船舶三自由度运动试验平台控制系统设计与仿真
2015-05-05赵锬鸿
刘 伟,赵锬鸿
(1.中国矿业大学(北京)机电与信息工程学院,北京100083;2.北京科技大学机械工程学院,北京100083)
0 引言
现代科学技术的发展使得海上运输交通工具的可靠性得到大幅度的提升,而在实际海洋环境中进行实验或者训练是不切实际的,成本代价太大,可操作性太差,甚至会带来意想不到的风险后果。通过模拟船舶受到海上风浪吹打而产生的不同运动状态,可以高效测试船舶的航行状况,并且在提高效果的同时降低模拟试验的成本。三自由度平台由伺服液压系统来驱动,可以实现沿Z轴(垂直轴)的移动及绕X、Y轴(水平轴)的转动,可模拟刚体在空间的运动状态,平台可表现仰俯、侧翻及上下等三种动作。主要对三自由度船舶运动试验平台的液压伺服控制系统进行设计和仿真[1-3]。
1 三自由度运动平台结构及控制方案
三自由度运动模拟平台的机械结构由1个上运动平台、1个下层固定平台、3个液压缸、球形铰链和其他相关配件组成。上层平台为动平台,分别用球铰与液压缸连接,下固定平台通过运动铰链限制运动的自由度。机械结构采用并联结构连接方式。并联机构具有精度高、结构较为简单、承载能力相对较强、累计误差相对较低,系统的动态响应速度较快等优点。上下两个平台的3个支撑点均采用直角三角形布置,这对于模拟纵摇和横摇运动时的运算解耦较为简便,便于控制。在3个液压缸伸缩的运动过程中,可以实现上平台沿Z轴的平移运动(即模拟平台的升沉运动)、绕X轴的空间旋转运动(横摇运动)以及绕Y轴的空间旋转运动(纵摇运动),可知在当3个液压缸伸缩的长度一定时,可模拟升沉、横摇和纵摇3种姿态的运动。
船舶三自由度运动试验平台的控制系统如图1所示,采用液压伺服控制系统,平台以3个阀控缸作为平台运动的控制对象,通过控制伺服阀输入信号来控制各个液压缸的输出位移,进而使平台按照给定的性能指标实现运动环境的模拟。为了能够对液压伺服系统进行位置闭环控制,需要通过位移传感器检测液压缸活塞杆的实际位置,然后与理论需要的活塞杆位置进行比较,以它们的差值作为伺服阀的控制信号,实现液压缸位置的跟踪。计算机给每个液压缸发出指令信号,与位移传感器的信号进行比较,通过PID校正和补偿,经伺服放大器进行放大,输入电液伺服阀,经过电液伺服阀的转换和放大后输出液压能,输出的液压能推动液压缸活塞移动,这样液压缸活塞移动的位置总是按照指令信号给定的规律变化[4-5]。液压缸的移动又会带动位移传感器移动,从而形成整个闭环控制。

图1 船舶三自由度运动试验平台控制系统原理
2 液压伺服系统建模与仿真
2.1 液压伺服系统模型的建立
AMESim(advanced modeling environment for performing simulation of engineering systems)为多学科领域复杂系统建模仿真平台。基于对实际物理模型的建模,减少了烦琐的数学建模,可方便地对各种系统或元件进行动态性能和稳态性能的分析和研究[6]。打开软件AMESim建模界面,在液压库、机械库和信号库中,选取相应的元件模型 ,然后建立液压伺服控制系统模型,如图2所示。液压伺服控制系统模型主要由液压缸、电机、定量泵、位移传感器、速度传感器、信号源、质量块、伺服阀等构成。在子模型模式下,选择首选子模型。信号源9、10、11为计算机给定的指令信号,液压缸1、2、3按照相应的给定指令信号进行及时准确的跟随,从而实现船舶试验平台不同的运动功能。
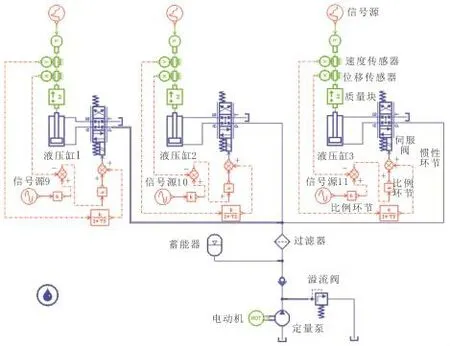
