极紫外相机电控单元检测系统的设计与实现
2015-05-10王永成
王永成
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
1 引 言
中国探月工程二期嫦娥三号月球探测器上安装的月基极紫外相机对于地球大气和空间天气研究具有非常重要的意义,它主要负责对地球周围等离子体层产生的30.4nm辐射进行全范围、长期的观测研究[1-2]。
极紫外相机需要监测地球等离子体层的空间分布及其变化并对地球等离子体层的整个轮廓成像。为了实现此目标相机设计了较大的视场和较高的角分辨率;为了实现对地球的对准和跟踪功能,极紫外相机设计了俯仰和方位转动机构;嫦娥三号月球探测器着陆后会产生大量的月尘,故设计了镜头盖机构以避免月尘对相机的光学系统造成污染,镜头盖机构采用双绕阻步进电机进行驱动[3-4]。
月球的空间环境具有高温差、强辐射的特点,探测器着陆时还会受到较大的冲击[5-6],加之探测器总体对载荷重量和功耗的严格限制使得月基极紫外相机的设计难度大大提升;极紫外相机的电子学系统设计除了考虑常规的功能和性能之外还需要在抗辐照设计、抗单粒子事件、EMC和轻量化低功耗高可靠等方面进行设计。考虑到极紫外相机电子学单元功能的复杂性和特殊性以及航天工程对设备的各项功能和性能测试的严格要求,开发一套适合极紫外相机电控单元测试和检测的系统对于保证工程质量和进度至关重要。本文结合极紫外相机电控单元检测系统的研制过程,详细阐述其结构框架及工作原理、系统的实现和在工程中的验证结果。
2 电控单元构成及工作原理
有效载荷分系统为了实现轻量化和低功耗的设计目标,将各载荷的公用单元进行了集成化设计,通过公用单元实现对各载荷电子学单元的供电及控制功能,各载荷电子学单元根据公用单元的综合调度实现对各自载荷的通讯和控制功能。有效载荷公用单元和各载荷的电子学单元集成后安装在载荷电控箱中,该设计较以往的各载荷单独使用供电和控制的设计相比重量减轻了70%,功耗降低了50%。
极紫外相机电控单元的原理框图如图1所示,除了开关机控制电路、主备切换控制电路、俯仰电机和方位电机驱动电路之外的其余电路都采用了冷备份设计,电控单元和有效载荷公用单元的CPU接口之间采用交叉备份的设计。电控单元以FPGA为核心,根据有效载荷公用单元的调度完成对极紫外相机的控制和综合管理功能,接收并执行有效载荷公用单元发送的扩展指令使其开机/关机或者处于主份/备份状态;极紫外相机的电源由有效载荷公用单元提供再经电控单元二次稳压后为其它电路供电,电控单元将采集到的7路模拟量遥测信号和6路开关量遥测信号提供给有效载荷公用单元,由其处理后通过1553B通道下行,用户可以通过这些遥测量判断极紫外相机的工作状态是否正常。极紫外相机电控单元通过RS-422接口与成像单元进行通讯,波特率为62.5kbps;电控单元通过LVDS接口接收成像单元发送的科学数据,LVDS接口采用三线制接口标准其接口数据时序图如图2所示,包括帧同步信号、时钟信号和数据信号,时钟DT_CLK的频率为5MHz,帧同步DT_EN为低电平有效,与时钟DT_CLK的下降沿同步,数据DT_DATA与时钟DT_CLK的下降沿同步,数据宽度为36位,由3个12位的数据构成,每个数据的传输顺序为高位在前、低位在后。

图1 电控单元原理框图Fig.1 Schematic diagram of control unit
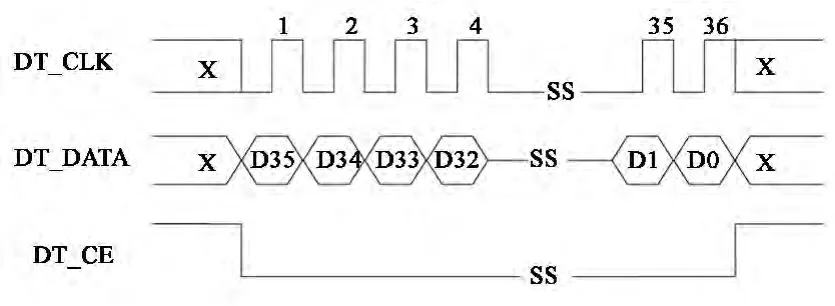
图2 LVDS接口时序图Fig.2 Sequence diagram of LVDS
FPGA作为电控单元的核心,主要完成与有效载荷公用单元CPU之间的信息交互功能,内部各功能单元的地址分配及译码功能,镜头盖电机、俯仰电机和方位电机的控制功能,6路霍尔传感器的状态采集及相关控制功能,与成像单元之间的RS-422通讯和数传功能,图像数据的缓存及图像坐标的计算功能,为CPU产生中断状态寄存器及外部中断功能,产生表征FPGA工作状态的心跳信号功能。
