面向我国低密度线路的列车运行控制系统
2015-05-09靳成铭蔡伯根上官伟单洪政
王 剑,靳成铭,蔡伯根,刘 江,上官伟,单洪政
1.北京交通大学 电子信息工程学院,北京 100044;2.北京市轨道交通电磁兼容与卫星导航工程技术研究中心,北京 100044;3.北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044;4.北京佳讯飞鸿电气股份有限公司 产品技术部,北京 100095)
铁路作为国民经济大动脉、国家重要基础设施和大众化交通工具,在我国经济社会发展中的地位和作用至关重要。尤其是在发展相对落后的中西部地区,经济的增长和人民生活的改善,迫切需要加快铁路的建设。根据《铁路“十二五”发展规划》关于“建设以西部为重点的开发性铁路,优化路网布局”的要求,我国将进一步拓展西部路网,扩大路网覆盖面,形成路网骨架。预计到2015年,西部地区铁路营业里程将达到5万km左右。
我国中西部地区自然资源丰富,但由于自然环境极端恶劣、地广人稀,因此铁路网密度低、铁路信号基础设施不完善、客货运输量不高,大部分线路都是单线铁路。在国际上把这类线路定义为低密度线路LDL(Low Density Lines),关于低密度线路没有明确的界定,一般认为线路每天行车在12~15对左右,线路信号系统无法满足潜在的运输需求[1]。
如何在低密度线路上采用先进技术,构建新型列控系统,提高列车运行安全水平,并且降低运营和维护成本,同时能够实现低密度线路与干线之间的跨线运行,已经成为国际上列控系统发展的一个研究热点。同时,面向低密度线路的列车运行控制系统也需要考虑技术的先进性,使其能够满足未来提高运量和列车运行速度的要求。
1 国外发展现状
1.1 ERTMS-Regional
2003年3月,在ETCS-3级基础上,国际铁路联盟UIC提出了ERTMS-Regional(始于20世纪90年代末,当时又被称为ETCS-Low Cost)。ERTMS-Regional是一种能使区域性铁路在更新或引入新的信号设备时节约成本的方案,其思路是利用无线通信和卫星定位导航等先进技术,在保证列车运行安全性和可靠性的同时,尽量减少传统轨旁等地面信号设备[2]。它的适用对象主要是低密度和区域性铁路。
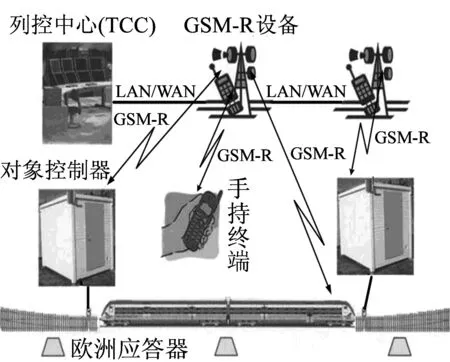
图1 高速列车运行控制系统结构及接口关系示意图
ERTMS-Regional系统抛弃传统的利用轨旁设备的轨道占用检测方式,利用车载设备进行列车定位和列车完整性检查,追踪运行的列车也可以因此得到安全进路信息,不再需要轨道电路。点式设备(应答器)、GSM-R成为系统的重要设备。应答器只提供ETCS等级转换命令;取消了地面信号机和轨道电路后,室外线路上的信号设备减少到最低程度;列车追踪间隔依靠点式设备和无线移动闭塞中心实现,具有明显的移动自动闭塞特征。
ERTMS-Regional的关键特征是:
(1)装备标准的欧洲车载设备;
(2)车载设备提供持续的列车完整性检查;
(3)无轨旁列车位置检测设备;
(4)无轨旁信号机。
ERTMS-Regional是一种基于ETCS-3并适用于低密度线路的新型列控系统。具备了ETCS-3系统的许多特征,但是简化了联锁系统,将联锁和无线闭塞中心RBC合并为列控中心TCC。
