超宽带在无线定位技术中的应用综述
2015-05-06童凯翔李广侠田世伟
童凯翔,周 轩,李广侠,刘 冰,田世伟
(1.解放军理工大学 通信工程学院,南京 210007;2.61773部队,乌鲁木齐 830014;3.中国科学院 光电研究院,北京 100094)
超宽带在无线定位技术中的应用综述
童凯翔1,周 轩2,李广侠1,刘 冰3,田世伟1
(1.解放军理工大学 通信工程学院,南京 210007;2.61773部队,乌鲁木齐 830014;3.中国科学院 光电研究院,北京 100094)
超宽带技术具有高数据传输速率,高时域分辨率及强穿透性等优点,其在短距离,环境复杂的无线传感网络定位技术中引起了人们极大的兴趣。主要通过对超宽带技术的发展历程阐述以及结合大量最新的工作,总结技术发展轨迹,探讨基于超宽带技术的无线网络中的定位技术、算法。结合一些最新的研究成果,讨论基于超宽带的无线定位技术仍存在的问题与发展方向。
超宽带;无线网络;定位技术
1 引言
以全球定位系统(global positioning system,GPS)为代表的卫星导航定位系统在世界范围内,不论军用还是民用方面都得到了广泛的应用,为人们的出行等一系列社会活动提供了极大地便利。然而基于卫星信号的导航定位并不总是有效的,主要体现在当用户处于森林、城市、峡谷及室内等挑战环境中,尤其是当楼房等物体遮蔽造成信号大幅度地衰减及面对复杂室内多径环境的问题时,卫星导航信号的检测本身就存在一定的困难,即使检测到了,也会存在较大的定位误差[1]。同时,在具体的室内定位问题中用户一般不需要知道精确的经纬度坐标,而相对一些特定坐标点的相对位置坐标在很多情况下显得更有意义[2]。
因超宽带(ultra wide band,UWB)信号具有其极强的穿透能力,极高的时域分辨率[3-4]等特性,UWB技术成为解决上述定位问题的重要手段,基于UWB技术的定位也成为定位领域一个研究热点,得到了学界和业界的广泛关注。
UWB信号是拥有超过中心频率20%相对带宽或者绝对带宽超过500 MHz的信号[5]。UWB技术就是基于这样一系列的占用很大带宽的信号来实现各种应用的无线电技术。大的带宽保证了其极强的穿透能力,而其在时域上精细的分辨率也为提高测距、定位精度提供了坚实的保障。
UWB技术始于20世纪60年代后期,一开始仅仅因其优越的穿透性和类噪声性被军事领域应用于监听技术[6]。直到上世纪末该项技术引起了美国联邦通信委员会(Federal Communications Commission,FCC)的注意,这项技术才逐步开始民用以及商业化的进程。
本文旨在以IEEE 802.15.4a[3]协议为基础,描述协议定义的物理层性质,由此展开在无线网络中的定位技术、算法与相关的工作研究,通过对一些最新的研究的综述,来描述UWB技术在定位方向上的发展历程与研究方向。
2 IEEE 802.15.4a规定的帧结构
IEEE 802.15.4a规定了信号传输采用的帧结构,包括了一个同步头(synchronization header,SHR)、一个物理层报头(physical layer header,PHR)以及一个数据字段(PHY service data unit,PSDU)[3]。其中SHR由两部分组成——测距前导码(synchronization,SYNC)和帧分隔符(synchronization frame delimiter,SFD)。
