基于特征点匹配的接触网磨损检测研究
2015-05-05赖庆峰叶俊勇
赖庆峰,叶俊勇
(重庆大学光电技术及系统教育部重点实验室,重庆400044)
0 引言
接触网是轨道交通牵引供电系统的重要组成部分。为保证轨道交通的正常运营,接触网检修是轨道交通运营维护中的重要工作,而接触网磨损检测又是其中的重点和难点。目前,电气化铁路中接触网磨损检测的方法主要有:图像检测法、激光扫描法、残高测量法三大类[1]。Kalikin[2]等介绍了基于结构光的铁路接触网检测系统。占栋[3]等针对地铁供电系统设计了基于线阵相机的接触轨几何参数动态检测系统,系统的检测精度为±2mm。朱挺[4]根据上海城轨交通接触网的特点研究了开发专用非接触式接触网检测系统的关键技术。
重庆市跨座式单轨交通采用的刚性接触网[5]在结构设计、安装位置和授流方式等方面均与电气化铁路和地铁轨道交通的接触网有很大的区别。以上所述检测方法都无法直接使用在跨座式单轨交通的接触网磨损检测中。目前,跨座式单轨交通的接触网磨损检测主要依靠人工巡检的方式,其安全性差,劳动强度大,工作效率低,缺乏准确性和规范化,无法保证检测精度。因此,跨座式单轨交通的接触网磨损检测要求由人工检测向自动化检测技术发展,以使接触网磨损检测与评估更快速、安全、可靠。
针对跨座式轨道交通接触网的特点进行了研究,进而设计了一种基于线阵立体视觉的接触网磨损检测方法。对于立体视觉的匹配问题,提出一种基于FAST[6]和SURF[7]特征匹配的线阵立体视觉匹配算法。算法结合了FAST特征点的快速、稠密和SURF特征向量对于旋转、平移不变性等特点。能够生成准确、稠密的视差图,进而计算出接触网的残高值,以方便对其及时进行维护和检修。
1 线阵立体视觉原理
线阵立体视觉由2台线阵相机搭建而成,其原理是机器视觉技术[8]。如图1所示,AB为左相机的像平面,CD为右相机的像平面,且AB和CD 精确位于同一平面。假设左右相机的光轴(光轴是从投影中心O朝向主点C方向引出的一条射线)平行,并且假设主点Cleft和Cright已经校准,在左右图像上具有相同的像素坐标,左右相机的焦距相等。进一步假设相机是前向平行排列(即左右相机的像素行完全对准)。假设立体相机的有效视场中有一点P,其在左右相机上的成像点为PL和PR,相应的水平像素坐标值为XL和XR。B为两相机之间的基线距。视差定义为。则点P的深度Z可由相似三角测量原理[9]推导得出:


图1 共面线阵立体视觉原理
