时滞正系统静态输出反馈稳定的可解性
2015-05-25黄丽琼
黄丽琼
(商洛学院数学与计算机应用学院,陕西商洛 726000)
时滞正系统静态输出反馈稳定的可解性
黄丽琼
(商洛学院数学与计算机应用学院,陕西商洛 726000)
讨论了离散时间时滞正系统的稳定性问题,首先给出一个充要条件,设计一个静态输出反馈控制器使得闭环系统是正的而且是渐进稳定的,这个充要条件可以通过线性规划(LP)的形式解出来,这种方法在单输入单输出系统中是完全可解的;其次,讨论了系统的时滞项如果是非线性时系统静态输出反馈稳定的可解性并给出充分条件.
正系统,时滞系统,稳定性,静态输出反馈.
正系统是指系统从一个非负初始状态出发,系统的状态都保持在一个正象限中,正系统经常在一些要求状态变量为正的模型中出现,例如:生态系统,医药科学系统,人口系统[1-6]等.文献[7,8]中讨论了正系统的稳定性问题,文献[9-12]讨论了单输入单输出正系统的状态反馈稳定性问题,文献[13]中给出了一般情况下对于部分单输入单输出系统静态输出反馈稳定性问题不能完全的解决,文献[14]中讨论了只有当增益矩阵K有界时,静态输出反馈问题才可解,文献[15]中给出了运用数值迭代程序方法解决静态输出反馈问题,但是在某些不能穷举数值的系统中这种方法并不适用,因为不能保证收敛到一个数值解.文献[16]中讨论了连续时间正系统静态输出反馈问题的可解性,现主要讨论离散时滞正系统的静态输出反馈问题的可解性,所给出的方法完全解决了静态输出反馈稳定性问题.
1 预备知识
主要给出后面结果中需要用到的一些定义和引理,用到的记号基本都是标准的.具体地n维实向量空间维非负(正)实矩阵的集合复数集;N:非负整数集;A≥0(A>0):矩阵A是非负(正)的, 即A的每一个元素都是非负(正)的.
考虑下面离散时间时滞系统

定义1如果对每一个可容许初始状态x(0)≥0,系统(1)的状态轨迹都是非负的,即x(k)≥0,(k∈N),则称系统(1)是正系统.
引理1[7]线性时滞系统(1)是非负的,当且仅当A∈Rn×n是非负的,Ad∈Rn×n是非负的.
引理2[8]如果系统(1)是正的,那么下面的条件是等价的:

i)对于每一个初始条件,系统(1)是渐进稳定的.
iii)存在一个使得(A+Ad-I)λ<0.
引理3[16]矩阵A-,A+为给定的方阵,在区间A-≤A≤A+上的所有矩阵是非负的且是稳定的当且仅当A-是非负的,A+是稳定的.
2 主要结果
2.1 单输出情况
考虑下面系统

其中A∈Rn×n,B∈Rn×p,C∈R1×n是适当维数的不变矩阵.
寻找一个具有形式u(k)=ly(k),l∈Rn×1的静态输出反馈,使得闭环系统是正的且是渐近稳定的.
定理1假设矩阵C≥0,那么存在一个静态输出反馈u(k)=ly(k)使得闭环系统是正的且是渐进稳定的,当且仅当存在两个向量λ∈Rn,z∈Rp使得下式成立

证明充分性:假设条件(3)成立,得到λ>0,又因为C≥0,则λC≥0,把l的参数形式代入条件(3)中,条件(3)等价于下式

由引理1和引理2得出在静态输出反馈控制u(k)=ly(k)下闭环系统是正的且是稳定的.
必要性:假设存在u(k)=ly(k)使得闭环系统是稳定的且是正的,那么根据引理1可得到A+BlC是非负的,又因为A+Ad+BlC是稳定的,根据引理2存在一个λ使得下式成立

通过变换变量使得z=Cλl,代入式(4)则得到

定理2假设矩阵A≥≥0,Ad≥≥0,那么存在一个静态输出反馈u(k)=ly(k)使得闭环系统是正的且是渐进稳定的,当且仅当存在两个向量λ∈Rn,z∈Rp使得下面的LP问题至少有一个是成立的.

证明如果矩阵A+Ad是稳定的,结果显而易见,因此假设矩阵A+Ad不是稳定的,首先如果存在一个l使得A+Ad+BlC是稳定的且是非负的,则存在一个λ使得(A+Ad+BlC-I)λ<0,当C=0时,(A+Ad-I)λ<0得出A+Ad是稳定的,与假设矛盾,因此C≠0.接下来的证明与定理1相似.
定理3如果存在一个非负静态输出反馈控制u(k)=ly(k)≥0使得闭环系统是正的且是稳定的,当且仅当下面的LP问题至少有一个是成立的.
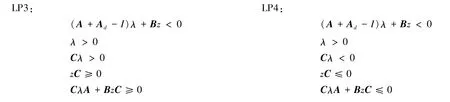
证明:控制率u(k)=ly(k)是非负的当且仅当lC≥0,变换变量使得z=lCλ,则当C>0时,即要求Cλ>0,zC≥0,当C<0时,即要求Cλ<0,zC≤0,其余证明与定理1相似.
2.2 鲁棒稳定
考虑区间正离散时滞系统