简单地来说,帧同步头就是为了正确接收信号,在测距与定位技术中同样需要以帧结构为基础来判断所接收的信号是否为有用的UWB信号。SYNC与SFD都是用于同步与测距的[7],通过对收到的无线电波的分析得到正确的PHR接收时刻,从而得到两点之间的距离信息。
3 基于UWB技术的无线网络定位
本节主要综述目前可与UWB技术较好结合的一些无线网络中的定位技术与算法[5,8]。
为了更好地展开叙述,在此先定义在无线网络定位中普遍存在的两类节点:
1)参考节点(reference node):在网络中已知坐标位置的节点;
2)目标节点(target node):在网络中未知自身坐标,希望通过定位算法获得自身绝对位置坐标或同参考节点的相对位置坐标[8]。
3.1 无线定位技术综述
3.1.1 基于到达信号角的测量
目标节点通过来自于参考节点的无线电信号得到自身关于参考节点的角度信息。如图1所示,一般在一个二维平面结构中,至少需要两个参考节点来确定目标节点的位置[5]。到达角(arrival of angle,AOA)一般要求目标节点通过一个天线阵列来获得较为精确的角度测量[9],如图2所示。
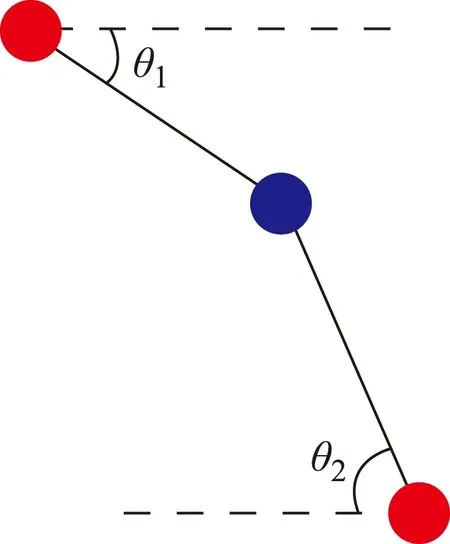
图1 AOA测量角度信息
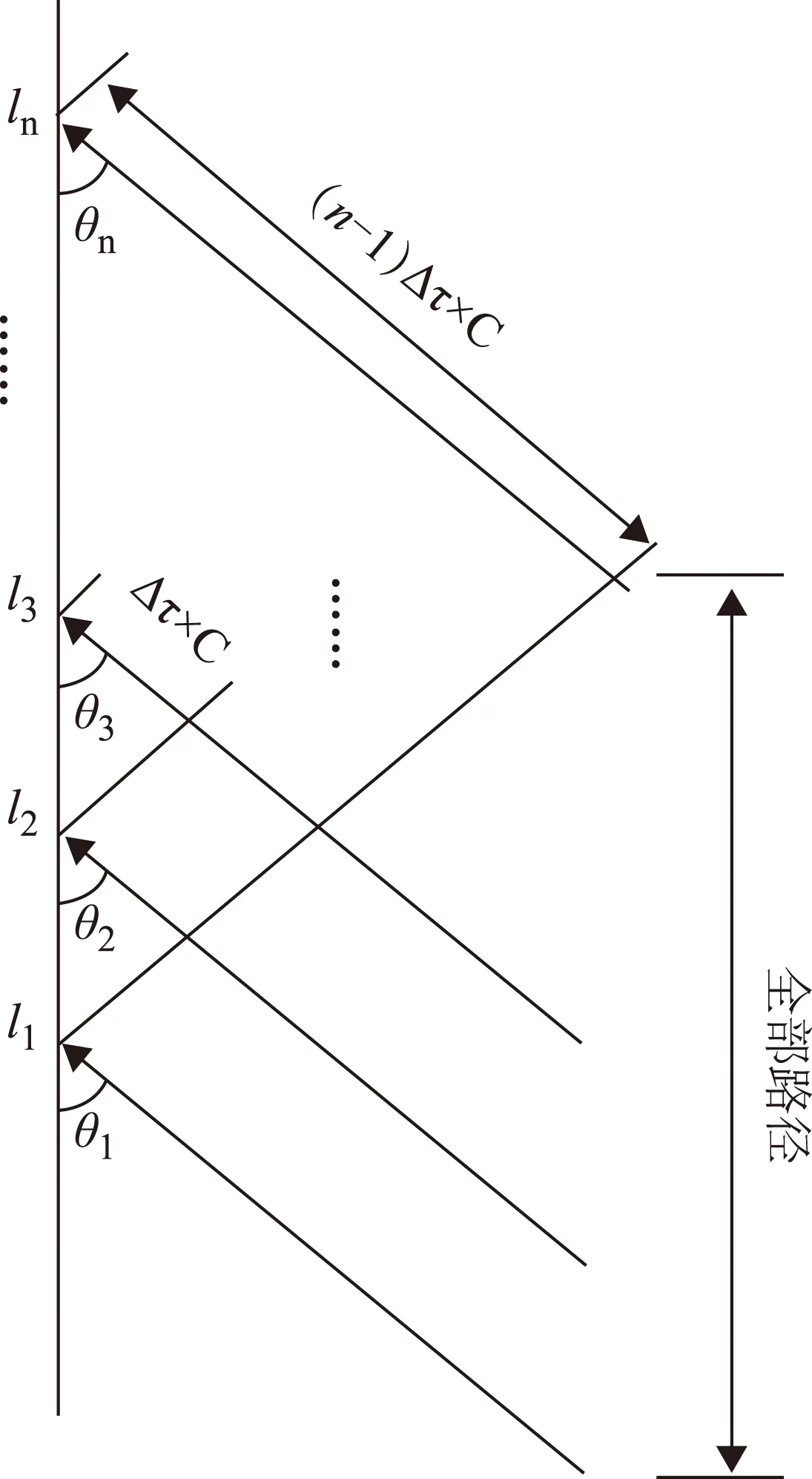
图2 AOA天线阵列
AOA因为不涉及距离信息的提取,在算法复杂度以及实现上都较为简单,但是文献[5]指出AOA并不适用于UWB定位系统,原因主要有两点:1)天线阵列的使用加大了系统的成本开销,很难推广与民用;2)在室内复杂多径环境下,到达天线的信号的路径的数量可能会非常之大,利用AOA仍然很难从中分离出有效的信息,与基于时间测度(time-based)或者说基于测距(ranging-based)的技术来说性能较差。
然而,在本文第4部分也会提到,随着制造工艺的进步和AOA与其他定位技术(如TOA,RSS等)的联合应用,在不提高成本的情况下能够较好地提高定位精度,所以笔者认为AOA仍是一个重要的研究领域。
3.1.2 基于到达信号传播时延或时延差的测量
基于时间测度的定位技术的核心就是测量目标节点与参考节点之间信号的传播时间,到达时间(time of arrival,TOA)和到达时间差(time difference of arrival,TDOA的大致思想分别如图3和图4所示[6],需要一个目标节点和至少3个参考节点。TOA测量目标节点与参考节点之间独立的传播时间τ, 利用d=c×τ, 得到彼此间距离(c为光速),利用三个圆的交点来确定目标节点坐标。TDOA则利用两个参考节点信号传播的时间差Δτ来推算与两个参考节点的距离差,一个距离差确定一条双曲线,利用双曲线的交点来确定目标节点的位置。
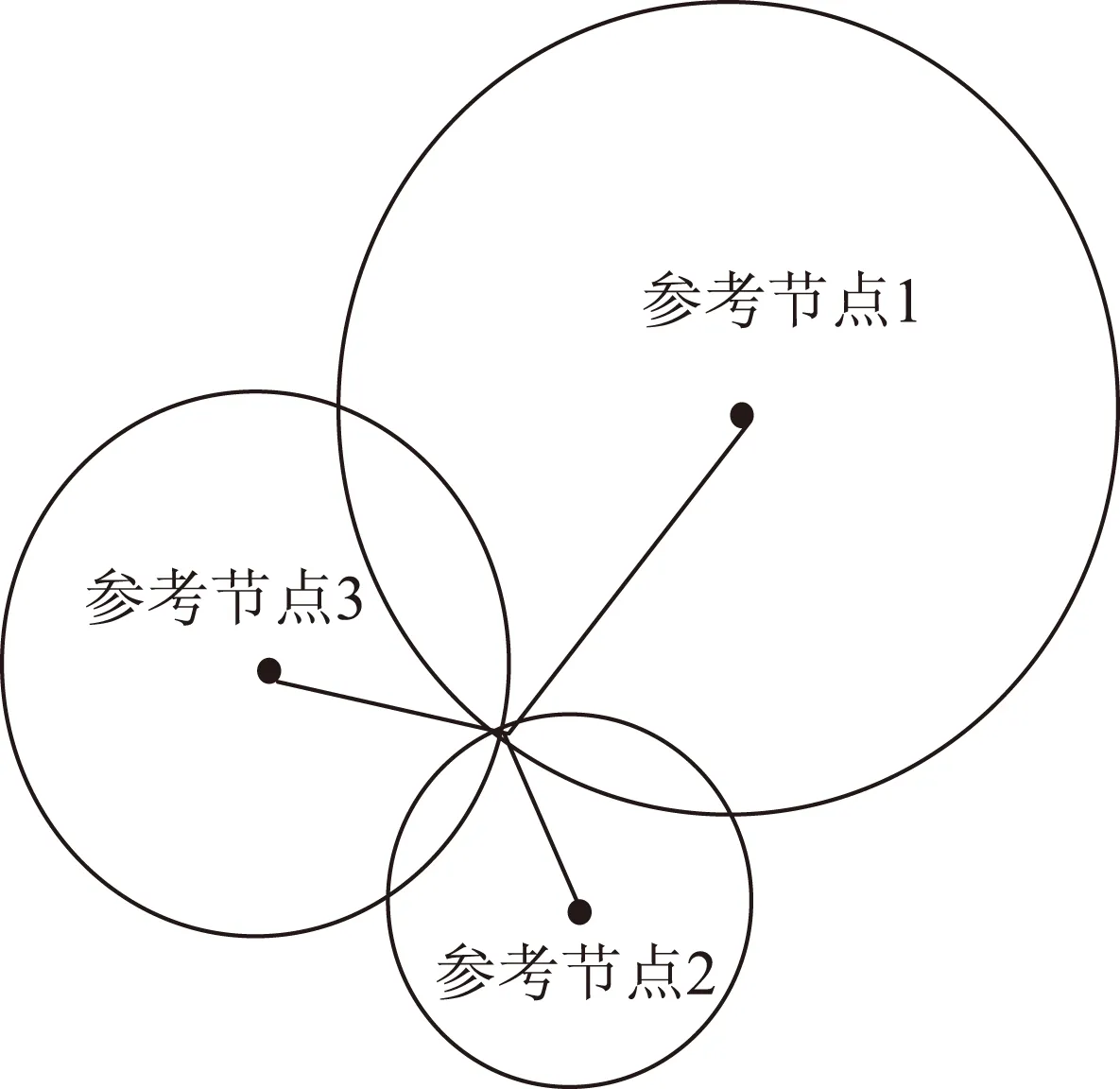
图3 TOA的测距定位模型

图4 TDOA的测距定位模型
