基于单轴气浮台的载荷运动特性测试的设计实现与分析
2015-05-28彭瑞谢任远
彭瑞 谢任远

【摘 要】为验证某卫星转动载荷的大角动量补偿功能是否满足实际使用需求,设计出基于单轴气浮转台,利用单轴气浮台测角装置和陀螺组合,对转动载荷在不同质量(转动惯量相同)、不同转动角速度的情况下的运动特性进行测量的地面试验系统,并以某一工况为例,得出载荷转动的时域与频域特性。试验结果为大角动量补偿功能的设计完善提供了依据,对卫星后续研制意义重大。
【关键词】单轴气浮台 频谱分析 运动特性 地面试验系统
1引言
随着卫星载荷的不断发展和卫星平台技术的日渐成熟,载荷对卫星平台的要求越来越高,两者的关系逐渐从载荷适用平台发展为载荷决定平台,由此给卫星平台的研制工作提出了更高的要求。为了降低研制风险, 需要通过各种类型的大量地面仿真试验对系统方案进行验证[1]。
某卫星载荷在卫星入轨后一直处于匀速转动状态,其转动产生的角动量由卫星姿轨控分系统进行长期补偿,因此探测头部旋转角速度的特性,直接影响卫星姿态稳定度指标。
本文根据某卫星载荷的运动特性,构建了一个基于单轴气浮台的对载荷在不同质量(转动惯量相同)、不同转动角速度的情况下的运动特性进行测量的地面试验系统,同时对测试出的转速进行频谱分析,得到载荷转动的时域与频域特性,为优化角动量补偿控制设计提供了依据。
2 频谱分析理论及在Matlab中的应用
控制系统的设计应该从分析性能要求开始,而频谱分析是性能分析的基础。另外,频谱分析也是设计和分析中常用到的一种数据处理手段。因此,设计者不仅应该知道频谱的概念,还应该掌握频谱的分析方法[2]。
2.1傅里叶级数
对于周期为T的周期函数f(t):
(1)
如果f(t)满足狄里赫利条件:在区间T上有界,且仅有有限个极大值和极小值,则f(t)可用收敛的傅立叶级数来表示。
三角函数形式的傅里叶级数为
(2)
上式的系数为
(3)
控制系统中使用复数形式的傅里叶级数
(4)
其中的系数 为
(5)
为复数,一般可表示为如下形式
(6)
从(5)式可知 和 为共轭复数,对于其中的每一组可以写成
(7)
式(7)表明,当用复数形式表示是,复系数 的幅值 表示了第k次谐波的幅值(幅值为2 ),而 的相角 则为该次谐波的相移。这种用复数形式来表示的谐波常称为复数正弦。
用傅里叶级数来表示函数f(t),无论是实数形式还是复数形式,都是将f(t)看成是由各次谐波所组成。傅里叶级数的系数表示了各次谐波的幅值和相位,这些系数的集合称为频谱。
2.2傅里叶积分和傅里叶变换
控制系统分析中,经常遇到非周期函数,这时傅里叶级数就不能应用了,但可以用傅里叶积分来处理[2]。
(8)
(9)
式(8)称为傅里叶积分,式(9)中的 称为函数f(t)的傅里叶变换。
设将 作为频率的横坐标,这时式(8)改写为:
(10)
对于(8)式,按照积分的概念可得:
(11)
或者可以写为:
(12)
傅里叶积分将一个非周期函数f(t)分解为各次谐波,每一个谐波的幅值由(8)式可知为:
(13)
这幅值为无穷小,所以一般用相对幅值 来表示其频谱。这就是说,傅立叶变换 表示的是该非周期信号谐波的分布特性,故 称为信号的频谱特性,简称为频谱。
傅里叶变换使得我们可以从频谱的角度来分析信号。
2.3频谱分析在MATLAB中的应用
离散傅里叶变换是进行频谱分析的基本工具,在实际中得到广泛应用的是快速傅里叶变换(FFT算法)。现在FFT已可以用MATLAB软件中的fft函数来进行计算,这个函数做的是下面的变换
(14)
式(14)中 ,N是x的点数(即数据长度)。
实际使用中需要注意FFT算法与其它函数一起运用。本文中频谱分析的函数算法如下:
function[AW,f]=cftbyfft(wt,t,flag)
if nargin==2; flag=1; end
N=length(t);
T=t(length(t)-t(1));
dt=T/N;
W0=fft(wt);
W=dt*W0;
df=1/T;
n=0:1:(N-1);
if flag==0
n=-N/2:(N/2-1);
W=fftshift(W);
end
f=n*df;
AW=abs(W);
if nargout==0
plot(f,AW);grid,xlabel('频率f(Hz)');ylabel('幅值|W(f)|')
end
3试验系统设计