ERTMS-Regional首条试验线已于2012年在瑞典正式投入商业运营。目前,ALSTOM公司已经推出了ATLAS-400,ANSALDO-STS公司推出了采用卫星定位以及TETRA通信的列控系统,同时ANSALDO-STS公司在俄罗斯推出了类似的产品ITARUS-ATC,BOMBARDIER公司也推出了基于GPS和TETRA无线通信的列控系统INTERFLO 550。
2012年4月,第一条基于ERTMS-Regional概念的线路已经在瑞典开通并实际运营,标志着首个基于ETCS-3的列控系统已经进入现场应用阶段。
1.2 PTC
自1971年开始,美国国家运输安全委员会NTSB已经强烈要求采用更先进的技术措施来防护人因故障。1994年美国联邦铁路管理局FRA提出了 PTC (Positive Train Control)。2005年,发布了一份关于信号和列车控制系统设计性能标准的最终规定。2008年发生在洛杉矶地区的一起严重的铁路列车相撞事故促使美国总统布什签署了一项铁路安全法案,该法案授权了PTC系统的使用。全美ClassⅠ铁路被国会要求在2015年12月31日前强制安装PTC系统。
PTC可以作为独立的列车自动防护ATP(Automatic Train Protection)系统使用,也可以叠加到既有的ATP系统上,以提高列车运行的安全性。系统的核心目标是:列车碰撞防护、强制列车速度限制、轨旁人员防护[3]。同时该系统具有高性价比、精确的列车跟踪和运行管理能力,具备缩短列车间隔时间以增加运力、降低工作量、减少轨旁设备等优点。PTC系统适用于货运铁路、城际高速铁路、客货混跑的干线铁路等。
基本的PTC系统主要由轨旁、车载和调度/控制3个子系统组成。轨旁子系统由平交道口信号、道岔、联锁等单元组成。车载子系统由车载计算机和定位系统组成。调度/控制子单元是中央控制中心,负责线路运营[4]。PTC系统采用卫星定位技术,使用数字无线电台传输位置报告,追踪列车位置,发送行车许可。PTC系统的远程干预能力可准许控制中心停止一列机务人员无法停下的列车。
目前,已经有多家厂商推出了符合PTC规范的列控产品。包括WABTEC公司的ETMS,GE公司的ITCS,LOCKHEED MARTIN公司的Vital PTC,USS公司的CAS,以及SIEMENS公司的TrainGuard等。在PTC研发过程中,FRA支持通用的车载平台、无线通信管理单元、风险分析、高精度GPS定位等通用技术的开发。
我国青藏线格拉段全长1 142 km的线路上采用了GE公司的ITCS,列车运行状态和控制信息通过GSM-R (铁路移动通信系统)传输,地面不设轨道电路,列车定位及轨道占用检查以GPS为主,并辅助车速传感器以提高定位精度。线路上不设信号机,列车以车载显示作为行车凭证。采用基于GSM-R的无线闭塞方式,沿线每个车站都设有无线闭塞中心[5]。ITCS系统支持最高177 km/h的客运线路[4],支持虚拟固定闭塞方式。该系统自2007年开通运营以来,极大地减少了轨旁设备的维护工作量。
1.3 小结
欧洲ERTMS-Regional和美国PTC系统技术特点见表1。两种系统有着相似的系统结构,系统高度集成、自动化,并采用了卫星定位技术和无线通信技术,用以降低成本、提高效率。有关两个系统间的具体差别,参见文献[6]。