图2 液压伺服控制系统模型
2.2 仿真参数的设置
选择软件的参数模式,为每个元件设置参数。液压1、2、3活塞直径30mm,活塞杆直径20mm,液压缸行程0.5m,液压伺服阀4固有频率50Hz,位移传感器6和速度传感器7的增益为10。比例环节12和13的增益分别设置为10和400,惯性环节14的增益设为10,时间常数0.08s。模型中未标号但与标号元件模型和功能、位置一致的元件,也按上述设置。未设置的元件参数,选择默认参数。
2.3 仿真分析
选择仿真模式,设置仿真终止时间为30s,打印间隔为0.05s,进行仿真。在当前元件参数设置下,船舶三自由度运动试验平台模拟的是升沉运动,运行仿真,可以得到指令信号给定位移曲线如图3所示,液压缸同步位置误差曲线如图4所示。
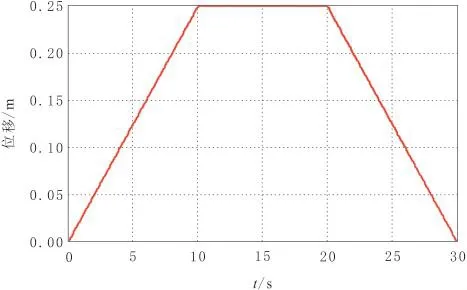
图3 指令给定位移
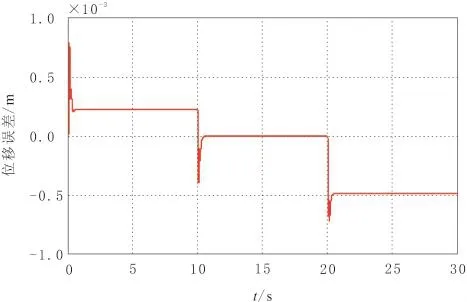
图4 液压缸位置误差
由图4可以看出,在船舶试验平台的模拟升沉运动中,液压缸的同步位置误差在0.8mm范围内,控制精度在0.5%之内,该液压伺服同步控制系统具有较高的控制精度,可以满足实际的使用要求。
由于船舶试验平台的纵摇运动和衡摇运动是控制不同的液压缸组合,所以只仿真纵摇运动的情形。为了使船舶试验平台模拟海浪运动,采用正弦规律信号来模拟。3个液压缸的实际运动曲线如图5所示,液压缸位置误差曲线如图6所示。从软件信号库中选择正弦规律信号源,分别替换原先相应位置的控制信号源。其中,1号液压缸的正弦规律控制信号源频率设置为0.08Hz,振幅0.2。2号和3号液压缸的正弦规律控制信号源频率设置为0.08 Hz,振幅0.2,初始相位移180°。1、2、3号液压缸的活塞初始位置分别设为0.25m,其他设置保持不变。

图5 液压缸实际位移曲线
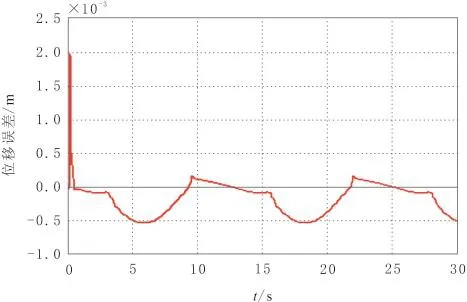
图6 液压缸位置误差曲线
从图5和图6可以看出,3个液压缸能够以较高的精度及时、准确地对控制信号规律进行复现和跟踪,位置误差在2mm之内,控制精度在0.5%以内,能够满足和实现对所需纵摇运动和衡摇运动的模拟。根据不同的工况和使用条件,可以对各个元件参数进行设置,以实现最佳的性能。
3 结束语
介绍船舶三自由度运动试验平台的机械结构,设计了船舶三自由度运动试验平台的液压伺服控制系统,引入PID控制,对控制系统进行校正和补偿。应用AMESim建模软件,对所设计的液压伺服控制系统进行建模,并对船舶试验平台的升沉运动、纵摇和衡摇运动进行仿真分析,结果显示,该控制系统可以有效、准确地使三自由度船舶试验平台对升沉运动、纵摇和衡摇运动进行模拟以及对控制信号的跟随和复现。
设计的船舶三自由度运动试验平台的液压伺服控制系统具有较高的控制精度和较低的误差范围。为船舶三自由度运动试验平台的设计和深入研究提供了一个参考。
[1] 曹辉,张均东.现代船舶轮机模拟器的应用与发展[J].航海教育研究,2012(1):33-36.
[2] 何治斌,张均东.国内外轮机模拟器的发展及对比研究[J].造船技术,2007(1):38-39.
[3] 王春行.液压控制系统[M].北京:机械工业出版社,1999.
[4] 雷天觉.新编液压工程手册[M].北京:北京理工大学出版社,1998.
[5] 王积伟,章宏甲,黄谊.液压与气压传动[M].北京:机械工业出版社,2005.
[6] 梁全,苏齐莹.液压系统AMESim计算机仿真指南[M].北京:机械工业出版社,2014.