当使用TOA和TDOA这种基于时间测距的定位技术时,非视距(nonlineofsigh,NLOS)带来的影响必须要进行考虑,因为信号的NLOS传播会导致最终的测距结果始终存在一个正的偏差。同时,由于多径效应的存在,除了来自于直达路径的信号(很可能由于阻挡而导致信号强度非常微弱)以外,经过反射、衍射的信号也同样可以到达接收端[10],从而造成对于τ的错误估计。文章第4部分也会列举相应的文献,针对多径环境下测距的精确性进行研究。
3.1.3 接收信号强度
基于接收信号强度(received signal strength,RSS)的定位方法仍然基于测距原理,通过式(1)[8]建立接收信号强度的衰减模型为
(1)
式(1)中,Prec为接收到的信号强度,P0为基准位置d0处的基准信号强度,np为信号强度衰减指数。显然,这种方法需要先验的信道模型信息以及传输信号功率信息。文献[5]也指出在一般的无线网络中,目标节点与参考节点的距离一般比较近,而UWB信号极大地带宽性质使得衰减很微弱,单一使用RSS很难提供所需要的测距精度,一般而言,使用UWB技术测距时,RSS可与其他方式结合使用。
3.1.4 模式匹配(Pattern matching)
模式匹配的另一种称呼为“指纹学习”(Fingerprinting),与许多其他学科中的模式匹配一样,Fingerprinting也是一种基于学习的算法。通过提取接收到的信号的有关传播参数,称这些参数为“位置指纹”(location fingerprints),并在数据库中找到与之最为匹配的位置信息[11]。
3.2 无线定位算法分类
无线定位算法分类的依据有许多种:根据信息处理位置的不同可以分为集中式与分布式算法、根据用户能获得的定位信息多少分为系统级与代理级算法、根据有无对所处环境的先验知识分为基于特点环境的与基于随机环境的算法、根据位置信息的表达方式分为绝对式与相对式的算法,还可以分为协同定位与非协同定位[8]。
4 基于UWB定位精度的研究与新算法
4.1 无线网络中实现定位的问题
不论是基于IEEE 802.15.4的UWB通信体制,还是基于802.11的WiFi通信体制都会遇到一些相同的问题。例如NLOS带来的问题以及如何尽可能地提高定位精度都是需要面对的难题。本小节通过引用一些经典的文献与最新的文献,大致总结一下相应研究领域的研究方向。
4.2 相关研究与最新进展
文献[7~17]针对如何解决多径效应带来的测距定位误差做出了深入的研究,文献[16,18~23]在提高测距精度方面做出了不同方面的尝试与努力,研究工作不仅仅局限于理论与软件仿真,也有很多进行了卓有成效的硬件实现。由于篇幅所限,本小节仅列举一些有代表性的文献工作。
4.2.1 定位算法与精度
文献[7]基于IEEE 802.15.4a中规定的帧结构建立信号的数学模型,主要通过两个步骤来从接收到的信号中得到接收到物理层报头PHR的时刻(ranging marker)。第一步为确定前导码中表征每一个符号的脉冲序列中第一个脉冲的到达时间;第二步为定位帧分隔符(SFD)确切的起始位置;由于SFD长度已知,等效于得到物理层报头PHR开始的确切位置。