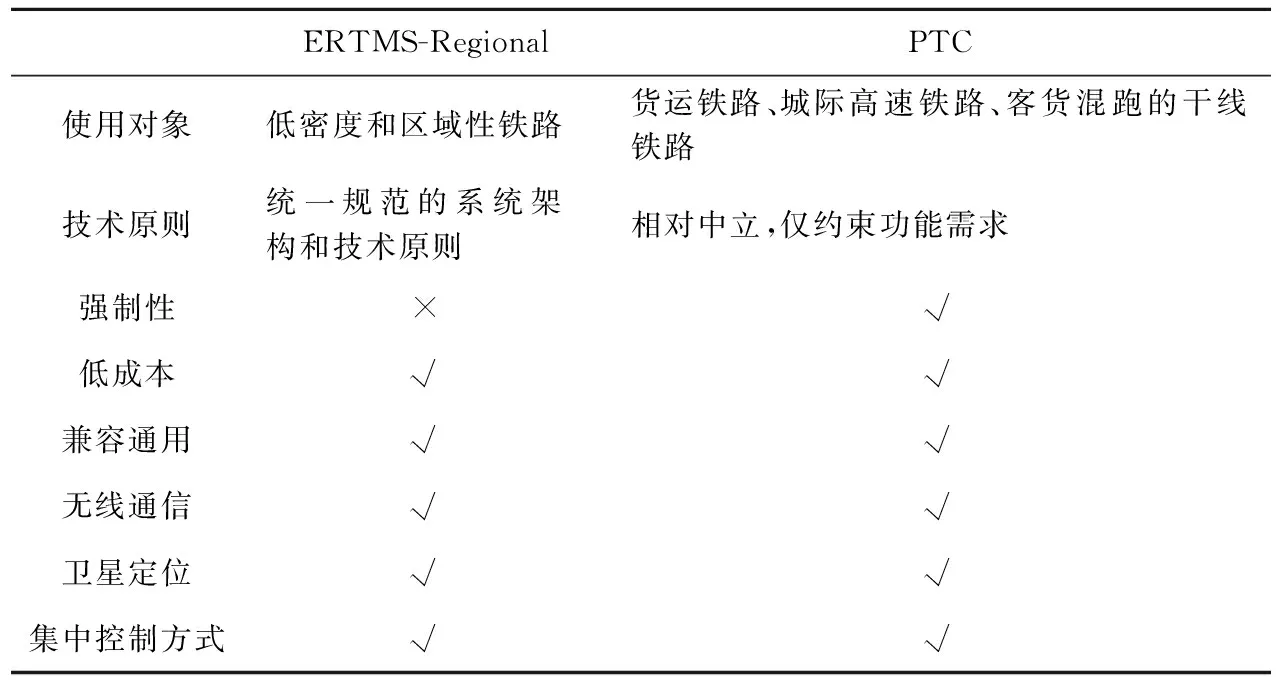
表1 ERTMS-Regional与PTC技术原则比较
2 面向我国低密度线路的列控系统需求及关键技术
2.1 需求分析
我国中西部地区是低密度线路的主要应用区域,其中青藏、青海、新疆等地存在大量的高海拔地区和无人区,严酷的自然环境包括多年冻土、高原缺氧、生态脆弱、天气恶劣等,要求面向低密度线路的列控系统能够实现车站无人值守,尽可能减少或者不设区间设备。
低密度线路列控系统如果按照现有的CTCS标准等级进行建设,将带来高昂的建设、维护和运营成本,而低密度线路一般应用在经济发展水平相对落后的地区。因此,要求列控系统具有低成本特性。
我国绝大部分铁路线路都是按照CTCS标准进行建设,不仅能够节约线路运营、维护以及人员培训成本,通用的系统规范及兼容性设计还使得列车能够方便地跨线运行。低密度线路作为我国铁路网的重要组成部分,其列控系统应当具备兼容、通用性,支持跨线运营。
目前,我国还存在大量的单线、双线铁路,运行速度在160 km/h以下,其中部分线路还没有实现电气化。随着本地区经济发展水平的提升,这些线路存在着改造升级、提高运行能力的需求。因此,面向低密度线路的列控系统应当能够在既有线升级改造中充分利用既有的设备,降低改造成本。
西部地区幅员辽阔,矿产资源的储量十分可观。西部地区的煤炭占全国的60%,石油占45%,天然气占53%。全国已探明的140多种矿产资源中,西部地区就有120多种,一些稀有金属的储量名列全国乃至世界前茅。铁路作为交通运输的大动脉,应当支持高速客车和低速货运列车的混合运输方式。
列控系统具有保障行车安全、提高运输效率的天然属性。
基于我国低密度线路的以上实际需求,结合国内外ERTMS-Regional和PTC系统设计经验,提出面向我国低密度线路的列车运行控制系统CTCS-LDL基本技术原则如下:
(1)CTCS-LDL列控系统主要适用于低密度铁路,线路的货运业务大于客运业务,时速160 km以下,每天行车小于15对,年货运量小于500万t;
(2)CTCS-LDL列控系统的轨旁设备尽可能减少或不设;
(3)CTCS-LDL列控系统兼容既有站计算机联锁和轨道电路等信号设备,无人值守站列车、调车作业自动化;
(4)CTCS-LDL列控系统采用虚拟闭塞制式,闭塞区段能够根据运量进行灵活调整,以提高运输能力;
(5)CTCS-LDL列控系统以车载设备为中心,车载设备完成自主定位和列车完整性检查,车载设备采用目标距离-连续速度控制模式、设备制动优先的方式监控列车安全运行;
(6)CTCS-LDL列控系统采用GSM-R无线通信方式完成车地双向通信;
(7)CTCS-LDL列控系统满足跨线运行的运营要求。
2.2 关键技术分析
基于以上CTCS-LDL列控系统基本技术原则,对系统应当采用的关键技术进行分析,为进一步提出系统总体设计方案提供依据。
2.2.1 测速测距
传统CTCS列控系统通常采用安装在列车车轴上的速度传感器完成列车的测速和测距,同时使用地面应答器校准测距误差。应答器不仅能够辅助车载定位单元完成绝对定位,还能向列车控制系统传送线路基本参数、线路速度、列车运行目标数据、临时限速、车站进路等补丁和实时可变信息,是CTCS-1、CTCS-2、CTCS-3级列控系统中重要的轨旁设备。为了完成列车定位,应答器必须高密度地布设在轨道上,例如高速铁路的闭塞分区长度一般小于2 km,分区入口需要布设应答器,这将带来昂贵的建设成本[7],低密度线路恶劣的自然环境进一步增加了应答器的维护成本。区间大量布设应答器也不符合CTCS-LDL的基本技术原则。