3 检测系统的设计与实现
月基极紫外相机所使用的探测器为楔条形阳极光子计数探测器,该探测器由微通道板和楔条形阳极构成,由于微通道板只有在高电压、高真空条件下才能激发出二次电子,然后由楔条形阳极负责收集电荷,最后由成像单元将电荷信号经过电荷灵敏前置放大、整形放大、峰值保持以及后续的A/D转换后作为科学数据传送给电控单元。国内相关单位对于楔条形阳极光子计数探测器进行了深入的研究,王晓东等人对EUV成像仪极间串扰和伪信号触发技术修正进行了研究[7],尼启良等人对使用位敏阳极的极紫外单光子计数成像系统进行了研究[8],何玲平等人对楔条形阳极光子计数探测器成像性能的检测技术进行了研究[9]。图3为极紫外相机成像实验的环境示意图,极紫外相机置于真空室中与真空室外的平行光管连接,光源产生的光线经过光学系统反射后进入极紫外相机,极紫外相机对置于微通道板1mm位置处的分辨率板进行成像。极紫外相机通过穿舱电缆与载荷电控箱中的极紫外相机电控单元连接,极紫外相机工作时,其产生的科学数据通过LVDS数传总线传递给电控单元。从上述的论述可知,利用实际的系统对月基极紫外相机电控单元进行测试需要专门的高真空环境,而且在这种环境下无法进行一些异常用例的测试。为了实现对月基极紫外相机电控单元的各项功能和性能的综合检测,首先需要模拟电控单元的各个外部接口的功能,使其构成一个完整的系统,然后对其进行检测;其次检测系统需要具备智能判断并分析电控单元各参数及工作状态的功能。
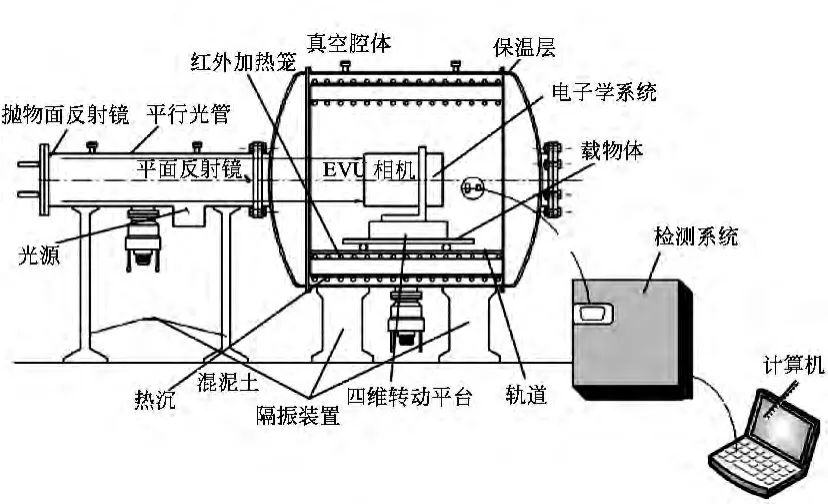
图3 实验环境示意图Fig.3 Diagram of experiment environment
3.1 硬件系统的设计与实现
月基极紫外相机电控单元检测系统的结构框图如图4所示,检测系统接收电控单元输出的方位、俯仰和镜头盖步进电机驱动脉冲信号用来驱动步进电机负载模拟电路,由于步进电机驱动脉冲信号的电压为15V,将其输入到A/D转换电路和总线隔离电路之前需要进行电压调整将其调整成电压为3.3V的电平信号,然后再由A/D转换电路进行模数转换,同时通过总线隔离电路后输入到FPGA及其外围电路。A/D转换电路由FPGA进行控制,FPGA还实现对经电压调整后的步进电机驱动脉冲信号的采集、计数、频率分析及相序解析功能。检测系统模拟极紫外相机成像单元实现与电控单元之间的RS-422通讯功能及产生科学数据通过LVDS接口输出到电控单元的功能。检测系统的FPGA与上位机之间通过USB接口进行通讯,USB接口控制芯片采用CYPRESS公司生产的型号为CY7C68013A的芯片,接口由FPGA进行控制,通过上位机可以设置科学数据的类型、传输时间以及通过RS-422通道传输参数的类型、格式以及传输的波特率。FPGA将其接收到的图像坐标数据通过USB接口传输到上位机后由上位机进行实时显示,上位机还实现对图像坐标数据的自动检测功能。

图4 检测系统结构框图Fig.4 Structure diagram of test system

表1 步进电机主要性能参数Tab.1 Performance parameter of stepping motor
极紫外相机主体所使用的3台电机皆为步进电机,步进电机是一种电磁式增量运动执行元件,它将电脉冲输入转换成机械步距角输出,控制输入脉冲的个数就能实现对电动机转动角度的控制。为了检测步进电机驱动电路的功能以及步进电机的控制策略、模拟步进电机运行时的功耗,对步进电机的功能参数进行仿真模拟,极紫外相机所选用的步进电机其主要性能参数如表1所示。本检测系统采用电阻与电感串联实现对步进电机各相参数的模拟,根据表1步进电机的参数,选用电阻值为39Ω/25W的黄金铝罩电阻与电感值为20mH的电感串联来模拟步进电机的相参数。为了检测步进电机的控制策略,需要采集步进电机的驱动脉冲,根据采集到的步进脉冲来检测步进脉冲的电压、频率、相序以及个数,根据步进脉冲的个数即可计算出步进电机的运行角度,进而可以实现对霍尔功能的模拟。