文献[15]的工作被IEEE 802.15.4a有关于UWB定位技术的附录D1部分引用,文章中提出了在NLOS环境中,不仅仅只有通过视距路径(line-of-sight,LOS)到达的信号才可以用来进行定位估计。文章利用估计理论与统计推断,讨论了在没有先验NLOS传输延迟统计信息以及有先验NLOS传输延迟统计信息两种不同情况下不同的估计算法对于定位精度的影响,并且做了相应的仿真实验。证明了在没有先验NLOS统计信息的条件下,最大似然估计(ML)是更好的估计方式,当NLOS统计信息先验的情况下,并考虑这些先验信息,最大后验估计(MAP)会得到比仅仅使用首达信号的信息更为精确的定位精度。与此同时,作者在文中也提到利用多径到达的信号必然会增加运算复杂度,很多情况下需要做适当的折中。
很多研究工作关心的都是定位精度的问题,文献[11,13,17-18]都在提高定位精度方面做了值得称道的工作。很多因素都会影响到定位精度,比如多径干扰、采样率的限制、本地接收机振荡器的相位噪声以及系统时钟的抖动和漂移。其中文献[11]的工作实现了二维在有障碍物遮蔽的条件下亚米级的精确定位,他们的实验工作也被录制成了视频放在了互联网上。文献[17]得到了厘米级的测量精度。然而也必须看到实验中还是有一定的理想假设的,比如时钟是严格同步的。
4.2.2 定位算法的创新
一些文献中的工作也提出了不少新的观点,笔者认为其中一些观点对于未来定位算法的发展有很好的参考价值与借鉴意义。其中值得一提就是文献[9,14]提出来的AOA与TOA结合使用测距的思想。如图5所示,在最理想的情况下,单一的TOA测距只能得到笛卡尔坐标系下的欧氏距离信息,所以至少需要三个参考节点才能实现定位,而AOA与TOA结合的定位算法,等效于将目标节点至于极坐标系下考量,如果既能得到距离信息和角度信息,则最少的情况只要一个参考节点就可以实现定位。
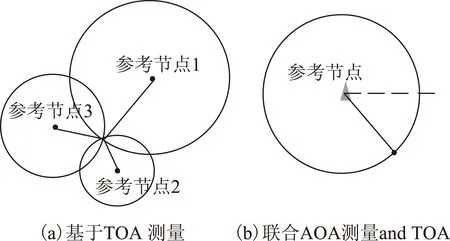
图5 传统TOA定位与联合定位
文献[9]在UWB信号带宽分别为0.5 GHz和1.5 GHz的条件下的仿真结果说明联合定位算法在性能和功耗上都有优势,文献[14]说明了在LOS环境下,联合定位的表现并不比TOA算法优异,但是在NLOS环境下联合定位的性能明显优于TOA定位算法性能。
文献[19]提供了一个有趣的思路,对于已知几何形状的环境中,只利用一个参考节点,而对其各种反射的信息加以利用实现定位。类似于光学中的镜像,文章将参考节点,或称之为锚节点(Anchor Node)关于墙壁的镜像称之为虚锚节点(Virtual Anchors)。需要认识到这种想法目前来说可实现性还比较差,但随着相关学科比如图像处理技术的进一步发展,这种想法也是有机会成为现实的。
4.2.3 协同定位(Cooperative Position)
协同定位在无线定位系统中有着广阔的发展前景,很多文献将UWB技术作为用户间协同的手段,进行了诸多卓有成效的研究,如文献[4,8,21,23]及其中所引用的一些文献。基于协同的定位思想可以很好地提高在复杂电磁环境下定位的精确性。实现协同定位也有多种思路,文献[23-25]报告了该领域许多研究成果,其中文献[23]描述了几种不同的协同定位算法,其中利用因子图建立网络的图形模型并提出SPAWN算法。文献[24]从协同定位的应用、基本原理、定位基本算法等方面对协同定位思想做了一个完整的综述。文献[25]讨论协同定位在导航领域中的应用与性能限制因素。协同定位研究的文献还有很多,篇幅所限在此不赘述。