卫星定位具有定位精度高、覆盖范围广等特点,同时又不需要在轨旁安装设备,能够替代应答器完成列车定位功能。卫星定位与其他传感器的组合定位技术,也符合CTCS[8]、ETCS[9,10]、PTC[11]系统发展的趋势,高精度数字轨道地图的辅助能够进一步提高定位精度。青藏线采用基于GPS的定位技术实现列车动态位置跟踪。在区间坡度较大,易产生打滑的区域和隧道等卫星定位盲区,为消除影响可采用车轮传感器、测速雷达等进行物理纠偏和消除累积误差[12]。
因此,面向我国低密度线路的列控系统中,列车的自主测速测距可以采用卫星定位技术。
2.2.2 区间轨道占用检查
列车在区间运行采用的是空间间隔法,即两列运行列车保持一定的距离,一个区间同时只允许一列列车运行,从而保证安全。空间间隔法的前提是能够准确确定列车所处的区间,即轨道占用检查。
轨道电路和计轴是常用的区间轨道占用检查方法。两种方法都要求在每个区间(或闭塞分区)安装轨旁设备,不符合CTCS-LDL列控系统的技术原则。同时,低密度线路沿线恶劣的自然环境并不一定适合轨道电路[13]、计轴设备在区间的布设。青藏线格拉段区间轨道占用检查采用的是GPS定位技术。卫星定位由于是一种绝对定位方式,定位精度高、适用范围广,因此能够替代传统的轨道占用检查方式。同时,在既有技术条件下,考虑到调车的便利性,在站内仍可保留轨道电路。
因此,面向我国低密度线路的列控系统中,区间轨道占用检查由卫星定位方式实现。同时,系统兼容使用轨道电路、计轴等轨旁设备完成占用检查的车站。
2.2.3 车地通信
CTCS列控系统中,车地通信的主要方式有轨道电路、应答器、GSM-R。其中,轨道电路和应答器只能进行车-地单向通信,且数据量较小。GSM-R作为一种无线通信方式,在CTCS-2、CTCS-3级列控系统中均作为重要的车地通信方式。低密度线路恶劣的自然环境决定了采用无线通信方式具有先天优势。GSM-R作为CTCS体系中重要的车地无线通信方式,也是未来CTCS发展的技术方向,技术兼容性、通用性较好,安全性也经受了多年的线路运营考验,青藏线ITCS系统也采用GSM-R技术。
因此,在面向我国低密度线路的列控系统中,车地通信应采用GSM-R,并可取代应答器、轨道电路、轨旁信号机完成进路过程中的车地通信功能。考虑到GSM-R的覆盖范围将影响到线路的运输能力,GSM-R宜做到线路全覆盖。
2.2.4 车站进路控制
进路分为调车进路和列车进路两种。CTCS-LDL能够自动、安全、高效地完成进路功能,在保证列车进路的同时,尽可能提高调车进路的便利性。
联锁是完成车站进路控制的重要设备。联锁设备分为非集中联锁和集中联锁两大类,集中联锁又分为继电器联锁和计算机联锁CBI。非集中联锁设备已逐渐被淘汰。继电器联锁由继电器组成逻辑电路,难以表达和实现复杂的逻辑关系,安全性、可靠性、经济性都无法和CBI比拟,同时也不便于与现代化信息系统联网,设计、施工和维护也不如CBI方便[14]。我国装备CBI的车站已经有上千座,系统运行安全、可靠。
