,包括机械机构设计、硬件系统设计和软件系统设计。
1 自主式水下航行器机械结构设计
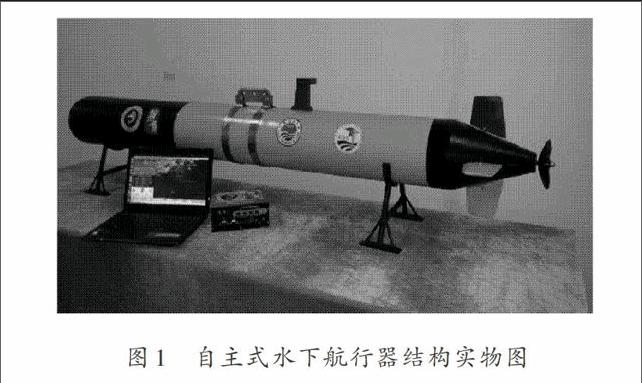
水下航行器在外形上仿照鱼雷的结构。整个的舱体设计采用流线型,减少它在水中运动时,水流对它产生的阻力[3];尾部采用圆锥体形,椎体的底部安装螺旋桨式推进器,为航行器提供动力,椎体的四个方向安装方向舵,控制它的运动方向,实现航行器的转弯,俯仰,航行器的结构实物见图1。航行器舱体上部安装无线天线,当航行器浮上水面时,可通过天线与岸基控制平台通信,进行数据交换或是接收新任务。
航行器的舱体使用铝合金材料,天线和方向舵使用的尼龙材料,表面用铝氧化硬化处理,增强抗腐蚀性。为保证航行器运行时的稳定性,对舱内部的负载进行了合理布局,使航行器的整体重心位于浮心正下方。用铅块对航行器进行配重,使其受力均匀、保持“零浮力”,也即在不受任何外力的情况下,航行器的重力大小等于浮力大小,航行器恰好能浮在水的表面。
图1 自主式水下航行器结构实物图
2 自主式水下航行器硬件系统设计
硬件系统关系到航行器工作时的安全性和稳定性,它主要由工控机、PC104、串口服务器、协议转换器、声呐等传感器、动力驱动和检测电路组成,如图2所示。
图2 水下航行器的硬件系统框图
2.1 工控机和PC104构成的运动决策系统
工控机和PC104是水下航行器的大脑,可控制传感系统进行数据采集,并接收传感系统传来的信息,对其进行解析,根据解析结果并结合自身使命发出决策指令。指令信息通过通信系统传达到执行系统,执行系统接收到指令后,将其转化成电机速度、转向以及舵机角度的变化。
2.2 动力驱动系统
采用瑞士Maxon公司的直流无刷电机作为推进器,其扭力大,噪音低[4]。驱动器选用的是美国的COPLEY驱动器,实物图见图3。其优势在于控制简单,稳定性高,通用性强,配合舵机的使用,可实现航行器在水下的前进后退、上前下浮、左转右转。动力驱动系统是航行器完成任务的基础,是整个平台硬件系统设计的关键。COPLEY驱动器采用数字增量式PID反馈,拥有电流、电压、速度三闭环控制,可以控制有刷、无刷等不同类型的电机,它支持RS 232串口和CAN总线协议,兼容性强。由于支持CAN总线,所以它支持多个驱动器同时使用。
图3 COPLEY驱动器实物图
2.3 协议转换器
协议转换器的作用是将PC104的串口协议转换成电机驱动器所需要的CAN总线协议,实现二者的通信[5],其实物图见图4。协议转换器上的MCU采用的是Microchip公司的dsPIC4011,它是一款集单片机和DSP综合功能的16位控制器,既保留了单片机的基本性能,又丰富了外围模块,还兼具了DSP的高速运算能力[6]。嵌入式内核选用的是μC/os Ⅱ,它由Micrium公司提供,源码开放,是一种可移植、可裁剪的、抢占式多任务实时内核。由于μC/os Ⅱ只对硬件的CPU和定时器进行了抽象,所以移植相对简单;它是基于任务的优先级高低进行任务切换的,适用于实时性要求比较高的场合。
图4 协议转换器
2.4 检测电路模块
检测电路模块包括舱体内部的温湿度检测,电池的电压、电流检测,漏水检测等,这些参数都关系到水下航行器的安全运行[7],其中泄露检测尤为重要。根据重力原理,如果舱内漏水,水会沿着舱内壁流到舱底,所以泄漏检测模块的两个探针放到舱的底部,正常情况下这两探针是断开的,一旦发生漏水,流到舱底的水会将两探针短路,此时检测模块就会检测到,通过CAN总线向上位机发出报警信息[8?9]。图5为漏水检测电路原理图。
图5 漏水检测电路原理图
2.5 传感系统