B和f可由相机标定技术[10]计算得出,因此计算点P的深度Z的关键是获得准确稠密的视差值d。
2 基于FAST和SURF特征向量的线阵立体匹配
立体视觉的图像匹配是图像处理领域的热点和难点。现有图像匹配技术大致分为基于灰度值和基于特征两大类。其中,基于特征的方法具有计算量小,良好的鲁棒性,对图像旋转、平移、亮度变化具有较好的适应能力等优点而获得了广泛的应用,常用的特征有角点、边缘和区域等。
特征点的提取是后续的图像匹配基础。现有的特征点提取算法有 FAST,SIFT[11]和SURF等。FAST是Rosten和Dru mmond于2006年提出的一种简单、快速的角点检测算法,能提取出大量的特征点。但其没有相关的特征描述符使不具备旋转和平移不变性。Lowe提出的SIFT算法具有旋转、尺度和亮度不变性及良好的抗噪声能力。但其时间复杂度高、算法耗时长。Bay等人于2006年提出了SURF算法,该算法的性能接近SIFT,由于引入积分图像的概念,使得其具有耗时少、计算速度快等优点,但获得的匹配点数量少。
针对上述算法的不足,提出的基于FAST和SURF特征的匹配算法结合了两者的优点。在FAST算法检测出的大量特征点基础上为特征点构造SURF特征向量使其具有平移和旋转不变性。从而能够快速、准确的匹配出大量的匹配点。基于FAST和SURF特征匹配的算法的框架如图2所示。具体步骤为:
①对于对应的接触网图像用FAST特征检测算法提取左右图像的FAST特征点集。
②为上述检测出的所有特征点集确定主方向并构造相应的SURF特征向量。
③采用双向FLANN算法[12]匹配左右图像的特征点集,得出对应的匹配点对。
④用随机抽样一致性算法(RANSAC)[13]剔除匹配点对中的误匹配点对。

图2 算法框架
2.1 FAST特征点检测
FAST特征检测算法能快速,有效的提取出大量的特征点。FAST算法将检测特征点定义为:特征点的领域有足够多的像素值大于或小于该点的像素值。FAST特征检测算法基于特征点周围的图像像素值,检测候选特征点周围一圈的像素值,如果候选点周围领域内有足够多的像素点与该候选点的灰度值差别超过阈值,则认定该候选点为一个特征点。

I(p)为圆心的像素值;I(x)为圆周上任意一点的像素值;Ed为像素值差的阈值。如果N大于给定阈值则认为是一个特征点。
2.2 SURF特征向量
为使得FAST特征点具有旋转和平移不变性。需要利用FAST特征点邻域像素的梯度方向特性,为每一个特征点计算SURF特征向量[14],使得特征点具有对图像的平移和旋转不变性,从而能够准确的进行匹配。