5 结束语
本文结合最新的一些研究文献对UWB技术在定位技术方面的应用做了一个总体的概述。IEEE 802.15.4a协议对UWB的物理层和MAC层都做了详细的规定,也使得UWB技术能够更好地进入实际应用阶段。文章也旨在对最新的研究成果的介绍,希望吸引更多的学者进入相关的领域从事研究工作。
[1] CHIU D S,O’KEEFE K P.Seamless Outdoor-to-indoor Pedestrian Navigation Using GPS and UWB[C]//Proceedings of the 21st International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2008).Savannah,GA:the Institute of Navigation.2008:322-333.
[2] ZHOU Yuan,LAW C,GUAN Yong-liang,et al.Indoor Elliptical Localization Based on Asynchronous UWB Range Measurement[J].IEEE Transactions on Instrumentation and Measurement,2011,60(1):248-257.
[3] IEEE Std 802.15.4a,Wireless Medium Access Control(MAC) and Physical Layer(PHY) Specifications for Low-Rate Wireless Personal Area Networks(WPANs)[S].
[4] BARGSHADY N,ALSINDI N,PAHLAVAN K,et al.Bounds on Performance of Hybrid WiFi-UWB Cooperative RF Localization for Robotic Applications[C]//Proceedings of the 21st International Symposium on Personal,Indoor and Mobile Radio Communications Workshops (PIMRC Workshops).Instanbul:IEEE,2010:277-282.
[5] GEZICI S,TIAN Zhi,GIANNAKIS G,et al.Localization via Ultra-wideband Radios:a Look at Positioning Aspects for Future Sensor Networks[J].IEEE Signal Processing Magazine,2005,22(4):70-84.
[6] WOOD S,AIELLO R.Essentials of UWB[M].New York:Cambridge University Press,2008.