声呐、水下摄像头、惯性导航系统等构成了水下航行器的传感系统。在海底的未知环境中,AUV惟一可以依赖的是自身机载的惯导传感器和声呐。航行器搭载的声呐一般有两种:
(1) 一种是主动声呐,提供障碍物目标的距离和角度,可在二维空间上分辨目标的轮廓和位置;
(2) 另一种是侧扫声呐,用于海底地形地貌的勘测。
惯性导航系统为航行器提供位置、速度、航向和姿态角数据,它不依赖于任何外部信息,因此非常适合于水下航行器这种工作环境比较特殊的场合。它在工作时不向外部辐射任何电磁波,故隐蔽性好[10]。
3 自主式航行器软件系统的设计
自主式航行器的软件系统采用的是MOOS结构[11],它由Paul Newman博士提出,已有十多年的开发历史,如今已成功地应用于国外的多款水下航行器见图6。它是一种分布式控制体系结构,专门服务于水下航行器系统的完全开源的体系结构。其分布式体系结构特点是它的精髓所在:将每个子系统根据其功能都定义为一个独立的软件模块,如此一来,解决了同步问题,各个子模块共同构成一个完整、稳定、时效高的信息交互环境[12?13]。
传统的水下航行器软件系统具有效率低、实时性差、占用资源大的缺点,而MOOS体系结构的模块化设计、分布式、星型拓扑结构的特点很好地解决了这些问题,极大地提高了航行器软件系统的稳定性和实时性。
图6 水下航行器硬件系统效果图
4 结 语
本文介绍自主式水下航行器(AUV)试验平台的实现,包括其机械结构、硬件系统、软件系统等。多次测试,性能稳定、安全可靠,为海洋探测提供了完善的试验平台。
参考文献
[1] HE Bo, RAN Hong?ge, YANG Ke, et al. Path Planning and Tracking for Autonomous Underwater Vehicles [R]. [S.l.]: ICIA, 2009.
[2] STOKEY R P, VON ALT C, ALLEN B, et al. Development of the REMUS 600 Autonomous Underwater Vehicle [C]// Proceedings of 2005 MTS/IEEE Conference on Oceans. Washington, USA: IEEE, 2005, 2: 1301?1304.
[3] 吕瑞.超空泡航行体动力学建模与姿态机动鲁棒控制方法研究[D].哈尔滨:哈尔滨工业大学,2010.
[4] 马元.自主式水下航行器运动控制系统的设计[D].青岛:中国海洋大学,2014.
[5] 刘卫东.基于CAN总线的自主水下航行器内部通信与仿真[J].系统仿真学报,2007,19(6):1320?1322.
[6] Microchip Technology Inc.dsPIC30F系列参考手册[EB/OL].[2012?12?13]. http://wenku.baidu.com.
[7] 韩盈盈.自主式水下机器人的分布式运动控制系统算法与实现[D].青岛:中国海洋大学,2010.
[8] 童诗白,华成英.模拟电子技术基础[M].北京:高等教育出版社,2000.
[9] 马元,栾宁,管增辉.便携式水下机器人硬件系统设计[J].现代电子技术,2013,36(21):100?102.
[10] 宋超.基于ELM的AUV决策控制系统[D].青岛:中国海洋大学,2013.
[11] 温国曦.AUV组合导航算法研究及基于MOOS平台的系统实现[D].杭州:浙江大学,2013.
[12] 姜大鹏.多水下机器人协调控制技术研究[D].哈尔滨:哈尔滨工程大学,2011.
[13] 温秉权.小型浅水域水下自航行器系统设计与试验研究[D].天津:天津大学,2005.