3.2 软件系统的设计与实现
月基极紫外相机电控单元检测系统以FPGA作为核心单元,采用XILINX公司生产型号为XC4VSX55-10FF1148I的 Virtex 4系列FPGA,其内部具有55 296个逻辑单元,24 576个Slices,5 760Kb的 Block RAM,8个 DCM,13个I/O块,640个用户I/O和512个Xtreme DSP Slices,每个Xtreme DSP Slices含有1个18×18乘法器,1个加法器和1个累加器,这些丰富的资源为本系统的实现提供了基础。FPGA的功能框图如图5所示,命令解析和处理模块负责接收上位机发送的各种命令和数据并接收载荷电控箱发送的图像坐标数据,对接收到的命令进行解析处理后控制其它模块工作,对接收到的图像坐标数据通过USB通讯控制模块发送到USB总线控制器。步进电机脉冲解析和处理模块负责对接收到的步进电机脉冲信号进行解析,解析其时序、频率并计算脉冲的个数。本模块采用时钟管理模块提供的频率为10kHz的时钟对步进电机脉冲进行采集,极紫外相机电控单元所提供的步进电机驱动脉冲频率为200Hz,控制方式为四相八拍控制,时序图如图6所示其中图(a)为电机正转时的时序,各相的通电顺序为A→AB→B→BC→C→CD→D→DA,图(b)为电机反转时的相序各相的通电顺序为D→DC→C→CB→B→BA→A→AD。当采集到驱动脉冲下降沿后开始利用前述频率为10kHz的时钟对低电平的持续时间进行计数直到采集到上升沿时结束计数,计数值为N,则步进脉冲频率为(3×10/N)kHz。电机正反转的解析即根据采集到的驱动脉冲的时序以及图6所示的步进电机控制时序来进行,若解析到的时序与图6(a)所示的时序相同则表明电机为正转、反之与图6(b)所示的时序相同则表明电机为反转,进而对正反转的步数进行计数,并将此步数传递给霍尔信号产生单元。霍尔信号产生单元依据命令解析和处理模块提供的步进电机初始位置信息和目标位置信息以及步进电机脉冲解析和处理模块提供的电机正反转步数信息来判断电机的当前位置,当步进电机运行到目标位置时,霍尔信号产生单元即产生相应的霍尔信号。

图5 FPGA功能框图Fig.5 Function diagram of FPGA
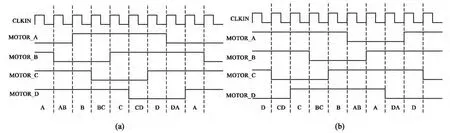
图6 步进电机控制时序图Fig.6 Sequence diagram of stepper motor
A/D控制单元负责控制A/D转换芯片对步进电机驱动脉冲的电压进行采集,将采集到的电压数据传送给命令解析和处理模块,再由其通过USB总线控制器传输到上位机显示。USB通讯控制模块负责对USB总线控制器的时序控制功能,并实现对上行/下行数据的缓存功能,对于上行/下行数据的缓存采用FIFO实现,每块FIFO的容量为256×16bit。图像坐标数据接收及存储单元负责接收由载荷电控箱通过LVDS接口发送的图像坐标数据并进行缓存,图像坐标数据的缓存采用两块FIFO实现,每块FIFO的容量为1k×16bit,采用乒乓控制方式进行存储。各FIFO都设置一个读信号和一个写信号,其初始状态设置如下:FIFO1的,读信号无效,写信号有效;FIFO2读信号有效,写信号无效;当FIFO1的存储区存满后,将FIFO1和FIFO2的读写信号切换,即FIFO1的写信号无效,读信号有效。当FIFO2的存储区存满后,再次切换,依次类推,实现乒乓制的存储功能。为了保证FIFO内没有无效数据,对每一块FIFO进行写操作之前,先需要对该块FIFO进行清零。
时钟管理模块负责接收晶振电路提供的时钟信号,利用FPGA提供的DCM将其进行分频操作为其它模块提供所需的时钟信号。UART模块完成与极紫外相机电控单元之间的RS-422通讯功能。科学数据产生单元和科学数据发送单元负责通过接收上位机发送的科学数据,然后将其按电控单元所要求的数据格式和数传频率进行转换之后发送给电控单元。