首先,需要为每一个特征点确定一个主方向。在以FAST特征点为中心,6s(s为特征点的尺度)为半径的圆形区域内,统计60°扇形内所有像素点的水平和垂直Harr小波响应总和,这样每一个扇形都得到了一个值。然后扇形以0.2rad为步长进行旋转,最后将响应值最大那个扇形的方向作为该特征点的主方向。
其次,基于Harr响应生成特征向量,在特征点周围取一个正方形框,框的边长为20s,该框的方向为以上所检测出来的主方向。然后将这个框分为个子区域,统计每个子区域5s×5s范围内的水平和垂直方向的Harr小波响应分别为dx和dy,这里是水平和垂直方向都是相对于主方向而言的。然后将每个区域的响应系数及其绝对值相加形成特征向量。则每个子区域的Harr小波特征矢量为v=(∑dx,∑|dx|,∑dy,∑|dy|)。这样每个小区域就有4个值,每个特征点就有(4×4)×4=64维的特征向量。再对特征向量进行归一化处理,就能够使其对光照具有一定的鲁棒性。
2.3 特征点匹配
对于对应的左右图像FAST提取的特征点构造SURF特征向量之后,需要进行特征点匹配。为提高匹配的速率,采用双向快速近似最近邻(FLANN)搜索算法进行匹配。对于提取的左图像特征点集P和右图像特征点集Q,双向FLANN算法步骤如下:
a.对于P中一点pi,使用FLANN算法计算在Q中的与pi的SURF特征向量具有最小欧氏距离的一点qj,得到初始匹配点对(pi,qj)。
b.对于Q中一点qm,使用FLANN算法计算在P中的与qm的SURF特征向量有最小欧氏距离的一点pn,得到初始匹配点对(pn,qm)。
c.仅当i=n,且j=m时才认为匹配成功。
d.遍历P和Q中的所有点,找到所有初始匹配点集。对于初始匹配点集中的匹配点对,利用随机抽样一致性(RANSAC)算法剔除欧氏距离大于阈值的误匹配点对。
3 实验结果与分析
为了验证方法的有效性和合理性,共进行了2组实验。实验1比较FAST-SURF特征匹配算法和SURF及SIFT在匹配的特征点数量和匹配时间上的差异。以此说明匹配算法的的快速性和稠密性。实验2试验算法对基线距与光照亮度的鲁棒性并对本文方法检测接触网残高值与人工测量的数据进行对比分析。实验数据来源于采用2个e2v公司的AviivA SM2系列高速线阵相机和Euresys公司的Grablink Expert2图像采集卡同步采集的线扫描图像,图像大小为500像素×800像素。实验环境的CPU为Inter Pentium Dual,主频1.60GHz,内存3GB,操作系统为 Windows 7,开发环境为 Microsoft Visual Studio 2010。