[7] D’AMICO A,MENGALI U,TAPONECCO L.TOA Estimation with the IEEE 802.15.4a Standard[J].IEEE Transactions on Wireless Communications,2010,9(7):2238-2247.
[8] LIEN J.A Framework for Cooperative Localization in Ultra-wideband Wireless Networks[D].Cambridge,MA:Massachusetts Institute of Technology,2007.
[9] TAPONECCO L,D’AMICO A,MENGALI U.Joint TOA and AOA Estimation for UWB Localization Applications[J].IEEE Transactions on Wireless Communications,2011,10(7):2207-2217.
[10]ENDA K,KOHNO R.UWB Localization Algorithm to Improve Accuracy under NLOS Environment[C]//Proceedings of the 22nd International Symposium on Personal Indoor and Mobile Radio Communications (PIMRC).Toronto:IEEE,2011:1187-1191.
[11]SELIMIS G,ROMME J,PFLUG H,et al.Sub-meter UWB Localization:Low Complexity Design and Evaluation in a Real Localization System[C]//Proceedings of the 24th International Symposium on Personal Indoor and Mobile Radio Communications (PIMRC).London:IEEE,2013:186-191.
[12]UGUEN B,LAARAIEDH M,DENIS B,et al.Extraction and Characterization of Location-dependent UWB Radio Features with Practical Implications for Indoor Positioning[C]//Proceedings of the 18th European Wireless Conference (2012.EW.).Poznan,Poland:VDE,2012:1-10.
[13]YE Rui-qing,REDFIELD S,LIU Hua-ping.High-precision Indoor UWB Localization:Technical Challenges and Method[C]//Proceedings of 2010 IEEE International Conference on Ultra-wideband (ICUWB).Nanjing,China:IEEE,2010:1-4.