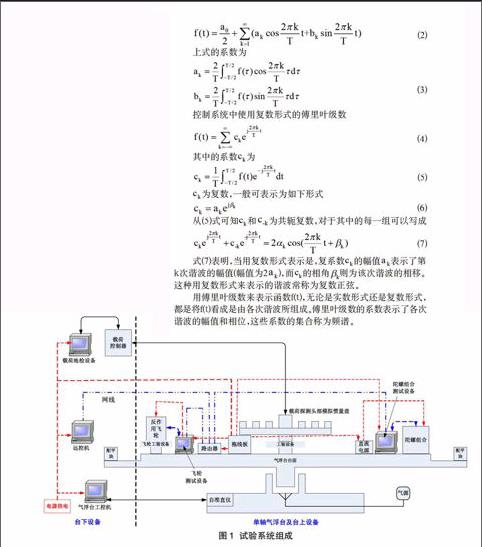
气浮台依靠气源提供的压缩空气在气浮轴承与轴承座之间形成气膜, 从而使气浮台的转台浮起, 实现近似无摩擦的相对运动条件,以模拟卫星载荷在外层空间所受干扰力矩很小的力学环境[2]。某卫星载荷在卫星入轨后一直处于匀速转动状态,为测试其运动特性,设计的试验系统组成如图1所示。本试验中气浮台为单轴精密气浮台;反作用飞轮用于标定图1所示的气浮台总的转动惯量;陀螺组合用于测量载荷转动时气浮台的相对转动角速度;载荷探测头部模拟惯量盘用于模拟载荷探测头部的转动(质量可调、转动惯量相同),由载荷伺服控制器控制其转动角速度。
图1试验系统组成
图1中,载荷探测头部模拟惯量盘、动量轮通过工装设备固连于单轴气浮台上,陀螺组合、反作用飞轮地面试验设备、陀螺组合地面试验设备直接放置在气浮台上;载荷伺服控制器、载荷地检设备放置于台下。载荷伺服控制器通过载荷地检设备进行供电、控制与相关通讯;反作用飞轮、陀螺组合分别通过专用测试设备进行供电、控制与相关通讯;单轴气浮台通过配平块进行配平,通过自准直仪进行测角与测角速度;远控机通过网络控制飞轮和陀螺的地面软件,用以发送指令和存储数据。载荷的台上台下连接电缆加工材料采用柔性较好软线或散线,通过吊装设备从气浮台中心上方垂下,以减小电缆产生的扭矩对试验的影响。
4试验数据分析和处理方法
4.1气浮台整体转动惯量J0的计算
已知反作用飞轮的转动惯量是J1=0.0465kgm?,转速为ω1为飞轮转速;台体转动惯量设为J0,转速ω0为气浮台自准仪的测量值;根据动量守恒公式J0*ω0=J1*ω1,可计算出气浮台体的转动惯量J0=(J1*ω1)/ω0。
试验中共进行了4组测试,分别根据反作用飞轮0rpm->1000rpm、1000rpm->0rpm、0rpm->-1000rpm和-1000rpm->0rpm四种工况下的气浮台转速数据(△ω01、△ω02,△ω03,△ω04),算出台体的转动惯量(J01、J02,J03,J04),取平均值作为气浮台体的转动惯量。
4.2载荷转速波动量的计算
载荷探测头部转动惯量J2取理论值19 kgm?,转速设为ω2;台体转动惯量为J0(4.1中计算值),转速ω0为气浮台自准仪测量值;根据动量守恒公式J0*ω0=J2*ω2,可计算出ω2=(J0*ω0)/J2。
试验中分别在模拟惯量盘质量60kg和90kg条件下,进行了转动角速度108°/s、120°/s、150°/s共六种工况的测试;根据气浮台转速数据(陀螺数据和自准仪数据),计算并画出每一种工况下三个转动角速度波动量(载荷自身采集,陀螺数据换算和自准仪数据换算)的数值对比曲线,得出每种工况下的载荷探测头部转动角速度波动量范围。
为更好的反映运动特性,分别对不同工况下的陀螺转速、载荷转速、气浮台转速利用FFT进行频谱分析,从频率角度进一步分析其运动特性。
5试验结果分析
试验共进行了六种工况的测试,现取其中一种工况(质量60kg、转速120°/s)进行试验结果分析。在此种工况下,经测试标定,气浮台整体平均惯量为2951.045 kgm2,载荷探测头部与气浮台的惯量比为142。
此种工况下的转速波动量测试结果对比曲线如图2所示。
图2转速波动量测试结果对比图
陀螺转速、气浮台转速、载荷转速的时域与频域分析曲线对比如图3所示。
图3转速频域分析结果对比
通过测试曲线对比分析,可以得出试验结果为:
(1)气浮台采集数据、陀螺采集数据与载荷采集数据基本一致,载荷探测头部稳态运行时的转速波动量基本在±0.2°/s范围内;
(2)气浮台、陀螺与载荷数据频谱分析一致。基频为0.33 Hz,有多倍频,且基频分量均远大于倍频分量。
6结语
本文设计出了基于单轴气浮台的某卫星载荷运动特性测试的地面试验系统,并提出了试验数据分析和处理方法。
通过对某一工况的测试结果分析,获得了载荷时域和频域的转动特性,根据测试和分析结果进一步完善角动量补偿控制的设计,对载荷的优化设计提出进一步要求。本次试验对后续研制工作意义重大。
参考文献:
[1]李季苏,牟小刚,张锦江.卫星控制系统全物理仿真[J].控制工程,2003(1):20- 26.
[2]王广雄,何朕著.控制系统设计.清华大学出版社,2008.3.
[3]刘飞,董云峰.基于单轴气浮台的空间跟瞄地面试验的设计与实现.计算机测量与控制,2010,18(3):626-628.