因此,CTCS-LDL车站应当采用当前CBI方式。如前面所述,轨道占用检查功能可由卫星定位技术实现,传递行车信息功能可由GSM-R实现。因此,面向我国低密度线路的列控系统中,站内可不设轨道电路、信号机、应答器。
为满足无人值守站进路控制,需要能够远程控制进路,CBI不具备远程操作功能,通常情况下CBI和分散自律调度集中系统CTC配合使用,完成进路控制。正常情况下,CTC中心子系统将列车运行调整计划下达给所辖各站的车站CTC子系统自律机。自律机根据车站的具体情况,在保证列车计划不受影响、调车作业收到列车计划约束的条件下,自主地将列车计划和调车作业信息变换成列车进路指令和调车进路指令,最终交由车站联锁系统实现进路、道岔、信号机之间的联锁关系,完成进路功能。
CBI和CTC虽然协作完成进路控制,但两个系统一直作为独立的系统发展。2006年,青藏线CTC的开通也表明,CTC能够适用环境恶劣的区段。
因此,面向我国低密度线路的列控系统中,应当采用站内CBI和CTC进路控制方式。
2.2.5 区间闭塞
闭塞方式一般可以分为:半自动闭塞、自动站间闭塞、自动闭塞。由于闭塞制式对线路运营能力有着直接影响,CTCS-LDL应当采用自动闭塞,使得系统具有灵活性,并以虚拟固定闭塞作为基本闭塞方式。不同线路可以根据自身线路条件、运输能力要求等选择适合的闭塞分区长度。
为完成区间闭塞控制,列车完整性信息必不可少。目前主要采用轨道电路或计轴设备实现列车完整性检查。但是,像青藏线格拉段这样的线路,如果采用计轴方式实现自动闭塞,在区间每个闭塞分区内需要安装计轴设备,设备可靠性无法保证,且维护难度极大,不符合CTCS-LDL基本技术原则。因此,采用轨道电路或计轴完成列车完整性检查,只适合安装在站内。从前面的讨论可知,卫星定位技术能够用来完成列车测速测距,因此,在列车头尾加装基于卫星导航的定位设备能够完成列车完整性检查功能。
同时,我国货物列车的完整性检查主要靠机车和列车尾部安装的无线发射和接收装置监测列车尾部风管风压,并通过数传电台将风压信息反馈到机车司机控制盒完成。由列车完成自身完整性检查的优点在于不再依赖轨旁设备,并且是一种连续的检查方式,能够支持移动闭塞。除ERTMS-Regional和PTC外,ETCS-3系统方案中,列车完整性检查由车载设备负责的都是既定的技术路线。然而,根据我国现行标准,列尾装置每120~130 s随机自动发送自动风压查询命令信息[15],如果列尾设备故障,地面至少需要120s才能获知。在一定程度上,限制了移动闭塞的使用。
因此,面向我国低密度线路的列控系统中,应当使用基于卫星定位技术的车载设备完成列车完整性检查。传统货车尾部的列尾装置需要加装卫星接收机并进行安全性改造,以满足铁路安全相关系统的安全完整性要求。
区间采用虚拟固定闭塞,由于闭塞分区是虚拟划分的,区间不设轨道电路、信号机等轨旁设备。CTCS-2级中的列控中心TCC无法完成行车许可的下达,CTCS-LDL列控系统适合使用无线闭塞中心RBC管理区间闭塞,生成移动授权。综合考虑各种限制条件和运行调试、维修维护的便利性,RBC主机宜像CTCS-3级列控系统一样集中设置。
CTCS-3中RBC需要通过TCC接收轨道电路的信息获知区间轨道占用情况,并满足后备CTCS-2级列控系统的需要。CTCS-LDL采用卫星定位实现区间轨道占用检查,因此,装备CTCS-LDL系统的车站不需要设置TCC设备。