3.1 SIFT,SURF和FAST-SURF的匹配结果
为了比较SIFT,SURF和FAST-SURF算法在特征提取数量及匹配速度上的差异,分别用相应的算法对3组不同的接触网图像进行匹配,实验结果如表1所示。图3a、图3b分别是用SIFT算法所提取的特征点和匹配的图像;图3c、图3d分别是用SURF算法所提取的特征点和匹配图像;图3e、图3f分别是用FAST-SURF算法所提取的特征点和匹配图像。
由表1可以得出以下结论:SURF和SIFT匹配算法所提取的特征点总数、匹配点个数和误匹配点个数都相差不大,但是SURF匹配所用的时间只占SIFT算法70%左右。SURF作为SIFT的改进算法,其性能与SIFT相似,但由于引入了积分图像以及特征向量的维数降低,使得SURF的运行速度大大提高了。所以选用SURF算法而不用SIFT。此外,FAST-SURF匹配所提取的特征点总数是以上2种匹配算法的5.7倍,匹配点的个数是以上两种匹配算法的6倍,单位时间所匹配的特征点个数均比以上2种匹配算法多。以看出不同基线距(即相机之间的位移)对于图像的匹配基本不会产生影响。图7表示在图像亮度增加情况下,2种算法都会有匹配点减少的趋势,但是本文算法的匹配数量始终比SURF算法要多。
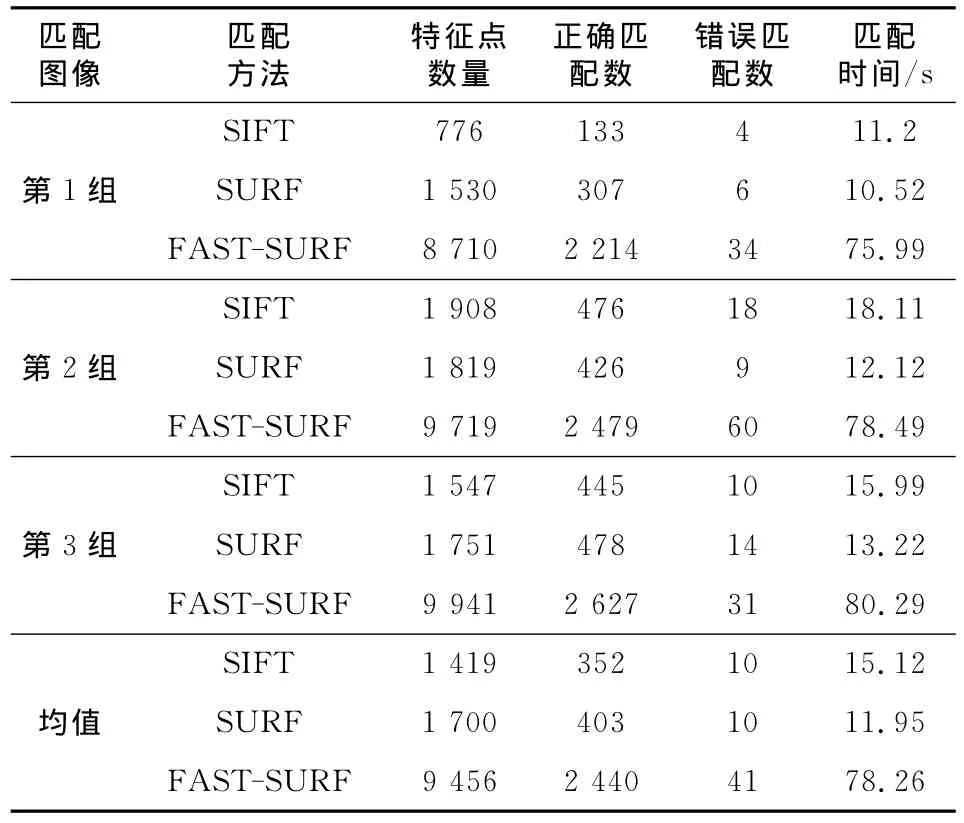
表1 SIFT,SURF和FAST-SURF提取的特征点数、匹配点数量和耗时
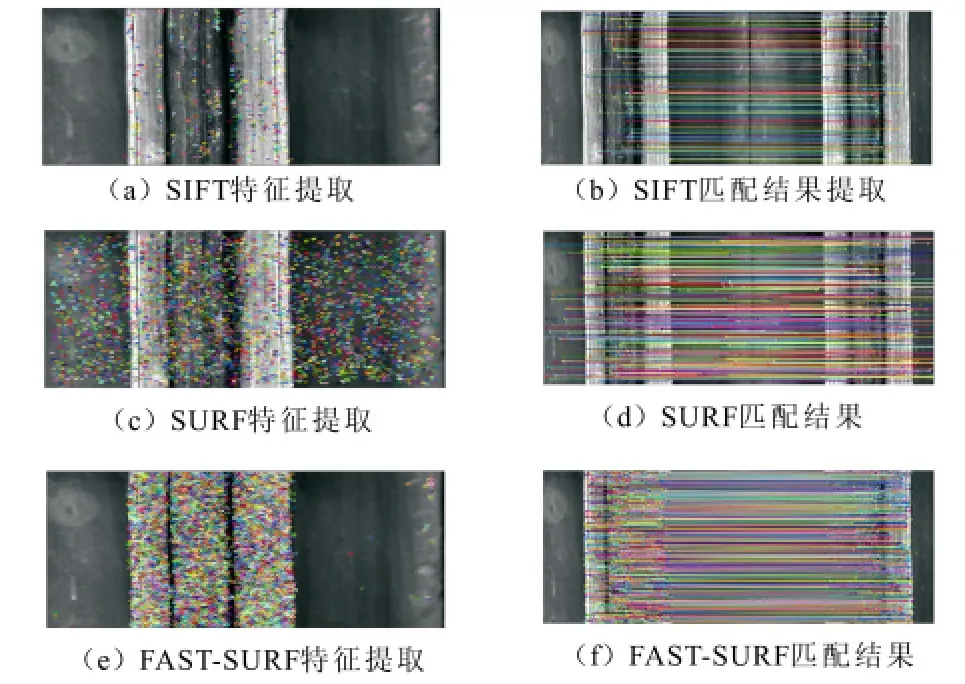
图3 用SIFT,SURF和FAST-SURF算法所提取的特征点及匹配结果
由式(1)可以将匹配所得的视差图计算得出接触网的深度值,进而得出接触网的残高。为了验证本方法的精度,用本文方法测量了厚度为10mm的标准件。实际测得的标准件厚度为9.853mm。可见本接触网磨损检测方法的检测精度在1mm以内。
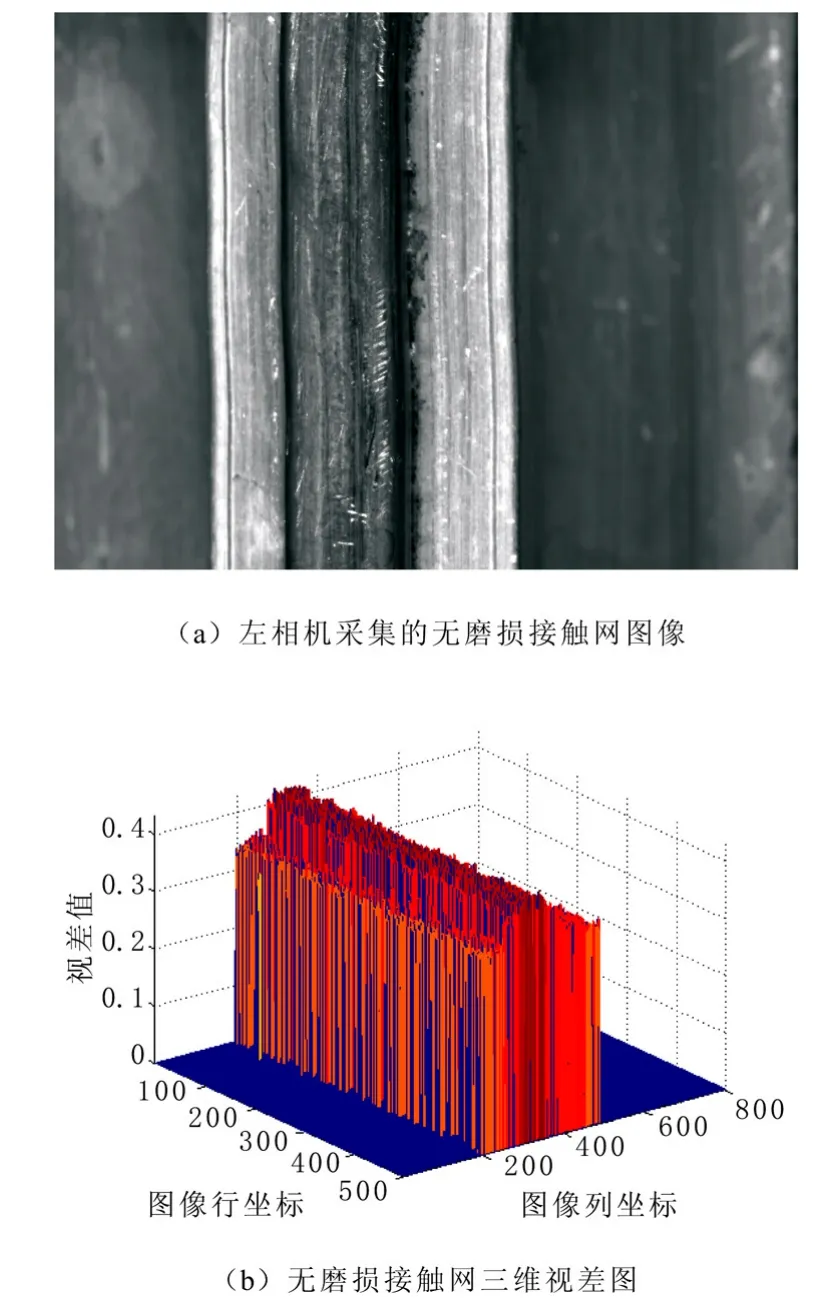
图4 无磨损接触网图像和对应的三维视差
从图3也可以直观的看出各算法匹配效果之间的区别。综上所述,FAST-SURF匹配算法在所提取的特征点和匹配点不仅在数量上比SIFT和SURF匹配算法得到了成倍的提升,在匹配速度上也比这两种算法快。