USB的接口程序通常由固件程序、驱动程序和应用程序构成,本检测系统所使用的驱动程序和固件程序的架构由CYPRESS公司提供,在此基础上用户提供一个USB描述符表,添加其它端点接收和发送数据的通信代码,以及控制外围电路的程序代码[10]。应用程序的设计以驱动程序为桥梁,对USB设备进行控制,处理USB设备传回的数据。本系统的应用程序使用VC++6.0进行开发,通过API函数使得设备驱动程序和应用程序之间互相通信。
4 验证与实验
本文所述的检测系统在完成了设计和调试之后,与月基极紫外相机电控单元进行了验证测试实验。图7是实验现场的照片,在验证测试实验中对极紫外相机电控单元的功能进行了全面检测,控制三台电机正向和反向各运行5 200步,各自的霍尔在电机运行到200步和5 000步位置时有效,利用检测系统提供的科学数据进行成像功能的测试,为了检测电控单元成像功能的正确性,通过上位机对参数进行设置使得产生的图像坐标数据具备x=y的关系,测试结果如表2所示。从表2的检测结果可以看出检测系统检测到的3台步进电机的运行方向及步数与电控单元实际控制的电机运行方向和步数相同,霍尔A分别在步进电机正向运行到200步或者反向运行到5 000步时产生有效信号,霍尔B分别在步进电机正向运行到5 000步或者反向运行到200步时产生有效信号,测试结果与预期结果一致。
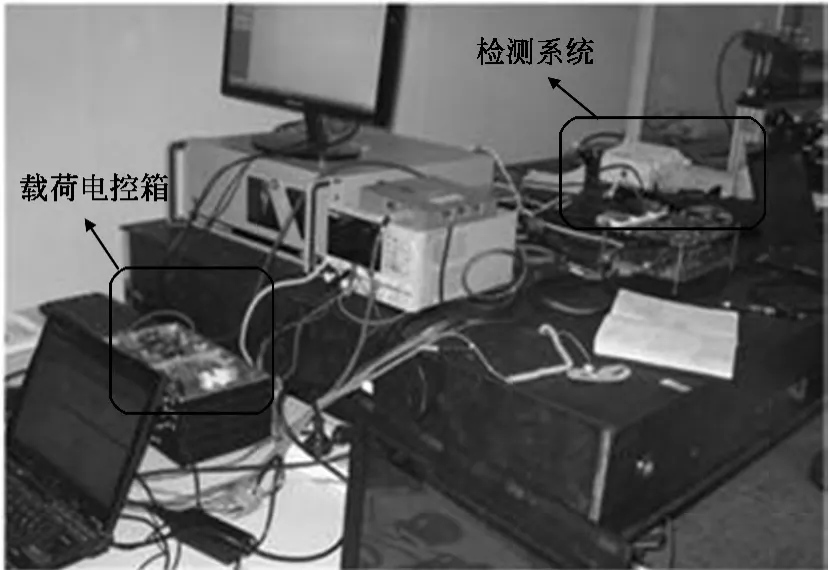
图7 实验现场照片Fig.7 Experimental site photo

表2 实验检测结果Tab.2 Experimental results

图8 实验中所采集的图像Fig.8 Image of experiment
为了检测电控单元成像功能的正确性,通过上位机对参数进行设置使得产生的图像坐标数据具备x=y的关系,如图8所示,从图8可以看出,采集到的坐标数据都处在x=y这条直线上,坐标x和坐标y的值域范围都是[0,1 500],从检测结果可以看出电控单元的图像采集算法正确。
5 结 论
设计了一种月基极紫外相机电控单元的检测系统,该系统以FPGA为核心单元,完整地模拟了电控单元的各外部接口功能,利用USB接口与上位机进行通讯,通过上位机设置各种参数及命令,并接收图像数据并成像。研制完成的检测系统与月基极紫外相机电控单元进行了验证试验,试验结果表明检测系统完整准确地实现了模拟电控单元各外部接口的功能,并能准确地检测电控单元的各项功能和性能。该系统在月基极紫外相机的研制过程中已经得到了充分的使用,对于工程研制任务的顺利进行起到了重要作用。
[1] 何飞,张效信,陈波,等.地球等离子层极紫外波段辐射特性计算 [J].中国科学,2010,40(1):71-76.He F,Zhang X X,Cheng B,et al.Calculation of the extreme ultraviolet radiation of the earth’s plasmasphere[J].Sci.China Tech.Sci.,2010,40(1):71-76.(in Chinese)
[2] 王永成,王金玲,宋克非.月基极紫外相机图像采集与实时显示系统 [J].液晶与显示,2013,28(3):435-439.Wang Y C,Wang J L,Song K F.Image acquisition and display system for lunar-based extreme ultraviolet camera[J].Chinese Journal of Liquid Crystals and Displays,2013,28(3):435-439.(in Chinese)
[3] 李朝辉.月基对地观测极紫外相机光机结构设计 [J].仪器仪表学报,2010,31(10):2352-2356.Li Z H.Opto-mechanical design of lunar based EUV camera for imaging the earth[J].Chinese Journal of Scientific Instrument,2010,31(10):2352-2356.(in Chinese)