2.2.6 跨线运营
考虑到CTCS机车很少有从干线发往低密度支线的需求,因此只考虑CTCS-LDL机车跨线运行至其他线路的情况。
2.3 小结
综上分析,本文所提出的技术原则符合我国低密度线路列控系统的需求,系统所采用的关键技术能够适应我国低密度线路的特殊要求。CTCS-LDL虽然运行速度是CTCS-1级,然而系统中列车定位和列车完整性检查均由车载设备完成,地面取消了轨道电路和信号机等轨旁设备,符合CTCS-4级的技术特征。
3 面向我国低密度线路的列控系统总体方案
CTCS-LDL列控系统地面设备总体结构如图2所示。在线路始端或终端设置一个控制中心,包含临时限速服务器TSRS、RBC、GSM-R等设备。
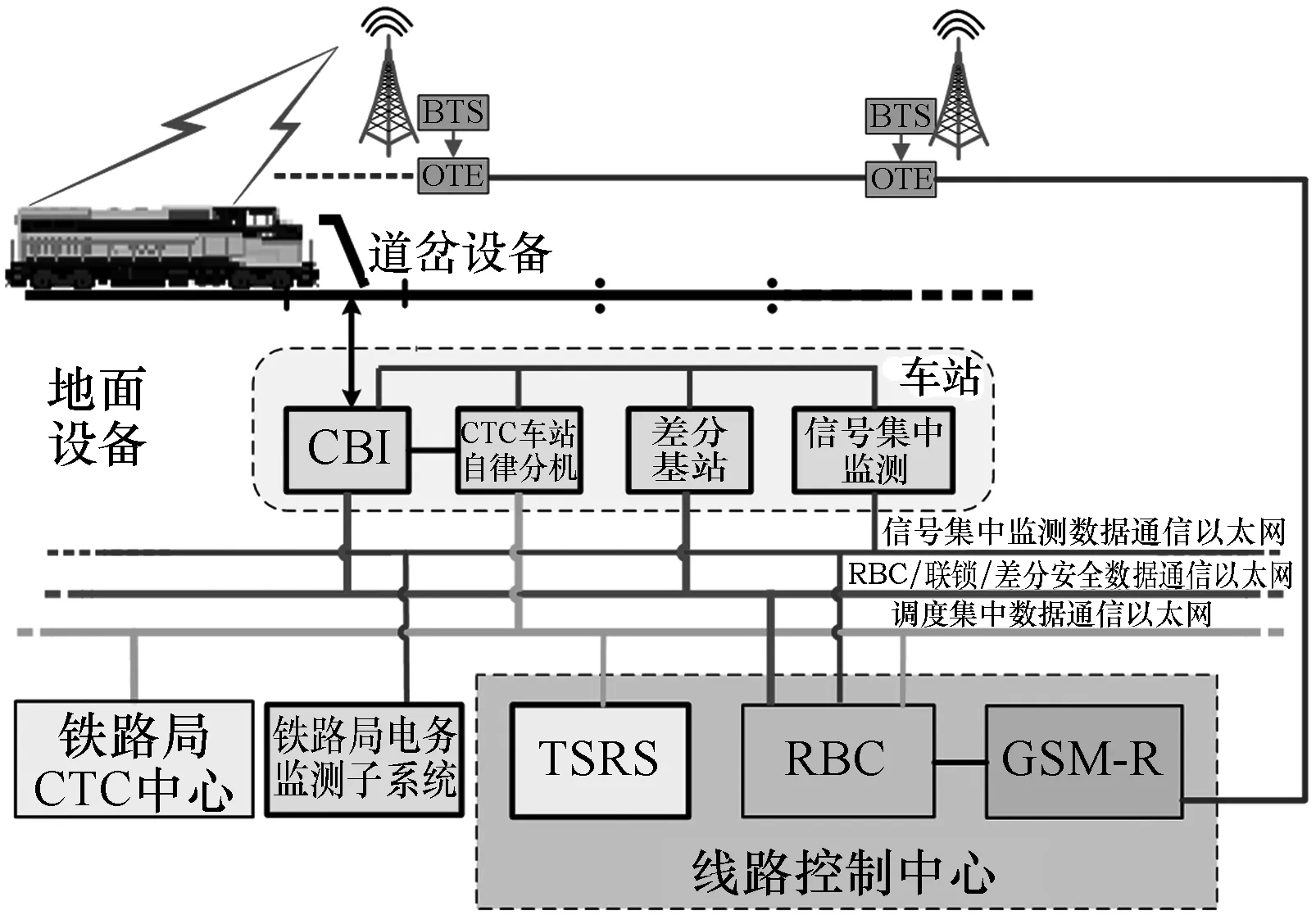
图2 CTCS-LDL列控系统地面设备总体结构
TSRS统一管理整个线路的临时限速命令,通过“调度集中数据通信以太网”接收来自CTC中心的临时线路指令,根据临时限速的具体位置,通过“调度集中数据通信以太网”转发给相应的RBC,RBC经由GSM-R无线通信系统转发给车载设备执行。
RBC通过GSM-R接收列车发送的定位、轨道占用信息,通过“RBC/联锁/差分安全数据通信以太网”接收联锁进路等信息,最终生成行车许可,通过GSM-R将行车许可、线路参数、临时限速传输给CTCS-LDL车载设备。当一台RBC的控制能力无法满足线路要求时,除线路控制中心设置的RBC外,还应根据控制能力、接口能力及维护适应性等因素确定每条线路所需要的RBC数量,在线路控制中心增设RBC。RBC还通过“RBC/联锁/差分安全数据通信以太网”接收管辖范围内车站差分基站发送的差分改正信息,并将信息转发给差分基站有效覆盖范围内的车载接收机,完成差分定位,提高列车定位精度。
信号集中监测系统由车站信号集中监测和铁路局电务监测子系统组成,两者通过“信号集中监测数据通信以太网”连接。车站信号集中监测负责数据的采集、分类、逻辑分析等,通过统一的标准接口与CBI、差分基站、CTC等设备通信,获取监测信息。铁路局电务监测子系统是整个铁路局集中监测系统的监控中心,并提供与铁路总公司通信管理机等节点的通信连接等功能。
CTCS-LDL列控系统地面车站设备由CBI、CTC车站自律分机、差分基站和信号集中监测系统组成。
CBI只采集/控制站内道岔,站内轨道区段占用信息由RBC根据列车所处的区段判定。CTC车站自律分机保持既有设置不变,与CBI、RBC等设备的接口及数据协议基本同CTCS-3级列控系统相应的接口规范一致。差分基站负责向半径约30km范围内的车载接收机提供差分改正信息,以提高车载接收机定位精度,如果车站间距大于60km,则需要在区间设置差分基站。如采用星基差分,则地面不需要设置差分基站。
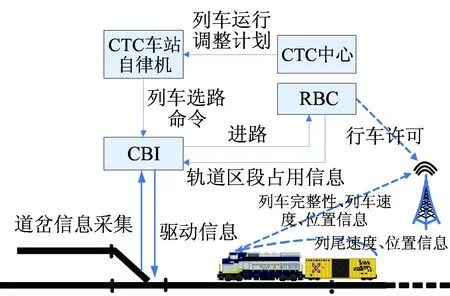
图3 列车进路控制
CTCS-LDL列车进路控制如图3所示,具体列车进路控制过程为:
步骤1CTC中心将列车运行调整计划传送到CTC车站自律机。
步骤2车站自律机收到来自CTC中心的计划后,自动将列车运行调整计划转换为列车进路指令序列。等到排列进路的规定时机一到,车站自律机向CBI下达进路控制命令。