3.2 基于FAST-SURF的接触网检测实验分析
为验证检测方法的有效性,对采集的接触网图像进行分析。对于无磨损的接触网图像和有磨损的接触网图像进行对比分析。图4a为无磨损接触网原图像,图4b为由本文算法所匹配得出的三维视差图。图5a为磨损接触网的原图像,图5b、图5c为用本文算法所匹配得出的三维视差图。可以直观的看出能够准确地检测出接触网的磨损情况。图6表示在2个相机的基线距变化的情况下的匹配情况,可

图5 磨损接触网图像和对应的三维视差
图8为本文测量方法测得的接触网残高和用游标卡尺人工测量数据的精度验证曲线图,可以看出本文检测方法能准确的检测接触网的磨损情况,达到了预期的设计效果。

图6 不同基线距下的匹配情况
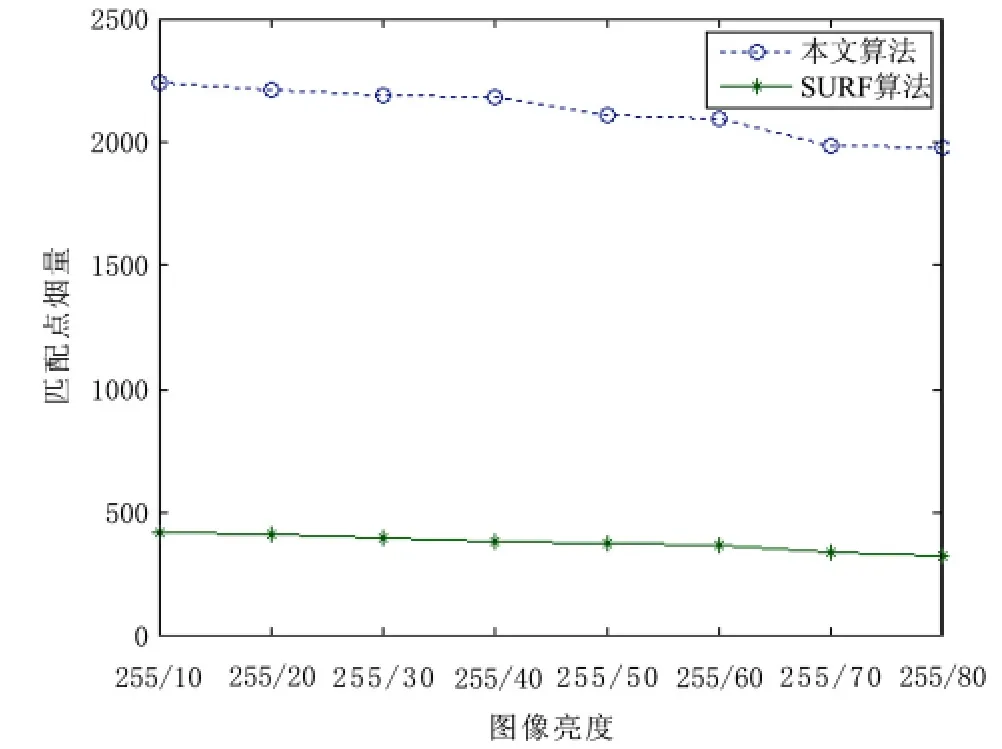
图7 不同光照亮度下的匹配情况

图8 接触网残高检测精度验证曲线
4 结束语
跨座式单轨交通的接触网不同于铁路和地铁的接触网系统,需要针对其设计出实际可行的接触网磨损检测方法。采用基于线阵立体视觉的接触网磨损检测方法,其中基于FAST和SURF的特征匹配算法结合了FAST特征检测算法简单、快速、高效和SURF特征描述子的旋转、平移不变性,能十分快速精确的检测出接触网的磨损情况。从实验数据来看,所检测的数据与人工所测数据的符合率非常之高,对于自动化的跨座式单轨交通的接触网磨损检测系统的研究具有一定的实用价值。今后,可以在匹配算法上进行改进,以进一步加快匹配的速度,尽可能达到实时性要求。
[1] 彭朝勇,高晓蓉.国外接触网磨耗检测系统[J].中国铁路,2007,46(04):66-68.
[2] Kalikin V E,Verkhogliad A G,Kalichkin S V.Automatic opto-lectronic system for inspection of wire wear using high-speed image analysis[C]//Proceeding of the 8th International Conference,2011:201-204.
[3] 占栋,陈唐龙,于龙,等.基于线阵相机的接触轨几何参数动态检测系统[J].现代城市轨道交通,2012,9(01):41-44.
[4] 朱挺.新型国产轨道交通接触网检测系统研究[J].都市轨道交通,2012,25(6):12-16.