定理4如果存在一个静态输出反馈率控制u(k)=ly(k),对于任意的使得闭环系统是正的且是渐进稳定的,当且仅当存在两个向量λ∈Rn,z∈Rp使得下式成立

证明运用引理3的结果,证明方法和定理1相似.
注:如果存在一个非负静态输出反馈控制u(k)=ly(k)≥0使得闭环系统是正的且是稳定的,通过给LP5加上一个zC≥0或者给LP6加上zC≤0.
2.3 单输出情况
A+BlC是非负的且是稳定的当且仅当它的转换矩阵是非负的且是稳定的,所以上述方法也适用于静态输入系统,静态输入稳定的充要条件即是静态输出稳定的充要条件的对偶条件,因此通过计算,存在一个单输入静态输出反馈率u(k)=ly(k)使得闭环系统是正的且是渐进稳定的当且仅当下列的LP问题中至少有一个是成立的.

2.4 考虑非线性时滞动态系统

引理4 非线性时滞动态系统(5),A∈R+,fd:R→R是非负的且如果存在一个λ>0,使得(A+γIn-In)λ<0,则系统(5)是渐进稳定的.
证明:选取Lyapunov函数所以V(x(k))≥0,

考虑非线性时滞动态系统

定理4假设矩阵是非负的且使得下面LP问题至少由一个是成立的如果存在两个向量λ∈Rn,z∈Rp

注:在非线性时滞系统中,同样可以考虑系统的非负稳定控制问题,通过给LP9加上一个zC≥0或者给LP10加上zC≤0.
3 结 论
主要讨论了运用一个静态输出反馈控制率,使得正系统的闭环系统是正的且是稳定的,并给出了一个充要条件,这个充要条件可以通过线性程序(LP)的形式解出来,其次,讨论了系统的时滞项如果是非线性时系统静态输出反馈稳定的可解性并给出充分条件.
参考文献:
[1]ANDERSON D H.Compartmental Modeling and Tracer Kinetics[M].Berlin:Springer,1983
[2]BELLMAN R.Introduction to Matrix Analysis[M].New York:McGraw-Hill,1970
[3]BERMAN A,Plemmons R J.Nonnegative Matrices in the Mathematical Sciences[M].New York:Academic Press,1979
[4]BERNSTEIN D S,HYLAND D C.Compartmental Modeling and Second-moment Analysis of State Space Systems[J].SIAM J Matrix Anal,1993,14(4):880-901
[5]CAMPBELL S A,BELIR J.Multiple-delayed Diqerential Equations as Models for Biological Control Systems[C].Proceedings of the World Mathematical Conference,1993,3110-3117
[6]GODFREY K.Compartmental Models and Their Applications,Academic Press[M].New York:1983
[7]HADDAD M,CHELLABOINA V S.Stability Theory for Nonnegative and Compartmental Dynamical Systems with Time Delay[C].American Control Conference,2004
[8]BUSLOWICZ M.Simple Stability Condition for Positive Discrite-time Systems with Delay[J].Bull Pol Ac Tech,2008,3(2):325-328
[9]FARINA L,RINALDI S.Theory and Applications[M].New York:Wiley,2000
[10]KACZOREK T.Positive 1D and 2D Systems[M].Springer-Verlag:2002
[11]LUENBERGER D G.Introduction to Dynamic Systems[M].New York:Wiley,1979
[12]JACQUEZ J A.Compartmental Analysis in Biology and Medicine[M].New York:University of Michigan Press Ann Arbor MI,1985
[13]MUSTAFA D.Optimal Scalar Static Output Feedback[J].Systems and Control,1996,27(1):9-19
[14]VINCENT B,JOHN N.NP-hardness of Some Linear Control Design Problems[J].Journal SIAM Journal on Control and Optimization,1997,35(6):2118-2127
[15]GHAOUI L E,STRY F,AIT R M.A Cone Complementarity Linearization Algorithm for Static Output-feedback and Related Problems[J].IEEE Transactions Automatic Control,1996,18(10):1171-1176
[16]RAMI M A.Solvability of Static Output-feedback Stabilization for LIM Positive systems[J].Systems and Control,2011 60(1):704-708
Solvability of Static Output-feedback Stabilization for Discrete-time Positive Systems with Time-delay
HUANG Li-qiong
(College of Mathematics and Computer Application,Shangluo University,Shangluo,726000 China)
This paper discusses stabilization of discrete-time positive system with delay.Firstly,necessary and sufficient condition is given by linear programming and a static output-feedback controller to make the closed-loop system positive and asymptotic stable,which is completely solvable in single-input and single-output positive system.Secondly,this paper researches solvability of static output-feedback stabilization for the system and gives necessary and sufficient conditions.
positive,system with delay,stability,static output-feedback.
O231
A
1672-058X(2015)03-0016-05
10.16055/j.issn.1672-058X.2015.0003.004
2014-08-20;
2014-10-13.
黄丽琼(1987-),女,陕西商洛人,硕士,助教,从事控制理论研究.