[4] 王智,李朝辉.月基极紫外相机光机结构设计 [J].光学 精密工程,2011,19(10):2427-2433.Wang Z,Li Z H.Design of optical-mechanical structure for lunar-based extreme ultraviolet camera[J].Optics and Precision Engineering,2011,19(10):2427-2433.(in Chinese)
[5] 欧阳自远,李春来,邹永廖,等.我国月球探测一期工程的科学目标 [J].航天器工程,2005,14(1):1-5.Ouyang Z Y,Li C L,Zou Y L,et al.The scientific object of the first phase project of Chinese lunar exploration[J].Spacecraft Engineering,2005,14(1):1-5.(in Chinese)
[6] 叶培建,孙泽洲,饶炜.嫦娥一号月球探测卫星研制综述 [J].航天器工程,2007,16(6):9-15.Ye P J,Sun Z Z,Rao W.Research and development of change-1[J].Spacecraft Engineering,2007,16(6):9-15.(in Chinese)
[7] 王晓东,朱小明,吕宝林,等.EUV 成像仪极间串扰和伪信号触发计数修正 [J].光学 精密工程,2012,20(12):2674-2679.Wang X D,Zhu X M,Lv B L,et al.Correction of crosstalk and fake signal trigger of EUV imager[J].Optics and Precision Engineering,2012,20(12):2674-2679.(in Chinese)
[8] 尼启良,何玲平,刘世界,等.使用感应电荷位敏阳极的极紫外单光子计数成像系统 [J].光学 精密工程,2010,18(12):2543-2548.Ni Q L,He L P,Liu S J,et al.Extreme ultraviolet signal photon counting imaging system based on induced charge position-sensitive anode[J].Optics and Precision Engineering,2010,18(12):2543-2548.(in Chinese)
[9] 何玲平,尼启良,李敏,等.楔条形阳极光子计数探测器成像性能的检测 [J].光学 精密工程,2009,17(11):2699-2704.He L P,Ni Q L,Li M,et al.Image performance of photon-counting imaging detector with wedge and strip anode[J].Optics and Precision Engineering,2009,17(11):2699-2704.(in Chinese)
[10] 薛盼盼,王晓东,刘文光,等.空间遥感仪器便携式数据采集试验系统研究 [J].液晶与显示,2012,27(2):257-262.Xue P P,Wang X D,Liu W G,et al.Portable data acquisition test system for space remote sensing instrument[J].Chinese Journal of Liquid Crystals and Displays,2012,33(7):1567-1572.(in Chinese)