[14]IRAHHAUTEN Z,NIKOOKAR H,KLEPPER M.2D UWB Localization in Indoor Multipath Environment Using a Joint TOA/DOA Technique[C]//Proceedings of 2012 IEEE Wireless Communications and Networking Conference (WCNC).Shanghai China:IEEE,2012:2253-2257.
[15]QI Yi-hong,KOBAYASHI H,SUDA H.On Time-of-arrival Positioning in a Multipath Environment[J].IEEE Transactions on Vehicular Technology,2006,55(5):1516-1526.
[16]STEINER C,WITTNEBEN A.Low Complexity Location Fingerprinting with Generalized UWB Energy Detection Receivers[J].IEEE Transactions on Signal Processing,2010,58(3):1756-1767.
[17]CETIN O,NAZH H,GURCAN R,et al.An Experimental Study of High Precision TOA Based UWB Positioning Systems[C]//Proceedings of 2012 IEEE International Conference on Ultra-wideband (ICUWB).Syracuse,NY:IEEE,2012:357-361.
[18]ELKHOULY E,FATHY A,KUHN M,et al.Investigation of Challenges towards Achieving Sub-millimeter Accuracy for UWB Localization[C]//Proceedings of 2011 IEEE International Symposium on Antennas and Propagation (APSURSI).Spokane,WA:IEEE,2011:137-140.
[19]MEISSNER P,STEINER C,WITRISAL K.UWB Positioning with Virtual Anchors and Floor Plan Information[C]//Proceedings of the 7th Workshop on Positioning Navigation and Communication (WPNC).Dresden,Germany:IEEE,2010:150-156.
[20]WANG Ping,RUAN Huai-lin,FAN Fu-hua.A Method of Indoor Multi-path IR-UWB Localization Based on Bayesian Compressed Sensing[C]//Proceedings of the 11th International Conference on Signal Processing (ICSP).Beijing,China:IEEE,2012:56-59.
[21]MORAGREGA A,IBARS C.Performance Analysis of Cooperative and Range Based Localization Algorithms for Zigbee and 802.15.4a Wireless Sensor Networks[C]//Proceedings of the 21st International Symposium on Personal Indoor and Mobile Radio Communications (PIMRC).Instanbul:IEEE,2010:1996-2001.
[22]DING Jie,DUTKIEWICZ E,HUANG Xiao-jing,et al.Energy-efficient Cooperative Relay Selection for UWB Based Body Area Networks[C]//Proceedings of 2013 IEEE International Conference on Ultra-Wideband (ICUWB).Sydney,NSW:IEEE,2013:97-102.
[23]WYMEERSCH H,LIEN J,WIN M.Cooperative Localization in Wireless Networks[J].Proceedings of the IEEE,2009,97(2):427-450.
[24]WIN M,CONTI A,MAZUELAS S,et al.Network Localization and Navigation via Cooperation[J].IEEE Communications Magazine,2011,49(5):56-62.
[25]SHEN Yuan,MAZUELAS S,WIN M.Cooperative Network Navigation:Fundamental Limit and Its Geometrical Interpretation[EB/OL].[2014-03-21].http://www.researchgate.net/publication/51964610_Cooperative_Network_Navigation_Fundamental_Limit_and_its_GeometricalInterpretation.
A Review of UWB Applications in Wireless Location Technology
TONG Kai-xiang1,ZHOU Xuan2,LI Guang-xia1,LIU Bing3,TIAN Shi-wei1
(1.College of Communications Engineering,PLA University of Science and Technology,Nanjing 210007,China;2.Troops 61773,Urumqi 830014,China;3.Academy of Opto-electronics,Chinese Academy of Sciences,Beijing 100094,China)
Because of its high data rate and fine time resolution,the ultra-wideband (UWB) technology has aroused great interest as a positioning technology used in a short distance,complex wireless sensor network environment.In this paper,through the development process of UWB technology and a combination of a lot of the latest work,the article discusses the UWB technology-based wireless sensor network positioning technology and algorithms.Combined with some of the latest research results,we discussed the problems exist and the development direction of UWB-based wireless location technology.
UWB;wireless networks;localization techniques
2014-03-31
童凯翔(1991),男,江西玉山人,硕士,主要从事卫星导航和室内外协同定位的算法研究工作。
TN96
A
2095-4999(2015)-01-0010-05