[5] 谢风华.跨座式单轨接触网结构设计[J].现代城市轨道交通,2005,4(04):12-14.
[6] Rosten,Drummond T.Machine learning for high-speed corner detection[C]//European Conference on Computer Vision,Graz,Austria,2006:430-443.
[7] Bay H,Ess A,Tuytelarrs T,etal.SURF:Speed up robust features[J].Computer Vision and Image Understanding,2008,110(3):346-359.
[8] Carsten Steger,Markus Ulrich.机器视觉算法与应用[M].北京:清华大学出版社,2008.
[9] Gary Bradski,Adiran Kaebler.学习 OpenCV(中文版)[M].于仕琪,刘瑞祯,译.北京:清华大学出版社,2009.
[10] Zhang Z.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern Analysis and.4 Machine Intelligence,2000,22(11):1330-1334
[11] Lowe D G.Distinctive image features from scale-invariant keypoints[J].International Journal of Computer Vision,2004,60(2):91-110.
[12] 赵璐璐,耿国华,李康,等.基于SURF和快速近似最近邻搜索的图像匹配算法[J].计算机应用研究,2013,30(3):921-923.
[13] Fischler M A,Bolles R C.Random sample consensus:aparadigm for model fitting with applications to image analysis and automated cartography[J].Communications of the ACM,1981,24(6):381-395.
[14] 林晓帆,林立文,邓涛.基于SURF描述子的遥感影像配准[J].计算机工程,2010,36(12):216-218.