步骤3RBC接收来自车载的列车完整性、速度、位置等信息,通过高精度数字轨道地图的辅助,确定列车占用的轨道区段,并发送给CBI, CBI同时采集进路区段的道岔信息,在检查进路能够建立后,驱动道岔到规定位置,完成进路的选择。
步骤4CBI锁闭进路,向RBC发送列车的进路信息。
步骤5RBC通过GSM-R接收列车的状态信息,并根据进路信息向列车发送行车许可。
步骤6列车根据行车许可中允许列车到达的最远位置以及相关的线路数据信息完成列车进路,并由CBI解锁进路。
CTCS-LDL车载设备由列首设备和列尾装置组成。列尾装置具备目前货车所用列尾设备的功能,但是实际性能更高,并将传统的列尾装置由非安全设备上升到安全设备级别。列首设备基于CTCS-3级列控系统车载子系统方案,由核心计算机VC、列车测速测距单元/完整性检查列首设备LDS/HOT、无线通信管理单元CMU、列车接口单元TIU、人机交互单元DMI、司法记录器JRU、轨道电路接收器TCR、应答器模块BTM、列车运行监控装置LKJ组成,如图4所示。
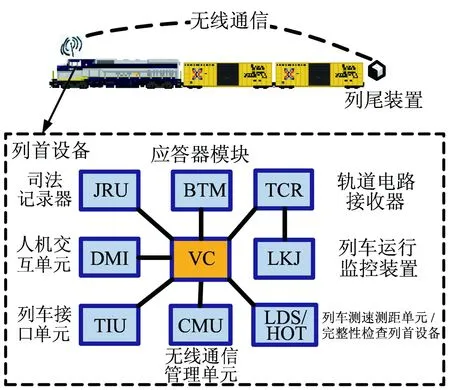
图4 CTCS-LDL系统车载(列首)设备组成
CMU具备CTCS-3系统车载的无线通信单元、GSM-R车载电台功能,并具备450M机车电台的无线通信功能。
列车测速测距单元完成列车的连续定位功能。列车完整性检查设备与列尾装置配合,完成列车完整性检查,并及时通过CMU发送到地面,作为RBC计算移动授权的依据。
VC根据地面播发的移动授权计算列车速度曲线,完成列车控制。DMI用于显示列车状态、控制信息给司机,便于司机完成驾驶功能。
TCR、BTM和LKJ则同既有列控系统相同,主要用于既有线路区段行车,在新建的CTCS-LDL列控系统线路上,TCR和BTM不参与控车。CTCS-LDL车载子系统包含上述设备,使得装备CTCS-LDL车载子系统的列车能够跨线运行至既有CTCS线路,保证系统通用性和兼容性。
CTCS-LDL列控系统车载列尾装置与列首设备间的无线通信可采用GSM-R方式,450M作为后备方式。列尾装置由无线通信管理单元、GNSS/惯性传感器组合定位模块、风压检测模块组成。其中,风压检测模块兼容目前列尾装置风压查询、告警等功能,GNSS/惯性传感器组合定位模块完成列车尾部绝对位置的确定,并及时将定位信息通过450M/GSM-R无线通信网络发送给HOT,完成列车完整性检查。
4 结论
我国低密度线路自身的特点对既有CTCS列控系统提出了新的要求,本文介绍了国外卫星定位技术在列控系统的应用现状,通过对面向我国低密度线路的列控系统需求和关键技术分析,提出一种符合我国低密度线路要求的CTCS-LDL列控系统总体方案。
基于卫星导航系统的组合定位方式是列车定位技术的发展趋势,也是我国CTCS列控系统的发展方向。随着北斗卫星导航系统的建设,其必将在未来铁路交通运输系统中发挥重要的作用。采用先进定位和通信技术的CTCS-LDL作为CTCS的有益补充,也将进一步推动和完善我国铁路信号系统体系的发展。
参考文献:
[1]BIALON A, GRADOWSKI P. Low Market Density Lines for ERTMS Regional System[J]. Archives of Transport System Telematics, 2009, 2: 37-40.
[2]王剑, 张福隆, 蔡伯根, 等. ERTMS-Regional发展综述[J]. 铁道学报, 2012, 34(1):60-64.
WANG Jian, ZHANG Fu-long, CAI Bai-gen, et al. Review on Development of ERTMS-Regional[J]. Journal of the China Railway Society, 2012, 34(1):60-64.
[3]LINDSEY R. Positive Train Control in North America[J]. IEEE Vehicular Technology Magazine, 2009, 4(4):22-26.
[4]HARTONG M, GOEL R, WIJESEKERA D. Communications Based Positive Train Control Systems Architecture in the USA[C]// IEEE 63rd Vehicular Technology Conference, 2006. VTC 2006-Spring. IEEE, 2006, 6: 2987-2991.
[5]逯宗田. 青藏线ITCS系统[J]. 铁道通信信号, 2007, 43(8):12-13.
LU Zong-tian. ITCS Train Control System on Qinghai-Tibet Railway[J]. Railway Signalling & Communication, 2007, 43(8):12-13.
[6]RAYMOND G, LINDSEY R, PACHL J. ERTMS Regional and North American Dark Territory: A Comparison[C]// ASPECT,2012:1-13.
[7]王剑,蔡伯根,等. 基于GNSS的虚拟应答器捕获算法的研究[J]. 铁道学报, 2011, 33(4):73-79.
WANG Jian, CAI Bai-gen, et al. Research on Acquisition Algorithm of GNSS-based Virtual Balise[J]. Journal of the China Railway Society, 2011, 33(4): 73-79.
[8]中国铁路总公司科技管理部. TJ/DW074-2004. CTCS技术规范总则(暂行)[S]. 北京:中国铁道出版社,2004.
[9]BEDRICH S, GU X. GNSS-Based Sensor Fusion for Safety-Critical Applications in Rail Traffic[C]//Proceedings of NAVIT EC, 2004:1-8.
[10]ALBANESE A, MARRADI L, LABBIENTO G, et al. The RUNE Project: the Integrity Performances of GNSS-Based Railway User Navigation Equipment[C]// ASME/IEEE 2005 Joint Rail Conference, 2005: 211-218.
[11]Department of Defense, Department of Homeland Security, Department of Transportation. Federal Radio Navigation Plan[R]. 2014:4-26.
[12]李凯. 青藏铁路ITCS信号控制系统方案[J]. 中国铁路, 2005,(7):31-36.
LI Kai. Signal System Scheme of ITCS System[J]. Chinese Railways, 2005,(7): 31-36.
[13]王俊峰, 张勇,等. 青藏线无线机车信号系统研究[J].铁道学报, 2002, 24(3):112-117.
WANG Jun-feng, ZHANG Yong, et al. Research on the Radio Based Cab Signaling System Used for Qinghai-Tibet Railway[J]. Journal of the China Railway Society, 2002, 24(3): 112-117.
[14]刘朝英,林瑜筠. 铁道信号概论[M]. 北京:中国铁道出版社, 2011:84-104.
[15]中国铁路总公司运输局电务部. TJ/DW009-2012旅客列车尾部安全防护装置技术条件V2.1[S]. 北京:中国铁道出版社, 2012.
